1
Изобретение относится к электронике и может быть использовано в различных областях промышленности и транспорта, в частности на транспортных средствах с асинхронными ко- роткозамкнутыми двигателями и инверторами,
Цель изобретения - повьшение ин- тенсивйости и снижение времени торможения .
На фиг. 1 представлена принципиальная схема частотно-регулируемого .электропривода; на фиг. 2 - его тормозные характеристики.
Частотно-регулируемый электропривод содержит асинхронный двигатель 1 с короткоеамкнутым ротором, статорна обмотка которого подключена к инвертору 2, вход которого соединен с управляемым выпрямителем 3 (регулятором напряжения, фиг. 1), блок 4 управления регулятором напряжения в режиме Тяга и Торможение асинхронного двигателя, блок 5 управления инвертором в режиме Тяга и Торможение , выход которого через сумматор 6 соединен с управляющим входом инвертора 2, второй вход сумматора 6 подключен к датчику 7 частоты вращения, тормозной резистор 8 со средним выводом, подключенный через управляемый ключ 9 параллельно входу инвертора 2, блок 10 задания режимов работы, три выхода которого соединены соответственно с управляющими входами блока 4 управления регулятором 3 напряжения, блока 5 управления инвертором 2 и управляемым ключом 9« Датчик 1 i тока и датчик 12 напряже-. ния соединены с входами блоков 4 и 5 управления регулятором напряжения и инвертором, датчик.13 потока и датчик 7 частоты вращения подключены к другим входам блока 5 управления инвертором 2, Регулятор 14 тока торможения состоит из трех тиристоров, аноды которых объединены и соединены со средним выводом тормозного резистора 8, а катоды подключены к выхода инвертора 2. Электропривод содержит также датчик 15 тока торможения, бло 16 управления регулятором тока торможения, составленного из последовательно соединенных компаратора 17, управляемого ключа 18, системы 19 управления упомянутыми тиристорами регулятора 14 тормозного тока. Вход компаратора 2 соединены с датчиком I3 потока и датчиком 15 тока тормо
0
5
0
5
жения, включенного в цепь тормозного резистора.3, а управляющий ключ 18 соединен с дополнительным выходом блока управления режимами Тяга и Торможение.
Электропривод работает следующим образом.
Блоком 10 задается необходимый режим работы электропривода. В тяговом режиме с блока 10 поступают командь: Б блоки 4 и 5 управления и на управляемые ключи 9 и 18 для структурной перестройки схемы электропривода. При этом в блоке 4 управления регулятором напряжения в режиме Тяга и Тормо- женяе ключом 20 происходит переключение управления регулятором 3 напряжения на режим Тяга. При зтом напряжение асинхронной машины, формируется посредством задания длительности импульсов управления, сформирова1гаых в блоке 20 регулирования напряжения в режиме Тяга блока 4 управления и поступающих через ключ 21 и систему
22управления на управляющий вход регулятора 3 напряжения.
Аналогичное переключение происходит в блоке 5 управления инвертором. Сигнал, пропорциональный частоте скольжения f, формируется в блоке
23управления инвертором в режиме Тяга. Через ключ 24 он поступает
в сумматор 6, где суммируется с сигналом fр, пропорциональным частоте 5 вращения асинхронной мащины 1, сформированным датчиком 7 частоты вращения. На вьшоде сумматора 6 формируется сигнал, пропорциональный частоте инвертора 2 f, поступанщий в систему 25 управления для формирования управляющих импульсов. При этом будет выполняться равенство
0
0
5
f,fp±f
Ч
II 1 и
S
+ соответствует тяговому -
где знак
режиму, а - - тормозному режиму. Одновременно управляемый ключ 9 отключает тормозной резистор 8 от силовой цепи, а управляемый ключ 18 в
50
блоке 16 исключает подачу импульсов системой 19 управления на управляющие электроды тиристоров. Тяуовые и тормозные характеристики частотно - регулируемого электропривода форми- 55 РУЮтся в блоках 5 управления регулятром 3 напряжения (задание напряжения асинхронного двигателя 1) и инвертором 2 (задание частоты тока статора асинхронного двигателя 1) с помощью
CHi narioB обратной связи по току, частоте вращения, магнитному потоку и напряжению асинхронного двигателя.
Предельные характеристики также формируются блоками 4 и 5, в которых сигналы обратной связи сравниваются с сигналами уставок - передельных величин у1;азанных параметров,
Перезсод электропривода на тормозной режим осуществляется, как и в тяговом режиме, блоком 10 с помощью структурной перестройки силовой схемы и системы управления.
При этом с помощью ключа 21 блок 4 управления регулятором напряжения переходит в режим работы от блока 26 регулирования напряжения в тормозном режиме. Этот блок осуществляет возбуждение асинхронного двигателя в начальный момент и поддержание устойчивого самовозбуждения асинхронного двигателя I в процессе резисторного торможения,
Ключом 9 тормозной резистор 8 вклю-25 момента, имеющего наименьшее
значение при максимальной частоте
чается в силовую цепь электропривода. Одновременно блок 5 управления инвертором с помощью ключа ,24 переходит на режим работы от блока 27 управления инвертором в тормозном режиме, на выходе которого формируется отрицательный сигнал скольжения.
Замыканием управляемого ключа 18 происходит подключение блока 16 управления регулятором тормозного тока к общей системе управления.
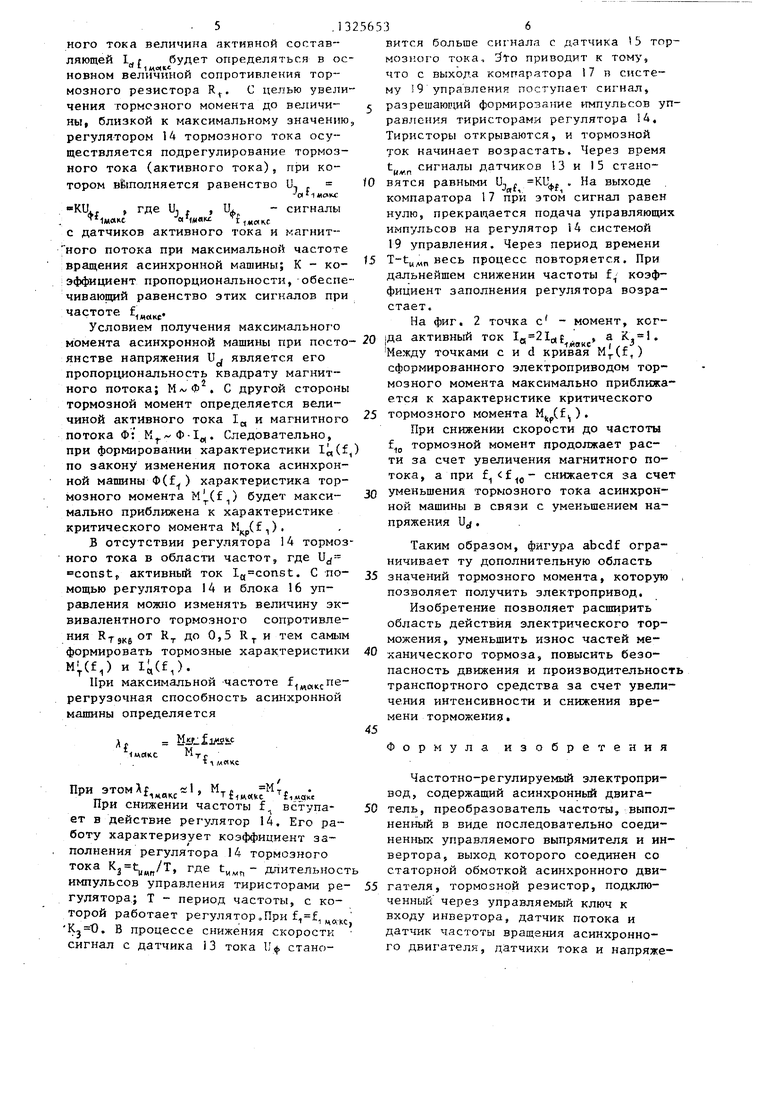
Предельная тормозная характеристика M-(f;i) и закон изменения напряжения на входе инвертора и магнитного потока в функции частоты U(j(f ) и Ф(.) изображены на фиг. 2 для случая, если регулятор 14 тормозного тока и блок 16 отсутствуют. Там же показана характеристика тормозного (активного) тока асинхронного двигателя 1 1д(), соответствукнцая закону изменения llj(f,) при тех же условиях.
На фиг. 2 изображена также характеристики электропривода при регули- ровании тормозного тока с помощью блоков 14 и 16: Ig(f) - тормозного TOKaj М ( ) - тормозного момента; Kj(f,) - коэффициента регулятора тормозного тока в функции частоты f.
30
значение при максимальной частоте ,
Для повышения эффективности торможения периодически включают тиристоры регулятора 14 тормозного тока с одновременной подачей продолжительного импульса на все три тиристора. При изменении длительности этих управляющих импульсов эквивалентное тормозное сопротивление R
тэкв
плавно меняется ot
величины RT (полного сопротивления 35 резистора 8) до величины, равной
0,5R при постоянно включенных тиристорах регулятора 14.
При этом на компараторе 17 бло- 40 ка 16 управления регулятором тормозного тока сравниваются два сигнала: с датчика 13 магнитного потока U и датчика 15 тормозного тока Ш. Каждый из этих сигналов характер изует 45 соответственно поток и активную составляющую общего тока асинхронного двигателя. Система управления электроприводом в зоне ограничения напряжения поддерживает равенство этих 50 составляющих. При этом формируется значение тормозного момента асинхронного двигателя 1, близкое к значению критического момента. Происходит это
спедуницим образом. При частоте ц,
Характеристика (f ) соответству- 55 , значение магнитного потока
Этому значению потока будет соответствовать определенное значение активного тока, В этой же точке при отсутствии регулятора 14 тормоэет характеристике критического момента асинхронной машины.
От частоты f 0 до ,j происходит ограничение магнитного потока
5
0
асиЕтхронного двигателя 1 , а на частотах от f,5 до f мкс ограничение по напряжению (асинхронного двигателя 1 или инвертора 2 напряжения), где f ,, - максимальная частота тока стаМЙКС
тора.
Величина сопротивления R тормозного резистора 8 определяется на основании соотношения
,у«о1КС
где - максимальное напряжение инвертора на входе; максимальный активный ток через тормозной резистор 8 при максимальной частоте вращения асинхронной машинь.
Максимальное значение тока ограничивается либо допускаемым током инвертора 2, либо наибольшей температурой резистора 8, либо величиной критичес1а
мак
oro момента, имеющего наименьшее
значение при максимальной частоте , повышения эффективности торожения периодически включают тиристоры регулятора 14 тормозного тока с одновременной подачей продолжительного импульса на все три тиристора. При изменении длительности этих управляющих импульсов эквивалентное тормозное сопротивление R
тэкв
плавно меняется ot
величины RT (полного сопротивления резистора 8) до величины, равной
0,5R при постоянно включенных тиристорах регулятора 14.
При этом на компараторе 17 бло- ка 16 управления регулятором тормозного тока сравниваются два сигнала: с датчика 13 магнитного потока U и датчика 15 тормозного тока Ш. Каждый из этих сигналов характер изует соответственно поток и активную составляющую общего тока асинхронного двигателя. Система управления электроприводом в зоне ограничения напряжения поддерживает равенство этих составляющих. При этом формируется значение тормозного момента асинхронного двигателя 1, близкое к значению критического момента. Происходит это
иого тока величина активной составляющей I.. f будет определяться в ос
° 1 ««хис
новном величиной сопротивления тормозного резистора R. С целью увели чения тормозного момента до величины, близкой к максимальному значению регулятором 14 тормозного тока осуществляется подрегулирование тормозного тока (активного тока), при котором вбшолняется равенство U
«Ки. , где Uj ,
1мс1« («яы;
- а шокс Цф - сигналы
I 1««М
с датчиков активного тока и агнит- ного потока при максимальной частоте вращения асинхронной машины; К - коэффициент пропорциональности, обеспечивающий равенство этих сигналов при
частоте
1Мс1ке
вится больше сигнала с датчика 5 тор моз1К)го тока, Зто приводит к тому, что с выхода компаратора 17 п систему 9 управления поступает сигнал, разрешаюищй формирование импульсов уп равления тиристорами регулятора 1Д, Тиристоры открываются, и тормозной ток начинает возрастать. Через время 4vn сигналы датчиков 13 и 15 становятся равными Uj J -КИф . На выходе , компаратора 17 при этом сигнал равен нулю, прекращается подача управляющих импульсов на регулятор 54 системой 19 управления. Через период времени весь процесс повторяется. При дальнейшем снижении частоты f коэффициент заполнения регулятора возрастает.
Условием получения максимального
На фиг. 2 точка с
момент.
ког- момента асинхронной машины при посто- 20 |Да активный ток , а К .
-.J -1|иоке ( , ..-.
Между точками с и а кривая Мт(.1, ) сформированного электроприводом тормозного момента максимально приближа ется к характеристике критического
янстве напряжения U является его пропорциональность квадрату магнитного потока; , С другой стороны тормозной момент определяется величиной активного тока 1д и магнитного потока Ф: К / -Ф-Хд. Следовательно, при формировании характеристики I(f по закону изменения потока асинхронной машины Ф() характеристика тормозного момента м.(.,) будет максимально приближена к характеристике критического момента М (f,).
В отсутствии регулятора 14 тормозного тока в области частот, где V constj активный ток l,const. С помощью регулятора 14 и блока 16 управления можно изменять величину эквивалентного тормозного сопротивления RT-JKB т Д 0 т сам1)Ш формировать тормозные характеристики
M;(f) и i;(f,).
При максимальной частоте .,д(.перегрузочная способность асинхронной машины определяется
,с
iwanc
MT
1 МИ«
MT MT.« ..,-.„. I t-f«n«vc Г1«акс
При снижении частоты f
При этом ,
вступает в действие регулятор 14, Его работу характеризует коэффициент заполнения регулятора 14 тормозного тока ,/Т, где t - д.пительность импульсов управления тиристорами регулятора; Т - период частоты, с которой работает регулятор,При ,., д.. . В процессе снижения скорости сигнал с датчика 13 тока V, стано
вится больше сигнала с датчика 5 тор- моз1К)го тока, Зто приводит к тому, что с выхода компаратора 17 п систему 9 управления поступает сигнал, разрешаюищй формирование импульсов управления тиристорами регулятора 1Д, Тиристоры открываются, и тормозной ток начинает возрастать. Через время 4vn сигналы датчиков 13 и 15 становятся равными Uj J -КИф . На выходе , компаратора 17 при этом сигнал равен нулю, прекращается подача управляющих импульсов на регулятор 54 системой 19 управления. Через период времени весь процесс повторяется. При дальнейшем снижении частоты f коэффициент заполнения регулятора возрастает.
На фиг. 2 точка с
момент.
активный ток , а К
ког- |Да активный ток , а К .
-.J -1|иоке ( , ..-.
Между точками с и а кривая Мт(.1, ) сформированного электроприводом тормозного момента максимально приближается к характеристике критического
тормозного момента ).
При снижении скорости до частоты f,u тормозной момент продолжает расти за счет увеличения магнитного потока, а при д- снижается за счет
уменьшения тормозного тока асинхронной машины в связи с уменьшением напряжения Uj.
Таким образом, фигура abcdf ограничивает ту дополнительную область значений тормозного момента, которую , позволяет получить электропривод.
Изобретение позволяет расширить область действия электрического торможения, уменьшить износ частей механического тормоза, повысить безопасность движения и производительность транспортного средства за счет увеличения интенсивности и снижения времени торможения.
Формула изобретения
Частотно-регулируемый электропривод, содержащий асинхронный двига50
тель, преобразователь частоты, выполненный в виде последовательно соединенных управляемого выпрямителя и инвертора, выход которого соединен со статорной обмоткой асинхронного дви- 55 гателя, тормозной резистор, подключенный через управляемый ключ к входу инвертора, датчик потока и датчик частоты вращения асинхронного двигателя, датчики тока и напряже
/13
ния в цепи питания асинхронного двигателя,- блоки управления выпрямителем и инвертором, сумматор, один вход которого соединен с датчиком частоты вращения асинхронного двигателя , другой - с выходом блока управления инвертором, а. выход сумматора связан с управляющим входом инвертора, выходы датчиков тока, напряжения, потока и частоты вращения подключены к соответствующим входам блока управления инвертором,- а входы блока управления выпрямителем соединены с выходами датчиков тока и напряжения, блок задания режимов работы, выходы которого соединены с управляющими входами блоков управления выпрямителем и инвертором и упомянутого ключа,- отличающийся тем, что, с целью повышения интенсивности и уменьшения времени торможения, введены регулятор тока торможе
3
8
ния, датчик тока торможения, включенный последовательно с резистором торможения, блок управления регулятором тока торможения, тормозной резистор выполнен со средним выводом, а блок задания режима работы снабжен дополнительным выходом, при этом регулятор тока торможения выполнен в виде трех тиристоров, аноды которых объединены И- соединены со средним выводом тормозного резистора, а катоды подключв - ны к выходам инвертора,- блок управления регулятором тока торможения составлен из последовательно соединенных компаратора, управляемого ключа и системы управления упомянутыми тнрнс- торами регулятора тока торможения, входы компаратора соединены с датчиком потока и датчиком тока торможения, а управляемый ключ соединен с дополнительным выходом блока падания режима работы.
Ud,Mr,
Ф,Wf
1а Та
///
/S- /
Х.
Ua UdMOKe
Г.Гербер
/W
Со :тавитель А.Головченко Техред Л.Сердюкова
Заказ 3122/53 Тираж 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-ЗЗу- Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул.. Проектная 4:
AMMt
Корректор Н.Король
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для торможения асинхронного электродвигателя | 1985 |
|
SU1343529A1 |
| Устройство для торможения асинхронного электродвигателя | 1985 |
|
SU1343530A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1985 |
|
SU1339850A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1601728A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1982 |
|
SU1241391A1 |
| Частотно-регулируемый электропривод с блоком торможения | 1982 |
|
SU1056411A1 |
| Частотно-регулируемый электропривод с блоком торможения | 1984 |
|
SU1229937A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Способ регулирования тормозного режима асинхронного тягового электропривода | 1974 |
|
SU506528A1 |
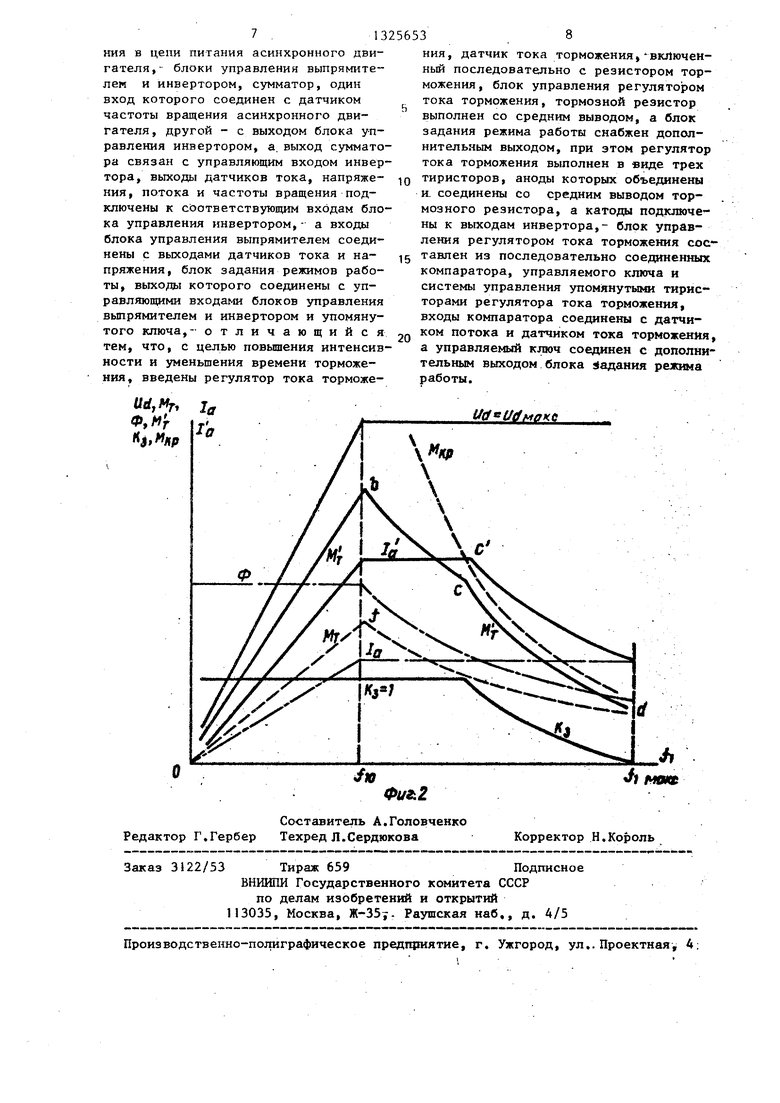
Изобретение относится к электротехнике и может быть использовано в различных областях промьшшенности, в частности на транспортных средствах. Целью изобретения является по- вьшение интенсивности и снижение времени торможения. Указанная цель достигается введением в частотно-регулируемый электропривод регулятора 14 тока торможения, датчика 15 тока торможения, блока 16 управления регулятором 14. Регулятор 14 включен между средним выводом резистора 8 торможения и выходом инвертора 2, а его управляющий вход соединен с выходом блока 16. Входы блока 16 подключены к выходам датчика 15, блока 10 задания режимов работы, датчика I3 потока и датчика 7 частоты вращения. Электропривод позволяет увеличить тормозное усилие во всем частотном диапазоне, уменьшить износ частей механического тормоза. 2 ил. г . t (П d to
| Датчик смещения | 1990 |
|
SU1763871A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для торможения частотнорегулируемого электропривода | 1976 |
|
SU661706A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Степанов А.Д | |||
| и др | |||
| Электрические передачи переменного тока тепловозов и гаэотурбоводов | |||
| - М.: Транспорт, 1982, с | |||
| Регулятор для ветряного двигателя в ветроэлектрических установках | 1921 |
|
SU136A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
