Изобретение относится к области машиностроения и может быть использовано при со: данни роботизированных комплексов для автоматизации различных произЕЮдственных процессов.
Цель изобретении расширение функциональных и техно;101 ических возможностей устройства.
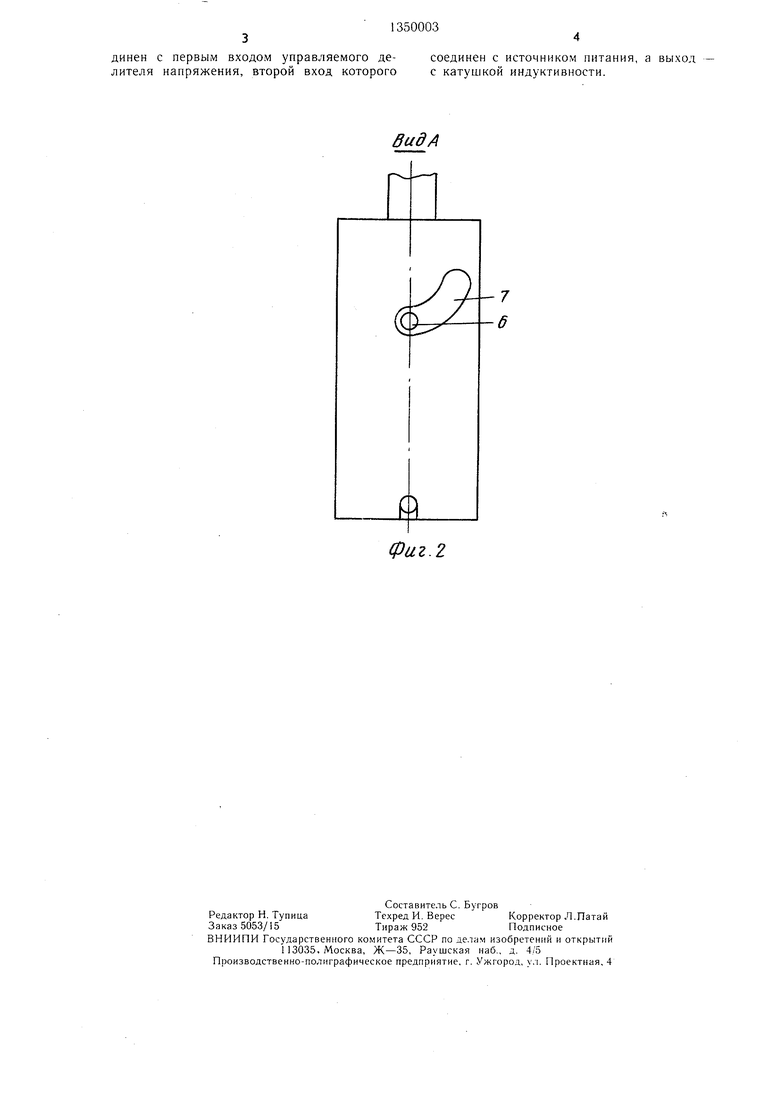
На фиг. 1 показан захват нром:э шлен- ного робота, поперечный разрез; на ф1г. 2 - вид А на фиг. 1.
Захват промышленного робота содержит цилиндрический корпус 1, спиральную пружину 2, электромагнит 3 с катушкой 4 индуктивности и сердечником 5, новодог: 6, фигурную прорезь 7 в корпусе, источника 8 питания, управляемый делитель 9 напряжения, задатчик 10 усилия сжатия, с.хему 11 сравнения, фазочувствительный вь.прями- тель 12, усилитель 13, генератор 14 П ;фемен- ного напряжения, магниточувстви1ельный элемент (например, феррозонд), 15.
Катушка 4 индуктивности электромагнита 3 закреплена внутри корпуса , а ее выводы подключены к выходу управляемого делителя 9 напряжения. Поводок 6 соединен с сердечником 5, а его выстуны в)одят в фигурную прорезь 7, выполненную в форме спирали.
Один конец пружины 2 прикреплен снизу к корпусу 1, а другой - к сердечнику 5. На ;говерхности сердечника 5, ной к катун1ке 4 индуктивности , установлен магниточувствительный элемент ;ферро- зонд) 15.
Захват промышлеи иш о робота работает следующим образом.
В исходном положении спиральная пружина 2 у;1ерживает сердечник 5 электромагнита 3 в крайнем нижнем положении. Захват разжат. При захвате объекта с определенным усилием сжатия захват переносится рукой робота и фиксируется }1ад объектом, установленным на рабочей позиции noc.fie этого захват опускается так, что объект свободно входит внутрь спиральной пружины 2. В этом исходном состоянии сигнал, снимаемый с выхода схемы 11 сравнения, равен максимальному значению, так как i-ia выходе фазочувствительного выпрямителя 12 напряжение равно нулю. Сигнал со схемы 1 1 сравнения подается на управляемый делитель 9 напряжения. На второй вхсд этого делите.чя подается напряжение с источника 8.
Делитель напряжения работает гак, что максимальному сигналу на его управляющем входе соответствует минимально: 5апря- жепие на выходе, которое подаете на катушку 4 индуктивности. При подаче напряжения на катунЕку 4 индуктивности сердечник 5 втягивается в нее. При перемещении сердечника 5 перемещается и поводок 6, поворачивая при этом и спиральную пружину 2. Пружина 2 поворачиваете;-; благодаря тому, что выстуны поводка 6 переме0
щаются (скользят) по спиральной прорези 7. При повороте пружина 2 скручивается и начинает зажимать объект. При перемещении сердечника 5 магнитное поле катуш- ки 4 индуктивности пересекает магниточувствительный элемент 15. С выхода последнего снимается напряжение, которое усиливается усилителем 13, вынрямляется фазочувстви- тельным выпрямителем 12 и подается на схему 1 сравнения.
В результате этого напряжение, снимае- .мое со схемы 11 сравнения, уменьшается, уменьшая тем самым и коэффициент деления делителя 9 напряжения. После этого напряжение на катушке 4 индуктивности
5 увеличивается, сердечник 5 при этом еще больще втягивается в катушку 4 индуктивности, уменыпая те.м самым расстояние между сердечником 5 и катушкой 4 индуктивности и увеличивая усилие зажима объекта. При уменьшении расстояния .между сер0 дечником 5 и катушкой индуктивности на- нряжение на выходе магниточувствительного элемента 15 увеличивается, а сигнал на выходе схемы 11 сравнения уменьшается. В результате этого на катушку 4 индуктив ности подается еще большее напряжение, а усилие зажима объекта еще больще увеличивается. Этот процесс продолжается до тех пор, пока не будет достигнута полная компенсация, т.е. когда значение напряжения на выходе фазочувствительного выпрямиQ теля 12 не достигнет уровня напряжения, снимаемого с задатчича 10 усилия сжатия. Предлагаемый зах1;ат позволяет осуществить взятие об ьекта любой формы с плавным регулированием усилия сжатия.
5Формула изобретения
Захват иромьиилеиного робота, содержащий корпус с установленным в нем электромагнитом, включающим в себя катушку индуктивности и сердечник, имеющие воЗмож0 ность взаимного перемещения, а также источник питания, отличающийся тем, что, с це- .чью расширения функциональных и технологических возможностей, он С)1абжен -спи- Р альной пружиной, установленной в корпусе, который выполнен в виде стакана со спиральной прорезью на его новерхиости, и жестко связанной одним концо.м с кор- liycoM, а другим - с поводком, расположенным в cns-гральной прорези и прикрепленным к сердечнику, на поверхности, обQ ращемной к к.зтунчке и1-:дуктивностн, которого установ..1(:н магниточувствнте 1ьный эле- м-сит, кату1лка ин;1укт1- вности прикреплена к 1; | - тренней торцовой поверхности корпуса, при этом вхс),ц. магниточувствительного элемента соед щеи с ген)атором перемен1К)го
5 1 апряжения, а выход через последовательно соединенные усилите,:гь и фазочувствительный выпрямите, 1ь связан с первым входом схелиз сравне-:П--;я, ее второй вход подключен к задатчику си. :,ия сжатия, а выход сое.5
динен с первым входом управляемого делителя напряжения, второй вход которого
соединен с источником питания, а выход с катушкой индуктивности.
ВидА
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1983 |
|
SU1090550A2 |
| ЗОНД ДЛЯ СКВАЖИННОГО ОПРЕДЕЛИТЕЛЯ МЕТАЛЛА | 1992 |
|
RU2051391C1 |
| Схват промышленного робота | 1984 |
|
SU1291389A1 |
| ВИБРАЦИОННАЯ ПЛОЩАДКА | 1969 |
|
SU255815A1 |
| Квазиуравновешенный мост для измерения параметров четырехэлементных RLC-двухполюсников | 1986 |
|
SU1404957A1 |
| ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ АКТИВНОСТИ ФЕРМЕНТОВ | 1971 |
|
SU312200A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1068723A1 |
| Адаптивный захватный модуль промышленного робота | 1989 |
|
SU1689063A1 |
| ИНДУКТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2310813C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ ЛИНЕЙНО ПРОТЯЖЕННЫХ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ | 2012 |
|
RU2490591C1 |
Изобретение относится к области машиностроения и может быть использовано в качестве захватного устройства промышленных роботов для манипулирования изделиями различных конфигурации и хрупкости. Целью изобретения является расширение функциональных и технологических возможностей устройства Захват промышленного робота содержит корпус 1 с закрепленным внутри него сердечником о с катушкой индуктивности 4, спиральную пружину 2 и поводок 6, которые размещены внутри корпуса 1, выполненного в виде стакана со спиральной прорезью, бесконтактный датчик усилия сжатия, выполненный в виде последовательно соединенных генератора 14, магниточувствительного элемента 15, усилителя 13 и фазочувствительного выпрямителя 12, а также задатчик усилия сжатия 10 и схему сравнения 11, один из входов которой подключен к фазочувствительному выпрямителю 12, другой - к задатчику усилия сжатия 10, а выход - через управляемый делитель напряжения 9 к катушке индуктивности 4. Делитель напряжения 9 гюд- ключен также к источнику питания 8. Зажим детали, помешаемой внутрь корпуса 1, осушествляется поредством закручивания спиральной пружины 2 при втягивании сердечника 5 в катушку 4. Усилие зажима контролируется магниточувствительным элементом 15 при приближении его к катушке 4 на то или иное расстояние и сравнивается в схеме 1 с заданным усилием. 2 ил. с Ф (Л с со от О о о со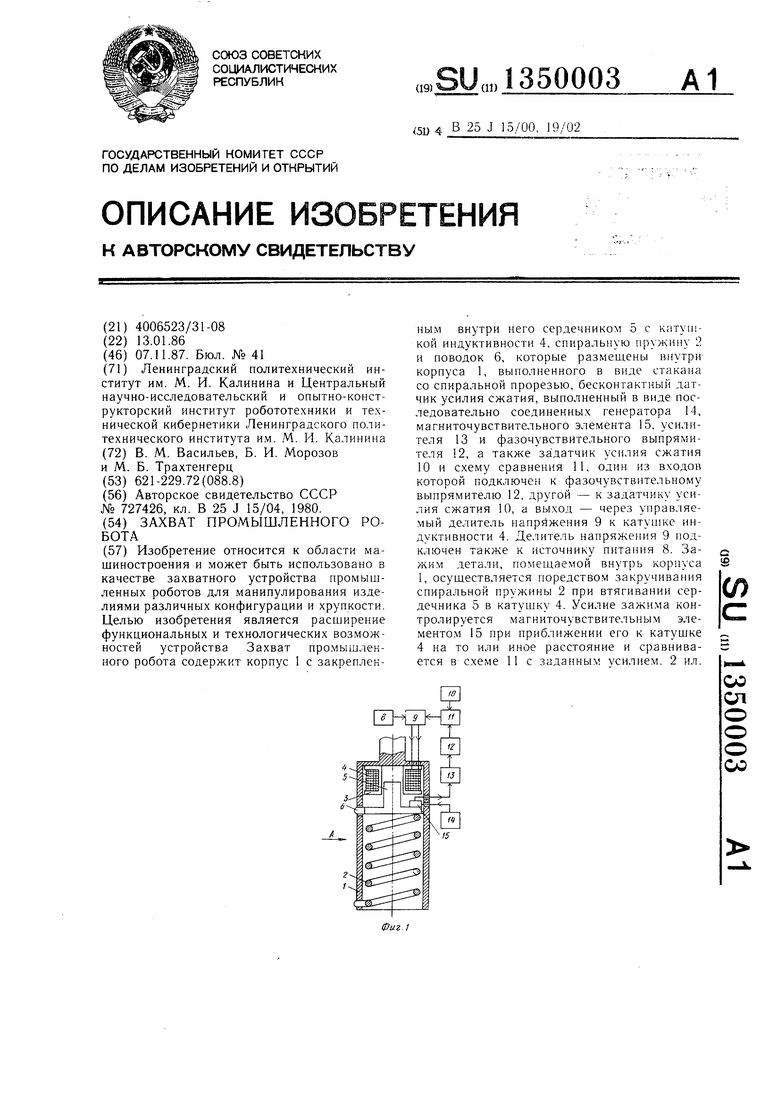
| Захват | 1978 |
|
SU727426A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
