11
Изобретение относится к автоматизации технологических процессов, выполненных с помощью автоматических манипуляторов, например резки, раз- метки, сварки, и может быть использовано при обработке изделий преимущественно в транспортном, химическом энергетическом машиностроении, например заготовок корпусов транспорт- ных средств, в которых должны быть выполнены круглые люки, проемы, ввар ка врезных элементов и т.п.
Цель изобретения - повышение точности обработки за счет автоматичес- кой коррекции установки оси траверсы в,центр контура.
Сущность изобретения заключается в автоматизации ориентации оси Т-образной траверсы с закрепленными на ее противоположных концах инструментом и датчиком контура. Ориентация производится посредством программного вывода Т-образной траверсы в зону контура с последующей коррекцией по- ложения ее оси по сигналу датчика контура.
На фиг.1 представлена схема осуществления способа обработки по круглому контуру; на фиг.2 - блок-схема устройства лдтя осуществления предлагаемого способа; на фиг.З - функциональная схема блока адаптации; на фиг.4 - функциональная схема блока программного управления.
Точка О (фиг.1) - центр круглого контура, точка П - фактическое положение оси траверсы после выведения траверсы в зону обработки, точка А - конец траверсы с укрепленным на ней инструментом, точка В - конец траверсы с укрепленным на ней датчиком контура. При равномерном нрашении тра-. версы вокруг собственной оси, например, против часовой стрелки сначала происходит захват датчиком контура линии контура и на его вькодс появляется сигнал знака отклонения траверсы относительно контура. С учетом знака отклонения производят коррекцию поло- жения оси транерсы перемещением ее либо в напр.1плении точки А, либо в направлении точки В. Примерный вид траектории перс мещения оси траверсы показан пунктирной линией (происходит асимптотическое приближение оси траверсы к цен гру контура) . Процесс коррекции положения оси траверсы завершается при получении от датчика поло072
жения траверсы относительно контура стабильного нулевого сигнала на участке линии контура заданной длины. После завершения коррекции осуществляют обработку контура вращением траверсы вокруг ее оси.
Устройство (фиг.2) содержит Т-образную траверсу 1, на одном конце которой размещен инструмент 2, а на противоположном конце - датчик 3 контура, приводы 4 и 5 линейных перемещений оси траверсы 1, привод 6 поворота траверсы 1 вокруг собственной оси, датчики 7 и 8 положения, датчик 9 угла поворота, блок 10 адаптации и блок 11 программного управления, первые три входа которого подключены к 1вь ходам датчиков 7 и 8 положения и датчика 9 угла поворота, первый вход блока 10 адаптации соединен с вьсходом датчика 3 положения траверсы относительно контура, второй, третий и четвертый входы блока 10 адаптации соединены соответственно с первым, вторым и третьи 4 выходами блока 1 1 программного управления, пятый вход блока 10 адаптации соединен с выходом датчика 9 угла поворота, первые . три, выхода блока 10 адаптации подклкг- чены соответственно к входам приводов 4 и 5 линейных перемещений и входу привода 6 поворота траверсы 1 вокруг собственной оси, а четвертый выход блока 10 адаптации соединен с четвертым входом блока 11 программного управления .
Блок 10 адаптации (фиг.З) содержит три коммутатора 12 - 14, три элемента И 15 - 17, два делителя 18 и 19 частоты, синусно-косинусный преобразователь 20, преобразователь 21 код - частота, первьп элемент ИЛИ 22, счетчик 23, первую схему 24 сравнения, первый регистр 25, сумматор 26, четвертый коммутатор 27, второй регистр 28 и четвертый элемент И 29, при этом выходы первого, второго и третьего коммутаторов 12 - 14 являются первыми тремя выходами б;:ока 10 адаптации, первый вход первого коммутатора 12 подключен к выходу первого делителя
18частоты, первый вход второго коммутатора 13 подключен к выходу второго делителя 19 частоты, первый вход третьего коммутатора 14 подключен к вторым входам обоих делителей 18 и
19частоты и к выходу четвертого элемента И 29, вторые входы коммутаторов
3
12-14 соединены соответстпенно с выходами первых трех элементов И 15 - 17, третьи входы коммутаторов 12-14 подключены к первому входу первого элемента ИЛИ 22 и являются третьим входом блока 10 адаптации. Первые входы первых трех элементов И 15-17 служат вторым входом блока 10 адаптации, вторые их входы соединены с пер- ю того элемента И 35, второй его вход
вым входом четвертого элемента И 29, с выходом преобразователя 21 код - частота и с первым входом счетчика 23, первые входы первого 18 и второго 19 делителей частоты соединены соот-- ветственно с первым и вторым выходами синусно-кооинусного преобразователя 20, вход которого является выходом сумматора 26. Первый вход сумматора 26 является пятым входом блока 10 адаптации, второй его вход подключен к выходу четвертого коммутатора 27, первый вход которого соединен с выхо20 ралления производится по его пятому оператором при включении устройства. При этом счетчик 37 адреса сбрасьшается по своему второму входу. По адресу, указанному счетчиком 37
дом второго регистра 28, второй его
вход соединен с корпусной шиной, тре- 25 адреса, блок 30 памяти по первым трем
тий и четвертый его входы совместно выходам указывает величины перемещес вторым входом первого элемента ИЛИ
22 образуют первый вход блока 10
адаптации. Вход преобразователя 21
код - частота служит четвертым входом 30 (позиционирование), по пятому выходу
НИИ по линейным координатам и углу поворота, по четвертому выходу дает команду на вывод в зону обработки
блока 10 адаптации, выход первого элемента ИЛИ 22 соединен с вторым входом счетчика 23, выход которого соединен с первым входом первой схемы 24 сравнения, второй вход первой схемы 24 сравнения соединен с выходо первого регистра 25, а ее выход подключен к второму входу четвертого элемента И 29 и служит четвертым выходом блока 10 адаптации.
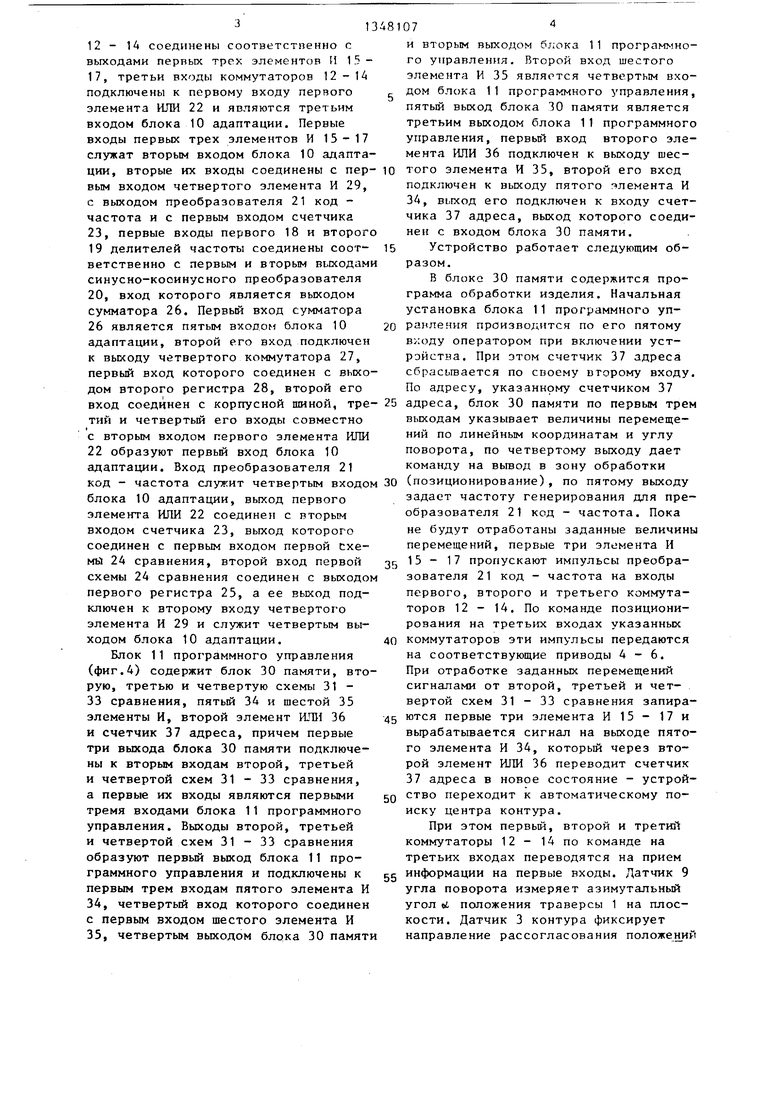
Блок 11 программного управления (фиг.4) содержит блок 30 памяти, вторую, третью и четвертую схемы 31 - 33 сравнения, пятый 34 и шестой 35 элементы И, второй элемент ИЛИ 36 и счетчик 37 адреса, причем первые три выхода блока 30 памяти подключены к вторым входам второй, третьей и четвертой схем 31-33 сравнения, а первые их входы являются первыми тремя входами блока 11 программного управления. Выходы второй, третьей и четвертой схем 31 - 33 сравнения образуют первый выход блока 11 программного управления и подключены к первым трем входам пятого элемента И
34,четвертый вход которого соединен с первым входом шестого элемента И
35,четвертым выходом блока 30 памят
8107
и вторым выходом 6j;oKa 1 1 программного управления. Второй вход шестого элемента И 35 является четвертым входом блока 11 программного управления, пятый выход блока 30 памяти является третьим выходом блока 11 программного управления, первый вход второго элемента ИЛИ 36 подключен к выходу шесподключен к вькоду пятого гчлемента И 34, вьгход его подключен к входу счетчика 37 адреса, выход которого соединен с входом блока 30 памяти.
Устройство работает следующим образом.
В блоке 30 памяти содержится программа обработки изделия. Начальная установка блока 11 программного упралления производится по его пятому оператором при включении устройства. При этом счетчик 37 адреса сбрасьшается по своему второму входу. По адресу, указанному счетчиком 37
НИИ по линейным координатам и углу поворота, по четвертому выходу дает команду на вывод в зону обработки
5
0
задает частоту генерирования для преобразователя 21 код - частота. Пока не будут отработаны заданные величины перемещений, первые три эльгмента И 15 - 17 пропускают импульсы преобразователя 21 код - частота на входы первого, второго и третьего коммутаторов 12 - 14. По команде позиционирования на TpeTbiix входах указанных коммутаторов эти импульсы передаются на соответствующие приводы 4-6. При отработке заданных перемещений сигналами от второй, третьей и четвертой схем 31-33 сравнения запираются первые три элемента И 15 - 17 и вырабатывается сигнал на выходе пятого элемента И 34, который через второй элемент ИЛИ 36 переводит счетчик 37 адреса в новое состояние - устройство переходит к автоматическому поиску центра контура.
При этом первый, второй и третий коммутаторы 12 - 14 по команде на третьих входах переводятся на прием g информации на первые входы. Датчик 9 угла поворота измеряет азимутальный угол «i положения траверсы 1 на плоскости. Датчик 3 контура фиксирует направление рассогласования положений
5
0
5 - 13
его самого и линии контура возбуткле- нием третьего или четвертого входов четвертого коммутатора 27 в зависимости от знака сигнала рассогласования Если датчик 3 контура находится в данный момент внутри контура, то на выход четвертого коммутатора 27 передается сигнал корпусной шины, а на выходе сумматора 26 присутствует сигнал угла oi. . Если датчик 3 контура находится вне контура, то на выход четвертого коммутатора 27 передается число Т из второго регистра 28, а на выходе сумматора 26 присутствует сигнал (), т.е. зеркальное о- ображе- ние угла о,.
Синусно-косинусный преобразователь 20 раскладывает значение угла на проекции, которые управ:1яют работой первого 18 и второго 19 делителей частоты. Первьм 18 и второй 19 делители частоты - счетчики с переменным коэффициентом деления, пропускающие им-. пульсы от преобразователя 21 код - частота через четвертьм элемент И 29 на первые входы первого 12 и второго 13 коммутаторов. На первый вход третьего коммутатора 14 поступают импульсы преобразователя 21 код - частота. Счетчик 23 при пози1шонировании удерживается в сброшенном состоянии по второму пходу от сигнала с третьего выхода блока 11 программного управления, поступающего через псрвьп вход первого элемента ИЛИ 22. При поиске центра контура этот сигнал снимается, счетчик 23 заполняется импульсами от преобразователя 21 код -} частота до совпадения с числом, находящимся в первом регистре 25. Сигнал с выхода первой схемы 24 сравнения запрещает дальнейшее поступление импульсов на приводы через четвертый элемент И 29 и переводит счетчик 37 адреса в новое состояние через шестой элемент И 35 и второй элемент ИЛИ 36. На этом поиск центра контура заканчивается; устройство приступает к осуществлению непосредственно обработки круглого контура. При этом уровень сигнала команды на четвертом выходе блока 30 памяти такой же, как и при позиционировании. Величины линейных перемещений не задаются. Четвертьй элемент И 29 открывается, так как сбрасывается счетчик 23. В результате траверса 1 своими концами описывает окружность с заданной угловой скоростью. Датчик 3 контура при этом в
81076
работе не участвует. Признак завершения обработки контура - совпадение чисел в четвертой схеме 33 сравнения. Затем по программе осуществляют пере- 5 ход к следующему круглому контуру.
Выполнение дополнительных операций при поиске центра контура позволяет скомпенсировать ошибки позиционирования оси траверсы и сформировать тра10
екторию перемещения инструмента с необходимой точность относитвпьно контура.
5
Формула изобретения 5
1 . Способ обработки по круглому контуру, при котором инструмент и датчик контура закрепляют на равном удалении по разнь.е стороны Т-образной
0 вращающейся траверсы, производят ввод траверсы в зону контура и в процессе обработки обход его инструментам, отличающийся тем, что, с целью повышения точности обработки за счет автоматическрй коррекции установки оси траверсы в центр контура, траверсу вращают до появления сигнала на датчике контура, измеряют угол поворота траверсы и знак отклонения поло0 женил траверсы относительно контура, перемещают траверсу по линии ее углового положения в направлении компенсации выявленного отклонения, указанные операции проводят до получения
5 стабильного нулевого сигнала отклонения па вькоде датчика положения траверсы относительно контура.
2. Устройство ;и1я обработки по
круглому контуру, содержащее Т-образную траверсу, на которой на равном расстоянии от ее оси вращения на одном конце укреплен инструмент, а на
другом - датчик контура, приво) поворота траверсы вокруг собственной оси,
снабженный датчиком угла поворота, приводы линейных перемещений оси траверсы, снабженные датчиками положеНИН, и блок программного управления, первые три входа которого подключены к выходам датчиков положения и датчика угла поворота, отличающееся тем, что, с целью повьшения точности обработки за счет автоматической коррекции установки оси траверсы в центр контура, в него дополнительно введен блок адаптации, : первый вход которого соединен с выхо7П
дом датчика контура, второй, третш и четвертый входы соединены соответственно с первым, вторым и третьим выходами блока программного управления, пятый вход соединен с выходом датчика угла поворота, первые три выхода подключены соответственно к входам приводов линейных перемещений оси траверсы и привода поворота траверсы вокруг собственной оси, а чет- вертый выход соединен с четвертьП входом блока программного управления причем блок адаптации содержит четьфе коммутатора, четьфе элемента И, два делителя частоты, синусно-косинусный преобразователь, преобразователь код- частота, элемент ИЛИ, счетчик, схему сравнения, два регистра, сут-гматор, выходы первого, второго и третьего коммутаторов являются первыми тремя выходами блока адаптации, первый вход первого коммутатора подключен к выходу первого делителя частоты, первьи вход второго коммутатора подключен к выходу второго делителя частоты, пер- вый вход третьего коммутатора подключен к вторым входам обоих делителей частоты и выходу четвертого элемента И, вторые входы названных коммутаторов соединены соответственно с выхо- дами первых трех элементов И, третьи входы ЭТ1ГК коммутаторов подключены к
78
первому входу элемента И ТО и являются третьим входом блока адапташ1и, первые входы первых трех элементов И являются вторым входом блокгЗ лдапта даи5 вторые их входы соединены с первым входом четвертого элемента И, с выходом преобразователя код - частота и с первым входом счетчика, первые входы первого и второго делителей частоты соединены соответственно с первым и вторым вьг одами синусно-ко- синусного преобразсвагеля, вход кото- poi o связан с выходом сумматора, первый вход сумматора является пятым входом блока адаптации, второй его вход подключен к выходу четвертого коммутаторау первый вход которого со- /единен с выходом второго регистра, второй вход соединен с корпусной шиной, третий и четвертьа входы совместно с вторым входом элемента ИЛИ образуют первьй вход блока адаптации, вход преобразователя код - частота является четвертым входом блока адаптации, выход элемента ИЛИ соединен с вторым входом счетчика, выход которого соединен с первым входом схемы сравнения, второй вход схемы сравнения соединен с выходом первого регистра, а ее выход подключен к второму входу четвертого элемента И и является четвертым выходом блока адаптации.
Фиг. 1
i: :: e-

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контроля процесса сварки | 1984 |
|
SU1238921A1 |
| Устройство для автоматического копирования линии сварного соединения | 1985 |
|
SU1318356A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| Синусно-косинусный преобразователь угла поворота вала в код | 1984 |
|
SU1223363A1 |
| Функциональный преобразователь угла поворота вала в код | 1982 |
|
SU1043704A1 |
| Преобразователь угла поворотаВАлА B КОд | 1980 |
|
SU842906A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Устройство для программного регулирования | 1979 |
|
SU930263A2 |
| Цифровой вольтметр | 1985 |
|
SU1337791A1 |
| Устройство для программного регулирования | 1977 |
|
SU732814A1 |


Изобретение относится к машиностроению и предназначено для автоматического ведения сварочного инструмента по линии круглого контура, подлежащего обработке. Изобретение позволяет повысить точность обработки за счет автоматической коррекции. Инструмент устанавливается на одном из концов Т-образной траверсы, на ее противоположном конце закрепляется датчик контура. Траверса снабжена приводом вращения и двумя приводами поступательного перемещения. Производится предварительная ориентация оси траверсы по центру обрабатьшае- мого контура. После этого траверсу вращают до появления сигнала на датчике контура. Одновременно производится измерение угла поворота траверсы и знака отклонения положения траверсы относительно контура. По полученным сигналам производится перемещение траверсы по линии ее углового полЪжения в направлении компенсации выявленного отклонения. Указанные операции проводятся до получения стабильного нулевого сигнала отклонения на выходе датчика положения траверсы относительно контура. Устройство содержит траверсу с инструментом и датчиком контура, привод ее поворота с датчиком угла поворота, приводы линейных перемещений оси траверсы с датчиками положения, блок программного управления и блок адаптации. 2 с.п. ф-лы, 4 ил. с 9 (Л 00 4; 00
t
CD
Редактор А.Огар
Составитель В.Грибова Техред А.Кравчук
Заказ 5149/12Тираж 969Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ФигЛ
Корректор М.Демчик
| Авторское свидетельство СССР 1189014, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
