9
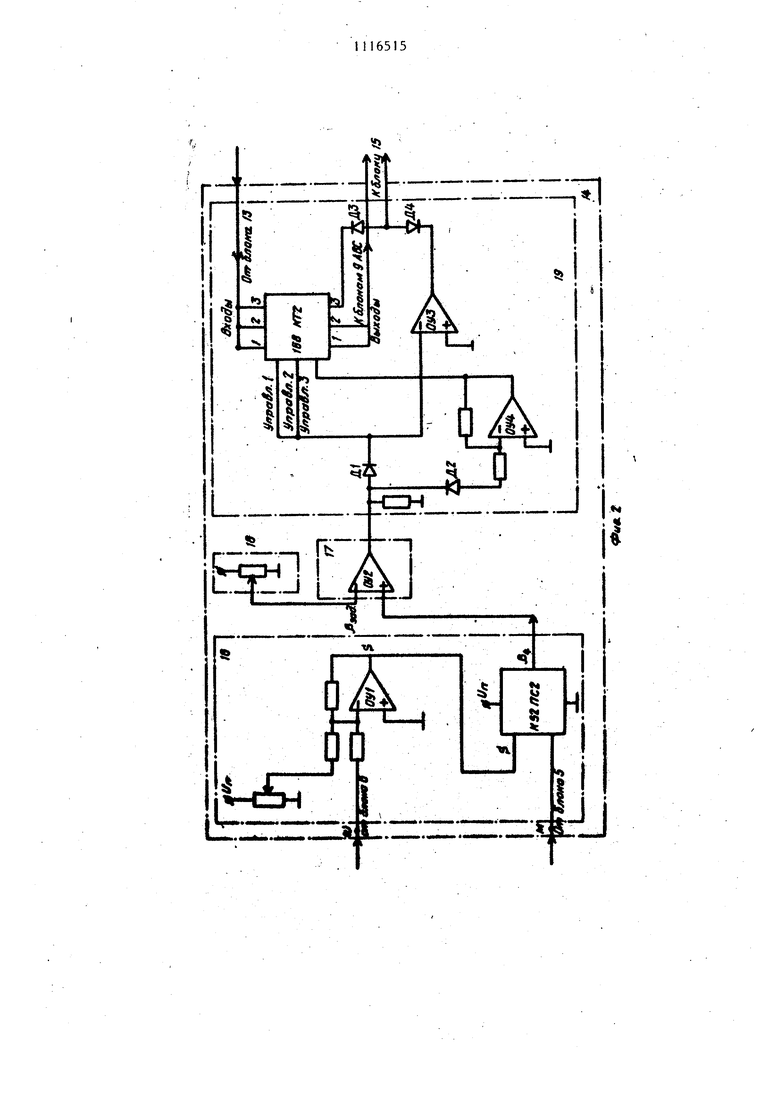
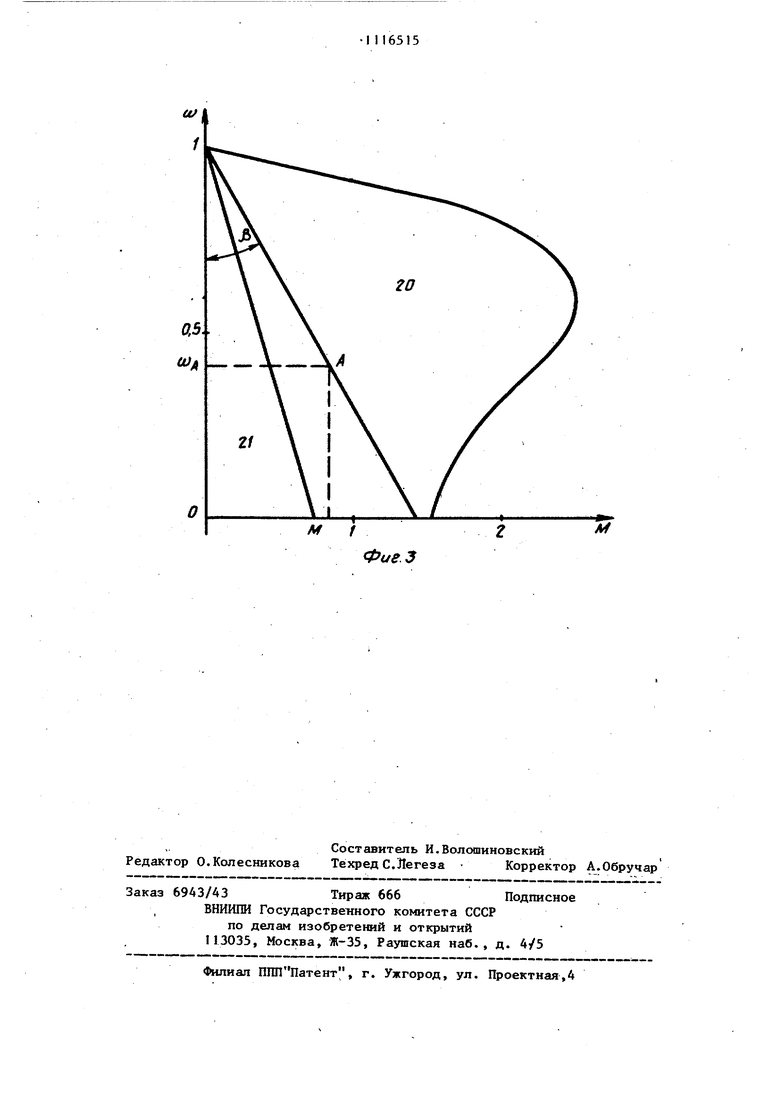
Jt Изобретение относится к электро технике и может быть использовано в электроприводах с реостатным регулированием скорости в цепи ротора, когда допустимо энергию скольжения выделять в виде тепловых потерь, например, в маломощных электроприводах. По основному авт.св. № 758453 известно устройство дпя регулирования скорости трехфазного асинхронног двигателя с фазным ротором, содержащее резисторы, соединенные звездой и подключенные к обмотка ротора, симисторы, подключенные параллельно резисторам, три блока импульсно-фазового управления, состоящие из посл довательно соединенных блока синхронизации, подключенного параллельно симисторам, генератора пилообразного напряжения, нуль-органа и формирователя импульсов, подключенного к упр ляющей- цепи симисторов, сумматор, од вход которого соединен с датчиком скорости двигателя , а другой - с бл ком задания, выход сумматора соедине с управляющими входами блоков импуль но-фазового управления через усилитель, в которое для повышения точнос ти регулирования .введен выпрямитель вход которого соединен с обмотками ротора, а выход подключен к генератору пилообразного напряжения tlJНедостатком известного устройств является ограниченный диапазон регулирования скорости вращения. Цель изобретения - расширение ди пазона регулирования скорости. Поставленная цель достигается тем, что в устройство для регулиров ния скорости трехфазного асинхронного двигателя с фазным ротором введен второй управляемый коммутатор, выполненный по схеме звезда на силовых управляемых вентилях, релейный блок блок переключения режима и блок конт роля момента, входы которого подключены к выводам обмоток статора и ротора, а выход - к первому входу блока переключения режима, второй вход которого соединен с выходом датчика скорости а третий вход соединен с выходом усилителя, один выход блока переключения режима соединен с входами фазосдвигающих блоков, а другой - с входом реЛейнего блока, выход которого соединен с управляющим входом введенного управляемого коммутатора, подключен ного в рассечку нулевой точки звезды резисторов в це.пи ротора. На фиг.1 представлена функциональная схема устройства электропривода; на фиг. 2 - блок переключения режима; на фиг. 3 - механическая характеристика электропривода. Электропривод содержит асинхронный двигатель 1 с фазным ротором, обмотки статора которого имеют выводы для подключения к источнику питания, а к выводам обмотки ротора подключены резисторы 2, соединенные в звезду, нулевая точка которой закорочена управляемым коммутатором 3, выполненным, например, на тиристорах или симисторах, второй управляемый коммутатор 4 также соединен в звезду, нулевая точка которой соединена, с нулевой точкой коммутатора 3, а выводы ее лучей подключены к выводам обмотки ротора. .Блок контроля момента 5 подключен с одной стороны к трем выводам обмотки, статора, а с другой - к jpeM выводам обмотки ротора. Датчик скорости 6 связан с валом асинхронного двигателя 1. К выводам обмотки ротора подключены блок синхронизации 7 и выпрямитель 8, выходы которых соединены с двумя входами каждого из трех фазосдвигаюших блоков 9 фаз А, В и С, выходы которых соединены соответственно с -входами формирователей импульсов 1-0 фаз А, В, С, выходы которых соединены с управляющими входами второго управляемого коммутатора 4. Блок задания скорости II соединен с одним входом сумматора I2, другой вход которого соединен с выходом датчика скорости 6, выход суммато- . ра через усилитель 13 соединен соотл ветственно с входом блока 14 переключения режима, первый вход которого соединен с выходом блока контроля момента 5, второй вход блока 14 соединен с выходом датчика скорости 6, один выход блока 14 соединен с соответствукяцими входами фазосдвнгающих блоков 9, а другой выход блока 14 соединен с входом релейного блока 15, выход которого соединен с управляющими входами введенного управляемого коммутатора 3. Блок 14 переключения режима (фиг. 2 содержит блок 16 вычисления текущего значения жесткости механической характеристики, один вход 3 которого соединен с выходом блока контроля момента 5, другой вход - с выходом датчика скорости 6, а выход блока 16 соединен с одним входо компаратора 17, другой вход которого соединен с потенциометром 18, выход компаратора 17 соединен с одн входом блока коммутации 19, другой вход которого соединен с выходом усилителя 13, а выходы блока 19 образуют выходы блока 14. Зоны работы 20 и 21 соответствуют двум режимам регулирования скорости вращения вала электропривода. Устройство для регулирования ско рости трехфазного асинхронного двигателя с фазным ротором работает следующим образом. В исходном состоянии питание в цепь статора не подается. Все блоки системы управления получают питание, и находятся в исходном состоя нии. В блоке 1А устанавливается вычисленное при наладке значение искусственной механической характеристики, определяемое полным сопротивлением резисторов 2. При подаче напряжения в обмотки статора асинхронного двигателя и отсутствии задающего напряжения фор мирователи импульсов 10 подают на второй тиристорный коммутатор 4 так товые импульсы, а на управляющие электроды коммутатора 3 подается не прерывный сигнал с релейного элемента 15, работу которого задает блок 13. В этом режиме электроприво работает не реостатной механической .характеристике,, определяемой величиной активного сопротивлений цепи ротора совместно с резисторами 2. Для работы на заданной скорости необходимо в блоке задания скорости П установить величину задающего напряжения, соответствукмдего выбран ной скорости. Это напряжение с опре деленным темпом нарастания подается на один вход сумматора 12, на другой вход которого подается напряжение обратной связи по скорости с датчика скорости 6. Разность напрядений, пропорциональная рассогласов нию скорости, подается на вход усилителя 13, с выхода которого уси ленное напряжение подается .на вход блока 14. В зависимости от текущего значения жесткости тек- блок 14 автоматически задает режиьш работы управляемых тиристорных ко Ф1утато154ров 3 и 4 и производит подключение усиленной разности напряжений к релейному блоку либо к управляющим входам фазосдвигающих блоков 9. При значении .тек jaeтирис-. торный коммутатор 3 постоянно включен, а второй тиристорный коммутатор 4 работает с фазоимпульсным управлением, причем усиленна разность напряжений задания и обратной связи по скорости подается из блока 14 на управляющие входы фазосдвигдющих блоков 9, а на вход релейного блока 15 подается сигнал с другого выхода блока 14, который держит релейный блок 15 постоянно включенным. При значении т«1с Pj,. коммутатор 3 проводится в режтгм импульсного управления, когда выход усилителя 13 подключен к входу релейного блока 5 и отключен от управляющих входов фазосдвигающих устройств, а на второй управляеи 1й коммутатор 4 подается только тактовые импульсы. При выходе электропривода на заданную скорость в зависимости от текущего значения жесткости разгон осуществляется вторым управляемым коммутатором 4, работающим как регулятор сопротивления в фазоимпульсном режиме,, либо-коммутатором 3, работающим как регулятор тока в импульсном режиме. В установившемся режиме электропривод работает в одной из зон регулирования, показанных на 4«г.З в зависимости от текущего значения жесткости Зтеу : в зоне 20 определяемой естественной механической характеристикой двигателя и искусствен-, ной с добавочным активным сопротивлением резисторов 2; в зоне 21 которая располагается между осью скоростей и искусс- венной механической характеристикой с резисторами 2 и в которой происходит импульсное регулирование скорости двигателя. Среднее значение момента при этом равно моменту сопротивления механизма. Этот режим работы осуществляется за счет управляемого коммутатора 3 и блоки управления, у которого в Этом случае работает блок задания 11, сумматор 12, датчик скорости 6, усилитель 13, блок контроля момента, блок 14 И релейный элемент 15. Блоки р1стем 1 импульсно-фазового управления находятся в пассивном состоя-, 5 НИИ, т.е. с выхода формирователей имггульсов 10 на второй управляекый коммутатор 4 приходят только тактовые импульсы, так как на управляющие входы фазосдвигающих блоков 9 не подается напряжение с усилителя С увеличением момента сопротивления и попадании его в зону 20 про исходит переключение в системе упра ления таким образом, что коммутатор оказывается постоянно включенным, а второй управляемый коммутатор 4 вместе с системой блоков импульснофазового управления обеспечит работ электропривода в режиме фазоимпульс ного управления, когда в зависимости от угла регулирования изменяется величина эквивалентного активного сопротивления цепи ротора и поддерживается заданная скорость. Работа блока 16, компаратора 17, потенциометра 18 и блок коммутации в общей системе электропривода осуществляется следующим образом. Аналоговый сигнал с датчика скорости 6, пропорциональный текущей частоте вращения W , преобразуется схемой апгебраического суммирования, собранной на операционном усил теле ОУ1 (блок 16) , в сигнал скольжения S по алгоритму W -i-fcco , где k ----- cons t; oj о Wo - синхронная частота вращения С выхода ОУ1 сигнал, пропорциональный скольжению S , подается на один из входов делителя (.микросхема К525ПС2). На второй вход подается аналоговый сигнал с блока 5, про порциональный моменту двигателя. С выхода делителя снимается сигнал, пропорциональный отношению . Вел чина этого сигнала . определяе жесткость механической характеристи электропривода в текущий момент вре мени - тек Для определения, в какой из зон находится рабочая точка А мехаличес характеристики электропривода, использован компаратор (.блок 17). Он сравнивает сигнал с выхода блока 16 156 с выходным сигналом Up,ja, блока 18, который определяет жесткость заданной граничной механической характеристики . При работе привода могут быть два варианта. Величина напряжения с блока 18 Uji: больше напряжения с блока , т.е. жесткость граничной характеристики больше жесткости рабочей характеристики. В этом случае электропривод работает в зоне 21 (фиг.З). С выхода блока 17 при этом снимается отрицательное напряжение, которое запирает диод На управляющих входах ключа (168КТ2 нулевое напряжение, что приводит к закрытию его выходных каналов. Поэтому напряжение от блока 13 не подается к блоку 9. Это исключает фазоимпульсный режим работы. В то же время напряжение с блока 17,приложенное к входу ОУ4 через диод Д2, инвертируется в сигнал положительной полярности и подается на третий управляющий вход ключа (168КТ2) . Третий канал ключа отпирается. Сигнал от блока 13 заставляет сработать блок 15, который выдает положительньй сигнал, и тиристорный коммутатор 3 включается. Это приводит к увеличению скорости, а значит и напряжения обратной связи с датчика скорости 6. Сигнал рассогласования уменьшается и при .определенном Unop minimuw блок 15 переключается. При этом тиристорный коймутатор ТК выключается. Скорость двигателя уменьшается, а сигнал рассогласования растет. При определенном блок I5 значении Unop.moximuw включается. Цикл работы повторяется. Таким образом осуществляется импульсное управление. В этом варианте с выхода ОУЗ снимается положительный сигнал, который запирает диод Д4. При втором варианте VftyK f,re.. т.е. жесткость граничной характеристики меньше жесткости рабочей характеристики, электропривод работает в этом случае в зоне 20. Использование в предложенном устройстве комбинированных режимов работы электропривода (импульсного и фазоимпульсного) обеспечивает регулирование скорости во всем первом квадранте.
Фиг t 380В «
Ш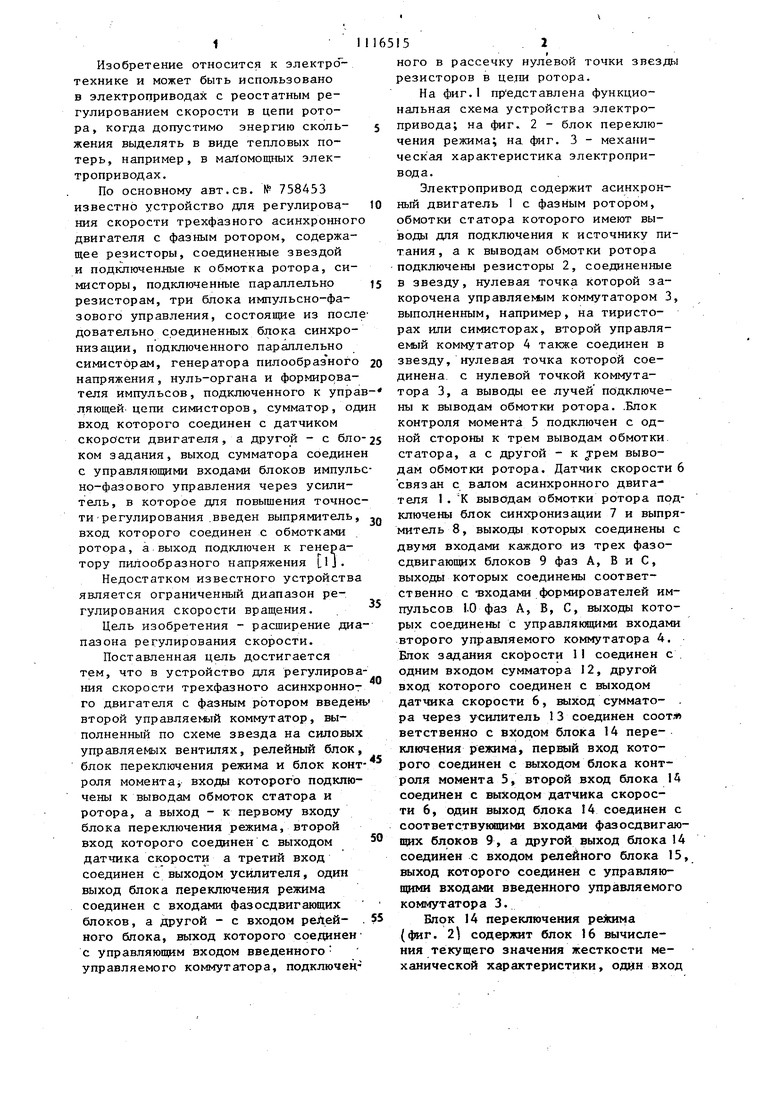
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для экстремального управления асинхронным электродвигателем | 1988 |
|
SU1653111A1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2014723C1 |
| Электропривод механизма передвижения крана | 1983 |
|
SU1104631A1 |
| Электропривод для грузоподъемного механизма | 1980 |
|
SU989719A2 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1981 |
|
SU1001410A1 |
| УСТРОЙСТВО ДЛЯ ПУСКА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1992 |
|
RU2064731C1 |
| Устройство для управления трехфазным асинхронным электродвигателем | 1973 |
|
SU520683A1 |
| Электропривод вентиляционной установки | 1985 |
|
SU1379927A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРО-ДИФФЕРЕНЦИАЛАМИ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794720C1 |
| ЧАСТОТНО-ФАЗОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2011 |
|
RU2510126C2 |
УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ТРЕХФАЗНОГО АСИНХРОННОГО .: ДШГАТЕЛЯ С ФАЗНЫМ РОТОРОМ по авт.св.: № 758453, с т л и ч a ю Щ е е с я i тем, что, с целью расширения диапазона регулирования скорости, в него, введены второй управляемый коммутатор, выполненный по схеме звезда , ца силовых управляемях вентилях, релейный блок, блок переключения режима и блок контроля момента, входы которого подключены к ш 1водам обмоток статора и ротора, a выходы - к первому входу блока переключения режима, второй вход которого соединен с выходом датчика скорости, a третий вход соединен с выходом усилителя, один выход блока переключения режима соединен с входами фазосдвигающих блоков a другой - с входом релейного блока, выход которого соединен с управляющим входом введенного управляемой) коммутатора, подg ключенного в рассечку нулевой точки сл звезды резисторов в цепи ротора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для регулирования скорости трехфазного асинхронного двигателя с фазным ротором | 1977 |
|
SU758453A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
