Изобретение относится к машиностроению и может быть использовано для обработки отверстий, например, растачиванием.
Целью изобретения является повышение точности (})()рмы отверстия за счет управ- /1ения точностью формы отверстия в нопе- речном сеченип без изменения режимов резания.
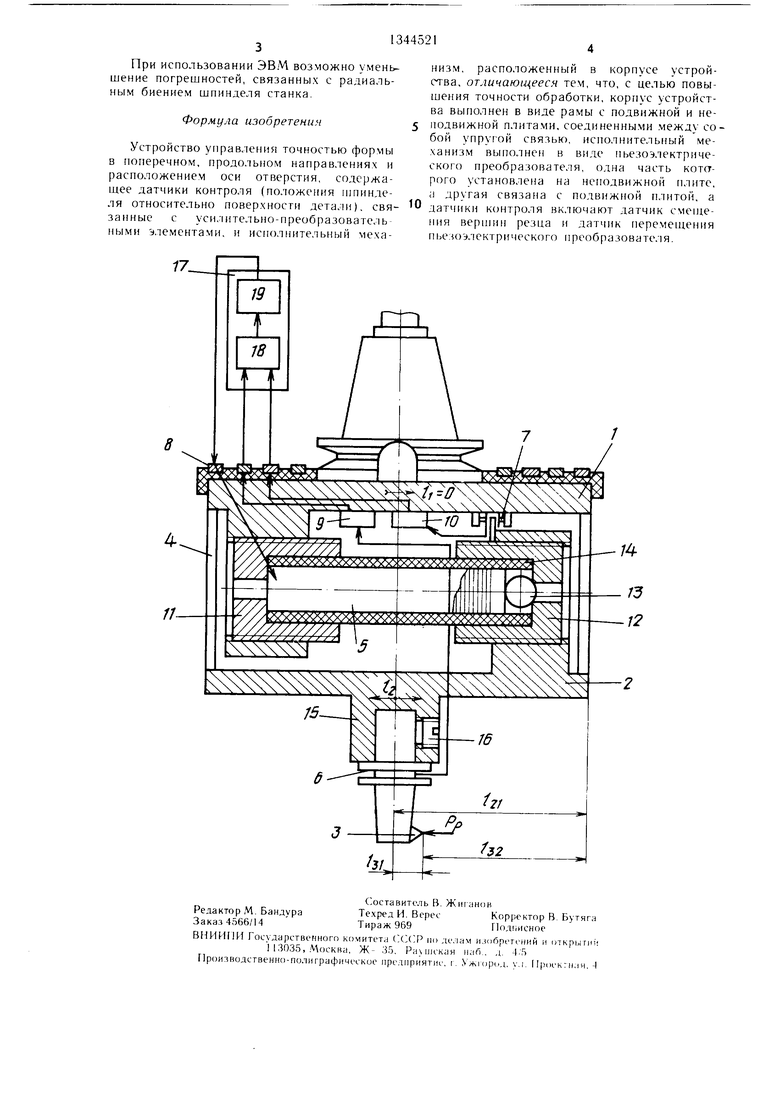
На чертеже изображено устройство управления точностью формы в поперечном, продольном направлениях и расположением оси огве)сгия.
с1|101 1сгво у 1равления точностью формы состоиг из корпуса, выполпепного в виде ра- М1)1 и двух пли 1 неподвижной 1 и подвижной
2.На подвижной плите 2 установлен резец
3.Подвижная плита 2 соединена с неподвижной ii. iirroii I через уп)угпе элементы 4. Между плитами 1 и 2 усганов.леп пьезо- у.1ектрическпй преобразователь 5 перемещения.
Устройство содержит датчик 6 смешения вер1пппы резца и датчик 7 перемещения |1ьезо-:1лектрического преобразователя 5.
Неп()Д и1жная н.тита 1 с присоединитель- пы.м конусом 50 с.лужит для закрепления стр(.йства в пп1ипделе станка. На ней ус- танов, 1ен вьнкхик нньи из диэлектрическогг) материала стакан с токосъемными кольцами S. кото)ые 1 лужат д, 1Я передачи электрических сигналов. На неподвижной п, 1ите 1 устр) расп(), 1агаются датчик 7 и преобразователи Я и И) сигналов датчиков. Неподвижная п. имеет перпепдикулярно расно,к)жен1П,1Й выступ с |)езьбовым отверстием, в которое ввинчивается стакан 11, кото)ого яв,1яе1ся неподвижной опорой пьезоэлектрического иреобразователя 5 перемещений. Подвижпая плита 2 имеет иден- тич1П11Й с неподвижной плитой выступ с резьбовым отверстием, в которое ввинчивается стакан 12, дно которого является подвижной оиорой преобразователя переме- щепий. Л.1Я иск.1ючеппя воз.можпого перекоса при установке преобразователя отно- сите, 1ьно опорных .хностей стакан 12 снабжен самоустанавливающейся опорой 13. Д, иск,1ючепия возможности замыкания уп- )ав,1яюп1его папряжения на корпус устройства пьезоэ.1ек1 рический преобразователь по- Menien в диэлектрический корпус 14. Резец .3 устапав. швается на неподвижной плите чере.з резцедержатель 15.
Pi 3en ,3 закрен.тяется винтом 16. При установке пье.зопреобразовате.тя в корпус устройства д,;1я устранения зазоров в сопряжениях с (.(порпыми поверхностями осуни ст- вляется предварительный натяг. Натяг зависит от величипь упругих деформаций эле- мептов 4 устройства, соедипяющих подвижную и неподвиж 1ую плиты устройства. Регулирование натяга осу|цествляется завин- чиваиием стаканов И и 12 с ноеледующей их (|)икс;| пией во избежание изменения их
5
5
положения в процессе работы устройства (фиксирующие винты не показаны).
Уетройство совместно с блоком формирования управляющего воздействия работает 5 следующим образом.
До начала процесса резания возмущающие воздействия отсутствуют и сигналы на вы.ходах нреобразователей 9 и 10 датчиков 6 и 7 равны нулю. С началом процесса ре0 зания появляется сила резания Р,,, под действием которой вершина резца 3 смещается от своего положения ггри наладке инструмента на размер. На выходе датчика 6, фиксирующего смеп1ение вершины резца в радиальном направлении, иоявляется сигнал, пропорциональный смещению вершины резца относительно плит 2 - ЛЕ,.. Этот сигна,1 преоб|:)азуется в блоке 9 и поступает в блок 17 формирования управляющего воздействия через токосьемники 8. Блок фор0 мирования управляющего воздействия имеет регулятор с устройством коррекции ди |ами- ческих свойств пьезоэлектрического пре(;б- разователя 18 и силовой преобразователь 19. При появлении сигпа,та па входе блока 17 формирования управляющего воздействия, который соответствует поя ;|епию сигна.ча на датчике 6, па выходе силово1-о преобразователя 19 появляется напряжение, нрикла- дываемое к пьезоэлектрическому преобразо- вате.чю 5, который из.меняет свою д,|ипу и перемещает управляемую .платформу с зак- ре11,1енным на ней инструментом в радиа.чь- ном направлении д(.-|, противопо.южном начальному смещению вер1пипы резца в ра- диа.тьном направлении под действием силы резания.
г Контроль отработки величины управляющего неремеп1ения плиты 2 относительно неподвижной плиты 1, закрепленной на Н1пинделе, осун;ествляется датчиком 7, сигнал на выходе которого пропорционален смещению платформы 1. Этот сигнал,
0 преобразованный в блоке 10. также поступает в блок 17 формирования управляющего воздействия. Нарастание управляю- niero папряжения, подаваемого на пьезоэлектрический преобразователь, и переме- ще)1ие плиты 2 иродолжаетея до тех пор, пока ее смещение в радиальном направлении от оси устройства не станет рав- }1ым но величине и противоположным по знаку смещению вершины резца Atia. При этом отклонение верщины резца относительно оси вращения шпинделя станка с установленным в нем устройством стремится к нулю.
At. ii Ati2+АЕ21- -0. Устройство позволяет уменьщить norpenj- ность формы в поперечном, продольном на5 правления.х, размер и расположение отверстий, обусловленные переменной твердостью обрабатываемого материала и неравномерностью припуска.
0
5
0
При использовании ЭВМ возможно уменьшение погрешностей, связанных с радиальным биением шнинделя станка.
Формула изобретения
Устройство у фавлершя точностью формы в поперечном, продольном направлениях и расположением оси отверстия, содержащее датчики контроля (положения п пинде- ля относительно поверхности детали), связанные с усилительно-преобразовательными э,1ементами, и исполнительный меха
низм, расположенный в корпусе устройства, отличающееся тем, что, с целью повышения точности обработки, корпус устройства выполнен в виде рамы с подвижной и неподвижной плитами, соединенными между собой упруг ой связью, исполнительный механизм вьпюлнен в виде пьезоэ,1ектриче- ского преобразователя, одна часть котсг- рого установлена на неподвижной плите, ;i другая связана с подвижной плитой, а датчики контроля вк,1ючают датчик смеп;е- ния вернпп резца и датчик перемещения пьезоэлектрического преобразовате.чя.
С-Оставитоль В. Ж танов
Редактор М. БандураТехред И. ВересКорректор В. Бутяга
Заказ 4566/14Тираж 969Подпясное
ВНИИГ1И Государственного комитета ( но делам изобрегеннй и открыги)
1 13035, Москва, Ж- 35. Ра и1ская наб,. д. 4:5 Г1рои: водственно-полнграфическое предприятие, i. Ужгорс.д. м. I роек; H.IH. 4
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СТОЙКОСТНЫХ ПАРАМЕТРОВ РЕЖУЩЕГО ИНСТРУМЕНТА | 2005 |
|
RU2298454C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ИЗНОШЕННЫХ ПОВЕРХНОСТЕЙ ЦИЛИНДРОВ, ТРУБ С ПОМОЩЬЮ НАНЕСЕНИЯ ПОКРЫТИЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2213653C2 |
| Устройство для контроля прочности образцов брикетов на срез | 1986 |
|
SU1401336A1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ГЕОМЕТРИЧЕСКОЙ ТОЧНОСТИ И РАЗМЕРНОЙ НАСТРОЙКИ ВЫСОКОТОЧНОГО МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1997 |
|
RU2116869C1 |
| Резцедержатель токарного станка | 1985 |
|
SU1337204A1 |
| НАСОСНАЯ СИСТЕМА | 2006 |
|
RU2318133C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛ РЕЗАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2082123C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВНУТРЕННИХ РЕЗЬБ | 2012 |
|
RU2521758C2 |
| Компенсационный стабилизатор давления | 1990 |
|
SU1753458A1 |
| Устройство для измерения перемещений резца относительно станины | 1974 |
|
SU568500A1 |
И:и.1бретение относится к машиностроению и может быть испо,-1ь:и)пан() д,1Я обработки oTHepCTiiii, например, растачиванием. Це.1ь и (обретения новьпиение точHOv-ти формы обрабатываемого отверстия ла сче: 11ра15.1ения точностью расно, 1оже ПИЯ OCI-: обрабатываемого отверстия и управ. 1еиия точностью формы отверстия 6e:f изменения pexanioii . Для этого ме- .аии;ш компенсации вьнюлиен в виде рамы бе. yi.ioB т|)ения и снабжен исно.шитель- ным механизмом 11еремен1енин. Исиолии- те.11,( ме.чани.чм выно.1неи в виде ньезо- :1лск грического 1 реобра:и)вате.1я и расположен в раме iiapa. i. ie.TbHcj состав. 1як)|цей си- 1Ы резания Р; и в НЛОСКОС1И дсм п твия си.1ы. Коми HciipyioHtee 11ереме1нен1;е ос в. 1не1ся в сторону, протиноно.южную де11- ( твию 1. ,1. ibi Р,.. I ил. со 4 4 сл ГчЭ