Изобретение относится к области железнодорожной автоматики и может быть использовано в устройствах исключения проезда запрещающего маневрового светофора.
Цель изобретения - повышение достоверности контроля места нахождения локомотива.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается наличием новых элементов: ана- логоцифровым преобразователем, генератором, регистрами, счетчиками, компараторами, субтрактором, триггерами и их связями.
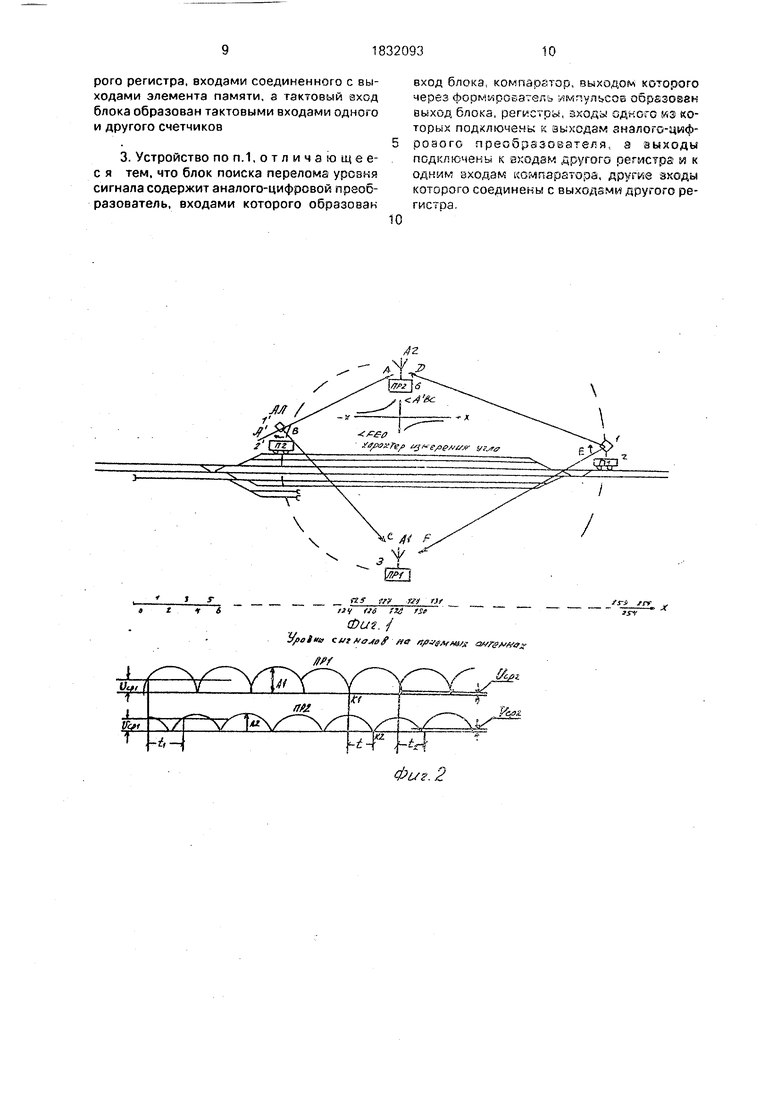
На фиг.1 представлен путевой план станции с расположением стационарных и возимых радиостанций; на фиг.2 - временная диаграмма сигналов на антеннах стационарных радиостанций: на фиг.З - схема устройства.
Перед описанием работы схемы в статическом состоянии и перечнем элементов предлагается описание принципа работы устройства.
Действие устройства основано на измерении угла между направлениями передачи
радиосигнала с маневрового локомотива посредством рамочной антенны на два стационарных приемника. Так, угол А ВС (фиг.1) характеризует удаление маневрового локомотива с передатчиком П2. а угол DEF - с передатчиком П1 от оси станции. Пунктирные линии на фиг.1 определяют точки, вершины углов при которых соответствуют величины углов ABC и DEF. Следовательно, продольная координата локомотива на путях станции будет определена не совсем точно. С увеличением расстоянии между приемниками ПР1 и ПР2 возрастает и точность определения продольной координаты локомотива. Однако, если угол ABC становится тупым, то дальнейшее увеличение угла приводит к снижению точности. Отсюда следует, что расстояние между приемниками ПР1 и ПР2 должно соответствовать расстоянию между .геометрическими центрами горловины. Определение угла А ВС может быть осуществлено путем отсчета интервала времени между моментом времени, когда направление передачи соответствовало приемнику ПР1, а затем - приемнику ПР2. Проще всего такой интервал можно определить посред
Ё
00
со ю о ю со
ством двух пороговых приемников посредством отсчета времени между их срабатыванием. Однако при разном уровне сигналов на входах приемников(фиг.2) интервал между моментами их срабатывания (ti и t2) будет завмсотъ от разности этих уровней {А1 и А2), а так же от порога срабатывания (Vcp.t и Vcp.2).
Для исключение влияния колебания уровней сигналов на приемных антеннах и порогов срабатывания целесообразно фиксировать направление передающей антенны на локомотиве, когда наступает перелом в изменении уровня сигнала на приемной антенне (снижение переходит в нарастание, точки КТи К2). Интервал времени ti, при стабильной частоте вращения локомотивной антенны и стабильной частоте генератора тактовой частоты приемника (на фиг.З генератор обозначен - G), будет зависить только от угла, который образован линиями указывающими направление с локомотивного передатчика на стационарные приемники.
Стабилизация вращения локомотивной антенны достигается путем закрепления маховика на вращающей части антенны. Для стабилизации частоты генератора стационарного устройства предусматривается кварцевый резонатор. Несмотря на упомянутую стабилизацию, могут возникнуть достаточно большие погрешности в определении интервала времени t (фиг.2) из-за колебания напряжения на двигателе вращения антенны, изменении вязкости смазки в редукторе двигателя и т.д. Поэтому необходимо синхронизировать вращение локомотивной антенны и стационарного таймера (генератор и делитель частоты). При значительном расхождении в работе упомянутых устройств. Формируется сигнал неисправность и устройство контроля места нахождения поезда исключается из работы.
Отсчет продольной координаты осуществляется от нечетного входного светофора (на фиг. 1 светофор не показан, но проставлены номера участков на оси 0-Х). Однако системным счетчиком предусмотрен отсчет нулевой координаты при проходе локомотивом оси станции (см. малую координатную сетку в верхней части фиг. 1).
Устройство определения координаты локомотива содержит блок поиска перелома уровня сигнала БППУС (7) (фиг.З) (фиксирует изменение с уменьшения на увеличение) с элементами: аналого-цифровым приемником АЦН1 (7.1), регистрами памяти RG3 (7.2) м RG3 (7.3). компаратором К (7,4) и формирователем логической единицы
.-.
10
15
20
25
по фронту FL11 (7.5). Второй блок является так же блоком поиска перелома уровня БППУС 2, но работает он по второму каналу и содержит аналогичные элементы АПП2
5 (7.1), RG 2(7.2) RG 4(7.3) К2 (7.4), FL 12(7.5|. Каждый из блоков работает соответственно от приемников ПР1 (4) и ПР2 (6) и от одного тактового генератора G (8), который определяет момент фиксации положения локомо- i тива. Следующим узлом является блок отсчета интервала времени между сигналами поступающими с первой А1 и второй А2 приемных антенн и коррекции работы таймера (таймер содержит генератор G и счетчик СТ1) в зависимости от скорости вращения локомотивной антенны (БОИВ) (9). Блок содержит счетчики СТ1 (9.1) и СТ2 (9.7), регистры памяти RG 5 (9.3) и RG 6(9.8),. логические элементы И1 (9,2) и И2 (9.4), триггер Т1 (9.6) и программируемое постоянное запоминающее устройство PROM (9.5). С выходом упомянутого узла соединен контроль- ный узел УК (10), который состоит из регистра памяти RG 7(10.1), субстрактора SUB (10.2), формирователя логической единицы FL 13 (10.3), логических элементов ИЗ (10.4), И4 (10.5). И5 (10.6), И6 (10.7), ИЛИ 7 (10.8), триггера фиксации неисправности Т2 (10.9), кнопки восстановления действия схеJ0 мы KB (10.11) и регистра R (10.10).
Кроме того, на фиг, 1 показаны антенны (1), (3), (5), передатчик (2) и приемники (4) и (6), блок отсчета интервала времени (БОИВ) 9, блок контроля (БК) 10, блок определения направления движения БОНД) 11. В статическом состоянии приемник ЛР1 (4) соеди- нем с входом АЦП1 (7.1), выход которого через регистры RG 1(7.2), RG 3(7.3), компаратор К (7.4) и формирователь FL 11 (7.5) соединен с входом сброса счетчика СТ1 (9.1), входом синхронизации регистра RG 5(9.3) и установочным входом триггера Т1 (9.6). Приемник ПР2 (6) через БППУС2 (7) соединен с входом сброса триггера Т1 (9.6). Генератор G (8) соединен с тактовыми входами счетчиков СТ1 (9.1) и СТ2 (9.7), Часть выходов счетчика СТ1 (9.1) соединена через регистр RG 5(9.3) с частью адресных входов ППЗУ (9.5), а вторая часть выходов СТ1 - через логические элементы 9,2 и 9.4 с входом логического элемента 10.8, Выхода триггера Т1 (9.6) соединен с входом сброса счетчика СТ2 (9.7). Синхровходами регистров RG 6(9.8) и RG7 (10.1), а также со входом формирователя FL 13 (10.3). Выход счетчика СТ2 (9.7) соединен со второй частью адресных входов ППЗУ (9.5) выходы которого через регистр RG 6(9.8)- с входом субтрактора SUB (10.2) и входом регистра RG 7(10.1), выход которого соединен с частью входов субтрэктора.
40
50
55
выходы которого через логические элементы (10.4), (10.5), (10.6), (10.7) и (10.8)соединен с триггерами Т2 (10.9) и ТЗ (11.1), выходы которого через логические элементы (11.3) и (11.4) соединены с триггерами Т4 (11.5), а ко вторым входам элементов (11.3) и (11.4) через элемент 11.2 подсоединены выходы регистра RG 6(9.8). К выходу сброса триггера Т2 (10.9) через регистр 10,10 подсоединен минусовой полюс источника питания (корпус), а через кнопку (10.11) - плюсовой (10712).
Действие схемы протекает следующим образом. Первый и второй блоки поиска перелома уровня БППУС1 (7) БППУС2 (7) определяют те моменты,.в которые спад уровня сигнала на приемных антеннах А1(3) и А2(5) (фиг.1) сменяется нарастанием (фиг.2, точки К1 и К2). Это изменение уровня сигнала происходит из-за вращения рамочкой антенны локомотива АЛ(1) (фиг,1). Фиксация уровня, происходит посредством приемников ПР1 (4) и ПР2 (6), выходы которых соединены соответственно с аналого- цифровым преобразователем АЦП1 (7.1) и АЦП2 (7.1)1. Сигнал с антенны принимается приемниками ПР (4 и 6) и преобразуется АЦП (7.1 и 7.11) в двоичный код. По фронту каждого импульса с генератора G (8) этот код записывается соответственно в первый RG 1(7.2) и второй RG 2(7.2) регистры, а прежнее содержимое этих регистров заносится соответственно в третий RG 3(7.3) и четвертый 4(7.3) регистры. Первый компаратор К1 (7.4) сравнизает содержимое регистров RG 1(7.2) и RG 3(7.3). В момент, когда начинается нарастание уровня сигнала на приемной антенне А1 (3), на выходе первого компаратора появляется логическая единица, что инициирует возникновение кратковременного импульса на выходе первого формирователя FL 11(7.6). Совершенно аналогично работает второй компаратор К2 (7.4) и второй формирователь FL 12 (7.5).
Итак, импульс на выходе формирователя FL 11(7.5) появляется при совпадении плоскости рамочной локомотивной а енны с направлением на первый приемт с ПР1 (4), а на выходе формирователя FL 12 - на второй приемник РП2 (6). Выходы формирователей соединены с входами триггера Т1 (9.6), обеспечивает понижение потенциала на выходе Q этого триггера во время поворота локомотивной антенны на угол образованный линиями FE и ED (фиг.1). В связи с тем, что поворот локомотивной антенны происходит не только из-за вращения двигателя и редуктора, но и за счет вращения локомотива относительно вертикальной оси при движении по кривым, следует предусмотреть такую скорость вращения антенны относительно ломокотива, которая была бы несоизмерима больше вращения локомотива относительно вертикальной оси при максимальной скорости передвижения и минимальном радиусе кривой.
Итак, интервал времени в течение которого понижен потенциал на выходе Q триггера Т1 (9.6), пропорциональный углу FED и
0 с некоторым допущением - продольной координате (области О, 1,2,3,4,5 ,6...124, 125, 126, 127, 128, 129, 130, 131...253, 254, 255). Этот интервал определяется счетчиком СТ2 (фиг.З), посредством отсчета импульсов с ге5 нератора G (8) в интервал времени, когда на входе этого счетчика отсутствует повышенный потенциал. Счетчик СТ1 (9.1) так же считает импульсы с генератора G (8), но продолжительность считывания составляет ин0 тервал времени, за который локомотивная антенна делает половину оборота. Так как скорость вращения антенны с течением времени может меняться, то и упомянутый интервал так же изменяется. Частота
5 генератора G (8) подобрана такой, чтобы на полоборота антенны счетчик СТ1 (9. отсчитал от 224 до 240 импульсов генератора G (8). При такой, ситуации на выходе логического элемента И1 (9.2) потенциал повышения
0 и с формирователя FL 11(7.5) через логический элемент И2 (9.4) не передается импульс о неисправности. Состояние выходов 1, 2, 4 и 8 счетчиков СТ1 (9.1) в момент появления фронта импульса и формирователя FL
5 11(9.5) фиксируется регистром 5(9.8). Этот регистр формирует полуадрес для программируемого постоянного запоминающего устройства PROM (9.5) (входы АО, А1, А2, A3), который соответствует фактической скоро0 сти вращения локомотивной антенны. При достаточно большом отклонении скорости вращения этой антенны от заданного значения посредством генератора G (6), счетчик СТ1 (9.1) и логических элементов И1 (9.2) и
5 И2 (9.4) формируется сигнал неисправности и устройство контроля координаты отключается. Второй полуадрес для запоминающего
устройства PROM Эвходы А4, А5А11), как
было упомянуто выше, определяется счетчи0 ком СТ2 (9.7). С учетом полного адреса (АО- А11) определяется состояние выходных шин запоминающего устройства PROM (выходы DOcrDO), которое фиксируется в регистре RG 6(9.8). На выходе этого регистра (Q1, Q25 Q8) в двоичном коде представлена продольная координата локомотива с учетом отклонения скорости вращения локомотивной антенны в допустимых пределах.
. Блок контроля БК(10) определяет, то что при очередном импульсе с генератора G (8)
(при очередном шаге опроса) положение локомотива изменилось не более чем на одну единицу. Такая проверка достигается тем, что содержимое регистров RG 6(9.6) и RG 7(10.1)(содержит информацию о координате локомотива при двух смежных шагах опроса) поступает на вход субтрактора SUB, где из предыдущей координаты места нахождения локомотива вычитается новая. Один из цифровых фильтров (логические элементы) ИЗ, И4, ЈЛ5), при изменении координаты локомотива не более чем на единицу, на своем выходе имеет пониженный потенциал, и исключает посредством логического элемента И6 (10.7) трансляцию импульса с формирователя FL 13(10.3) на вход логического элемента ИЛИ 7(10.8) и далее на вход S триггера Т 2(10.9). Формирователь FL 13(10,3) формирует импульс в момент окон- чания отсчета угла, когда плоскость рамки локомотивной антенны совпадает с направлением на стационарную антенну А2 (5) (фиг.1). Понижение потенциалов происходит на логических элементах И 3(10.4), И 4(10.5) И 4(10,6) соответственно при стоянке локомотива, движении в нечетном и движении в четном направлениях. Это понижение потенциала на элементах И 4(10.5) и И 5(10.6) устанавливает триггер Т 3(11.1) в соответствии с направлением движения. Если при этом локомотив был в районе оси станции, то на всех входах логического элемента ИЛИ 8(11.2) потенциал понижен, а на его всех выходах повышен. Это позволяет установить триггер Т 4(11.5) в положение, которое соответствует месту нахождения локомотива относительно станции (нечетная сторона НС, четная - ЧС). Отсутствие линии 1 на входе логического элемента ИЛИ 8(11,2) позволяет избежать ситуации, когда установка триггера 13 в новое положение происходит позже появления логических нулей на всех выходах регистра RG 6(9.8), что проведет к несвоевременному открытию логических элементов И 9(11.2) или И10 (11.3) для установки триггера (11.4) в надлежащее состояние.
Кнопка KB (10.11) позволяет установить триггер Т 2(10.9) в исходное положение после сбоя в работе схемы.
Итак, устройство контроля продольной координаты обеспечивает контроль за местом нахождения локомотива (на выходах УОВК 1К, 2К...8К появляется информация о координате местонахождения локомотива, на выходах УН НС, ЧС - о горловине), направлением движения (выходы УН НН и ЧН) и исправностью локомотивных и стационарных устройств (выход УН НИ).
В качестве элементов схемы предусматриваются следующие ИМС: АПП-К564ИР13 (схема АЦП приведена в 3 на стр.260), RG- 564ИР6 С4 стр. 249-252), СТ - 564ИЕ10 (4
стр. 231-232), К-564ИП2. Перечисленные элементы не обладают свойствами приборов первого класса надежности, а поэтому устройство должно быть продублировано и схемы совпадения должны определять достоверность работы устройства.
Аналитические исследования заявляемого устройства определения координаты локомотива показали, что по сравнению с прототипом заявляемое устройство обеспечивает контроль продольной координаты локомотива за счет чего может быть определено точное место нахождения (продольная и поперечная координаты) локомотива, и на . базе этого построено устройство исключения проезда маневрового запрещающего светофора.
Формула изобретения
1. Устройство для определения координаты локомотива, содержащее установленные на локомотиве передатчики и установленные на стационарном пункте приемники, блок контроля, блок определения направления движения и блок регистрации, отличающееся тем, что, с целью повышения достоверности, оно снабжено блоками поиска перелома уровня сигнала, генератором импульсов, блоком отсчета интервала времени, входами подключенными
к выходам блоков поиска перелома уровня сигнала, входы которого соединены с выходами приемников, тактовые входы - с выходами генератора, а выходы .- с входами блока контроля, выход которого подключен
к входу блока определения направления движения, выходом соединенного с блоком регистрации, причем выход генератора импульсов подключен к тактовым входам блока поиска перелома уровня сигнала.
2. Устройство поп.1,отличающее- с я тем, что блок отсчета времени содержит счетчики, элемент памяти, регистры, элементы И, триггер, входом которого образован один из входов блока, а выход
подключен к входу одного из счетчиков, выходы которого подключены к одним входам элемента памяти, другие входы которого соединены с выходами одного регистра, входами соединенного с одними выходами
.другого счетчика, другие выходы которого через первый элемент И соединены с одним из входов второго элемента И, другим входом которого образован вход блока, а выходом образован первый выход блока, другие выходы которого образованы выходом второго регистра, входами соединенного с выходами элемента памяти, а тактовый зхсд блока образован тактовыми входами одного и другого счетчиков
3. Устройство поп.1,отличающее- с я тем, что блок поиска перелома уровня сигнала содержит аналого-цифровой преобразователь, входами которого образован
вход блока, компаратор, выходом которого через формирователь импульсов образован выход блока, регистры, зходы одного из которых подключены к выходам аналого-цифрового преобразователя, а аыходы подключены к входам другого регистра и к одним входам компаратора, другие зходы которого соединены с выходами другого регистра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для приема на локомотиве информации с пути | 1990 |
|
SU1776597A1 |
| Устройство для регулирования скорости движения поезда | 1989 |
|
SU1787823A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ НА ПОДВИЖНЫЙ СОСТАВ | 1991 |
|
RU2027622C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТИ | 1991 |
|
RU2022854C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗАПОЛНЕНИЯ ПУТИ | 1991 |
|
RU2025357C1 |
| Устройство для контроля местоположения локомотива | 1990 |
|
SU1794765A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ МАНЕВРОВОГО ЛОКОМОТИВА | 1990 |
|
RU2026223C1 |
| Устройство для автоматической локомотивной сигнализации | 1990 |
|
SU1776596A1 |
| УСТРОЙСТВО КОНТРОЛЯ ОСВОБОЖДЕНИЯ ПЕРЕГОНА | 2004 |
|
RU2270123C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕДАЧЕЙ ДАННЫХ ПО РАДИОКАНАЛУ | 2004 |
|
RU2259017C1 |

Использование: в железнодорожной автоматике и может быть использовано в устройствах исключения проезда запрещающего маневрового светофора. Сущность изобретения: устройство содержит блок перегона уровня, блок поиска перелома уровня, тактовый генератор, блок контроля, передатчик, два приемника, блок отсчета интервала времени, блок определения направления движения. 1-2-7-9-1 От 11. Зил.
Г
6
fzs ffji aj )f
/г ч (is M tif
Фие. /
У/iotiia сигноле/ fta ар,чна/л ангемад
tiff
/
fri irf
-tA
Фиг. 2
L±-)
I
I
| Устройство для контроля прямолинейности направляющих рельсов | 1987 |
|
SU1482844A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
