Изобретение относится к электро- технике и может быть использовано для создания поступательного движения с большой дискретностью позицио- нирстания, например в роботах-манипуляторах.
Цель изобретения - расширение функциональных возможностей путем обеспечения линейного перемещения с большой дискретностью позитдйонирова- ния.
На чертеже показано предлагаемое устройство.
Электродвигатель состоит из корпуса 1, выполненного из изоляционного материала, двух одинаковых соосно расположенных пружин 2 и 3 сжатия из электропроводного материала, покрытых изоляцией, ввитых одна в другую и консольно закрепленных противолежащими концами в корпусе 1. Внутри пружин 2 и 3 расположен шток 4 из изоляционного материала, закрепленный в корпусе 1. На пружины 2 и 3 с натягом надето звено 5 с отверстием 6, охватывающее пружины 2 и 3. Витки пружины 2 соединены с источниками 7 импульсного тока а витки пружины 3 с источником 8.
Электродвигатель работает следующим образом.
При пропускании импульсного тока от источника 7 (источник 8 выключен) через витки пружины 2 возникает электромагнитное поле, которое вызывает осевое перемещение витков пружишл 2 в направлении заделки пружины 2 в корпусе 1. Шаг навивки пружины 2 выбирается таким, чтобы при заданной амплитуде колебаний гарантировалось отсутствие электрического контакта между витками пружин 2 и 3, а изгиб- ные колебания витков пружины 2 и 3 ограничены штоком 4. Перемещаясь в осевом направлении, витки пружины 2 увеличивают свой радиальный размер, а следовательно, и натяг в зоне контакта с полостью 6 ведомого звена 5 Сила трения в зоне контакта витков
Редактор А.Шандор
Составитель В.Лавров Техред М.Ходанич
4834/54
Тираж 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
пружины 2 и полостью 6 ведомого звена 5 увеличивается, и витки пружины 2 увлекают ведомое звено 5 за собой. При отсутствии импульса от источника витки пружины 2 перемещаются в обратном направлении, радиальный размер витков уменьшается и витки проскальзывают по поверхности полости 6 ведомого звена 5. В результате ведомое звено 5 начинает линейно перемещаться в направлении заделки пружины 2 в корпусе 1.
Для осуществления реверса импульсный ток пропускается через пружину 3 от источника 8 (источник 7 выключен). Вследствие равномерного распределения колебательной энергии в зонах фрикционного контакта осуществляется
линейное перемещение ведомого звена с большой дискретностью позициониро- в ания.
Формула изобретения
1.Линейный электродвигатель, содержащий корпус и подвижный элемент, контактирующий с ведомым звеном, о т- личающийся тем, что, с
целью расширения функциональных возможностей путем обеспечения линейного перемещения с большой дискретностью позиционирования, подвижный элемент выполнен в виде по крайней.мере двух одинаковых соосно расположенных пружин сжатия из Электропроводного материала, ввитых одна в другую и консольно закрепленных противолежа- шдми концами, в корпусе внутри пружины размещен щток, закрепленный в корпусе, а в ведомом звене выполнено отверстие, причем пружины установлены в упомянутом отверстии с натягом, их противоположные концы снабжены зажимами для подключения к импульсному источнику питания.
2.Электродвигатель по п., о т- личающийся тем, что поверхность пружин покрыта изоляционным материалом.
Корректор А.Ильин
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибродвигатель | 1984 |
|
SU1246266A1 |
| Линейный электродвигатель | 1986 |
|
SU1365275A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2222091C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2227957C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2227956C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2153758C1 |
| Привод робота-манипулятора | 1988 |
|
SU1576308A1 |
| Электромеханический модуль промышленного робота | 1984 |
|
SU1274920A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2149493C1 |
| Манипулятор | 1991 |
|
SU1821355A1 |
Изобретение относится к электротехнике и может быть использовано для создания ноступательного движения с большой дискретностью позицио- .нирования, например в роботах-манипуляторах. Целью изобретения является расширение функциональных возможностей путем обеспечения линейного перемещения с большой дискретностью позиционирования . Электродвигатель состоит из корпуса 1, двух одинаковых соосно расположенных пружин сжатия 2 и 3 из электропроводного материала, покрытых изоляцией, ввитых одна в другую и консольно закрепленных противолежащими концами в корпусе. На пружины с натягом надето ведомое звено 5. При подсоединении концов пру- жин к источнику импульсного тока 7 или 8 под действием тока происходит перемещение витков пружины в направлении заделки. При одновременном увеличении радиального размера пружины увеличивается натяг в зоне контакта с ведомым звеном 5, что приводит к линейному перемещению последнего с большой дискретностью позиционирования . 1 3. п. ф-ль;, 1 ил. SS СЛ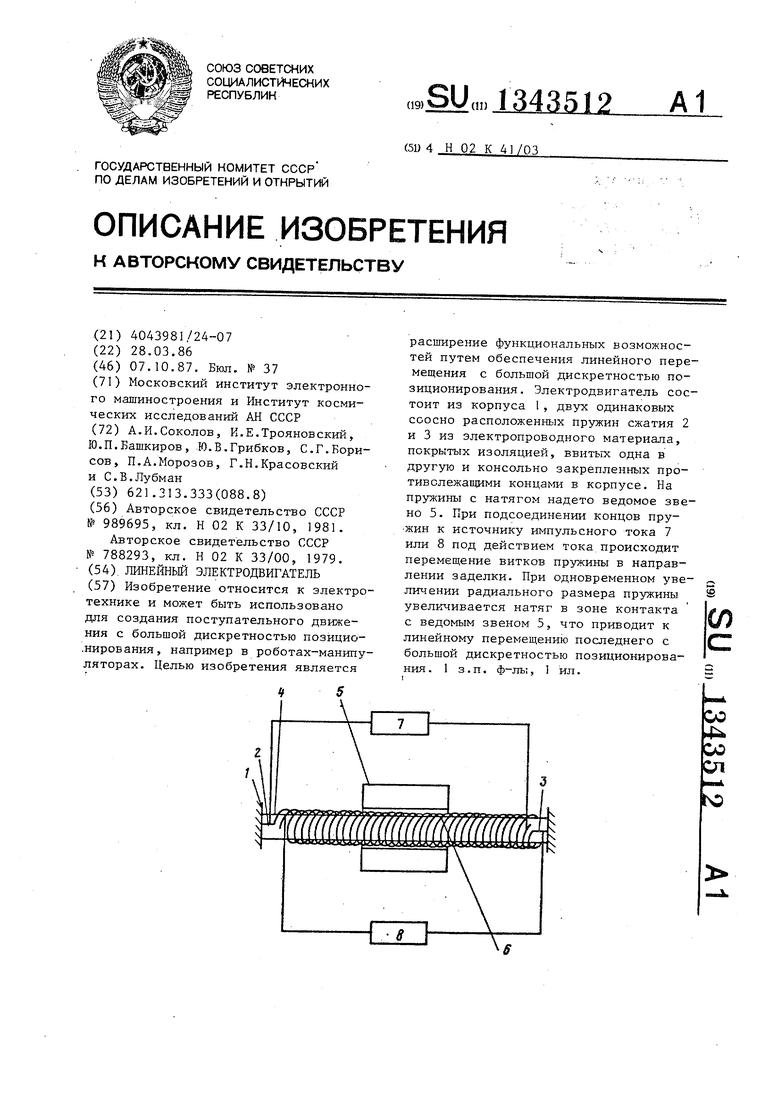
| Вертикальный линейный электродвигатель | 1981 |
|
SU989695A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электродвигатель возвратно- поступательного движения | 1979 |
|
SU788293A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
