(54) УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ДАТЧИКОВ МАГНИТНОГО ПОЛЯ | 1969 |
|
SU234282A1 |
| Устройство для ориентирования датчиков магнитного поля | 1973 |
|
SU474605A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Устройство для ориентирования датчиков | 1979 |
|
SU781329A1 |
| Устройство для ориентирования датчиков | 1982 |
|
SU1102916A1 |
| Устройство для ориентирования датчиков магнитного поля | 1982 |
|
SU1089246A1 |
| Устройство для бесконтактной связи датчика на маятниковом блоке с каротажным кабелем | 1984 |
|
SU1182158A1 |
| Устройство для ориентирования преобразователей в скважине | 1978 |
|
SU732513A1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| Устройство для измерения искривления скважины | 1979 |
|
SU866149A1 |

1 ,
Изобретение относится к геофизическим исследованиям буровых скважин; особенно сверхглубоких, имеющих субвертикальную ориентировку, когда j требуется сохранить постоянное положение датчиков относительно плоскости наклона скважины, и может быть использовано для векторной магнитометрии скважин. Кроме того, в изоб- |Q ретении могут применяться датчики и другого назначения.
По основному авт. св. № 234282 известно устройство для ориентирования датчиков магнитного поля, пре- . имущественно феррозондового типа, в плоскости искривления скважины, содержащее самоустанавливающийся маятниковый блок с размещенными в нем датчиками и токоотводами и контакт ную пару коллектор-токосъемник. В этом устройстве с целью непрерывной передачи сигнала датчика на жилы кабеля и повышения точности ориентирования датчика в плос- 95 кости искривления скважины маятниковый блок выполнен в виде двух коаксиальных рамок - маятников, на внешней из которых установлен коллектор, а во внутренней - датчик.
электрически связаннЕ с коллекторами маломоментными спиральными токоотводами, взаимодействующими через жесткие контакты с корпусом внутренней и внешней рамок 1 .
Однако точность установки гравитационного маятникового ориентатора в заданном направлении, применяемого в указанном устройстве, зависит, при-прочих равных условиях, от момента вращения системы, т.е.
М Р-е- since, где Р - вес;
t - плечо;
а, - угол наклона оси вращения системы по отношению к вертикали .
При малых углах sin о становится малой величиной и момент вращения оказывается недостаточным, чтобы преодолеть силы трения. Происходит застой системы, т.е. появляется большая погрешность ориентировки. Как показывает практика, такое устройство обеспечивает надежную ориентировку при углах наклона от вертикали только больтае 3° , что ограничивает область его применения, особенно при изучении глубоких и
сверхглубоких скважин, которые стремятся Оурить вертикально и углы наклона составляют меньше .
Цель изобретения - повышение точности ориентирования при больших углах наклона системы.
Указанная цель достигается тем, что в известном устройстве ось вращения внутренней рамки расположена под углом к оси вращения внешней рамки, причем последняя закреплена на корпусе устройства посредством сильфонов. Это позволяет преодолеть мертвую зону почти от О до 3-4, где момент М очень мал, так как sin сх. меняется почти от О до 0,050,07.
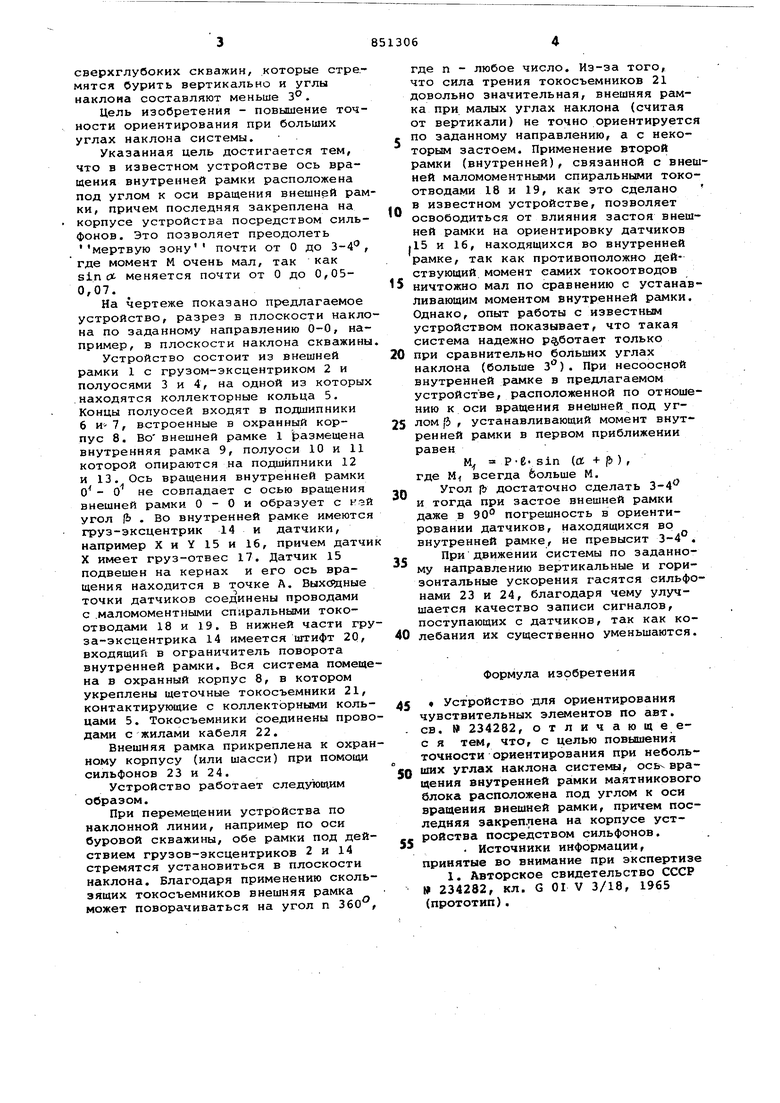
На чертеже показано предлагаемое устройство, разрез в плоскости наклона по заданному направлению 0-0, например, в плоскости наклона скважины
Устройство состоит из внешней рамки 1 с грузом-эксцентриком 2 и полуосями 3 и 4, на одной из которых .находятся коллекторные кольца 5. Концы полуосей входят в подшипники 6 И 7, встроенные в охранный корпус 8. Во внешней рамке 1 Ьазмещена внутренняя рамка 9, полуоси 10 и 11 которой опираются на подшипники 12 и 13, Ось вращения внутренней рамки О - О не совпадает с осью вращения внешней рамки О - О и образует с ней угол |Ь . Во внутренней рамке имеются груз-эксцентрик 14 и датчики, например Хи Y 15 и 16, причем датчи X имеет груз-отвес 17. Датчик 15 подвешен на кернах и его ось вращения находится в точке А. точки датчиков соединены проводами с .маломоментными спиральными токоотводами 18 и 19. В нижней части груза-эксцентрика 14 имеется штифт 20, входящий в ограничитель поворота внутренней рамки. Вся система помещена в охранный корпус 8, в котором укреплены щеточные токосъемники 21, контактирующие с коллекторными кольцами 5. Токосъемники соединены проводами с жилами кабеля 22.
Внешняя рамка прикреплена к охранному корпусу (или шасси) при помощи сильфонов 23 и 24.
Устройство работает следующим образом.
При перемещении устройства по наклонной линии, например по оси буровой скважины, обе рамки под действием грузов-эксцентриков 2 и 14 стремятся установиться в плоскости наклона. Благодаря применению скользящих токосъемников внешняя рамка может поворачиваться на угол п 360 ,
где п - любое число. Из-за того, что сила трения токосъемников 21 довольно значительная, внешняя рамка при малых углах наклона (считая от вертикали) не точно ориентируется по заданному направлению, а с некоторым застоем. Применение второй рамки (внутренней), связанной с внешней маломоментными спиральными токоотводами 18 и 19, как это сделано в известном устройстве, позволяет освободиться от влияния застоя внешней рамки на ориентировку датчиков .15 и 16, находящихся во внутренней рамке, так как противоположно действующий момент самих токоотводов
5 ничтожно мал по сравнению с устанавливающим моментом внутренней рамки. Однако, опыт работы с известным устройством показывает, что такая система надежно работает только
0 при сравнительно больших углах наклона (больше З). При несоосной внутренней в предлагаемом устройстве, расположенной по отношению к оси вращения внешней под углом fj , устанавливающий момент внут5ренней рамки в первом приближении равен
М Р-е- sin (tf + р ) , где MI всегда больше М,
Угол f достаточно сделать 3-4
D и тогда при застое внешней рамки даже в 90° погрешность в ориентировании датчиков, находящихся во внутренней рамке, не превысит 3-4 .
Придвижении системы по заданно5му направлению вертикальные и горизонтальные ускорения гасятся сильфонами 23 и 24, благодаря чему улучшается качество записи сигналов, поступающих с датчиков, так как ко0лебания их существенно уменьшаются.
Формула изрбретения
« Устройство для ориентирования
5 чувствительных элементов по авт. св. № 234282, отличающ е ес я тем, что, с целью повышения точности ориентирования при небольших углах наклона системы, ocbv вра0щения внутренней рамки маятникового блока расположена под углом к оси вращения внешней рамки, причем последняя закреплена на корпусе устройства посредством сильфонов.
5
. Источники информации, принятые во внимание при экспертизе
