Изобретение относится к робототехнике и предназначено для использования в конструкциях промышленных роботов и манипуляторов.
Цель изобретения - повышение надежности захвата объектов перемещения за счет применения автоматической системы регулирования усилия сжатия губок в зависимости от массы захватываемого объекта. На чертеже изображен захватный модуль.
Адаптивный захватный модуль состоит из механизма 1 сжатия губок схвата, привода 2 одностороннего действия сведения губок, подпружиненного относительно основания и механической связью 3 связанного с регулирующим элементом дросселя 4. Питание привода 2 осуществляется через распределители 5 и 6 и делитель давления, включающий дроссели 4 и 7. Выход делителя давления соединен с приводами 2 и 8. Шток привода 8 одностороннего действия оснащен зубчатой рейкой 9 и пилообразным профилем 10, во впадины которого входит упор 11, также выполненный в виде привода одностороннего действия. Зубчатая рейка 9 входит в зацепление с зубчатым колесом 12, жестко насаженным на вал пневматического задатчика 13 давления, выход которого соединен с одним из входов распределителя 6.
Привод 14 осуществляет ротацию схвата, т.е. поворот вокруг его продольной оси. Соединительная линия 15 распределителя 16, которая в исходном положении робота соединена с атмосферой, сопряжена также с управляющим устройством распределителя 6. Одна из губок схвата, например верхняя, оснащена дросселем 17 (выполненным в виде канала), который вместе с дросселем 18 образует делитель давления, и его выход соединен с входом упора 11.
Адаптивный захватный модуль работает следующим образом.
При поступлении команды от системы управления(не показана) на сведение губок схвата с помощью механизма 1 для зажатия объекта манипулирования распределители 5 и 6 находятся в положении I. Сжатый воздух с добавлением РП1 поступает на вход делителя давления, представленного дросселями 4 и 7, выход которого соединен с поршневой полостью привода 2. Если вес груза в схвате составляет промежуточное значение между минимальной и максимальной величинами, то привод 2, проворачиваясь относительно оси крепления, воздействует на запорно-регулирующий элемент дросселя 4 (уменьшает его проводимость), то в свою очередь приводит к увеличению давления в поршневой полости привода 2 и, следовательно, к перемещению поршня со штоком вправо и увеличению усилия зажатия объекта манипулирования.
Поскольку выход делителя давления одновременно соединен с поршневой полостью привода 8, то шток последнего переместится влево. При этом с помощью пары рейка 9 - зубчатое колесо 12 происходит
0 поворот и осевое перемещение винта задатчика 13 давления, в результате чего на его выходе устанавливается давление Рп2, пропорциональное давлению РП1. Так как одна из губок схвата оснащена дросселем 17, то
5 его проводимость при наличии в схвате объекта манипулирования близка к нулю, и, следовательно, шток упора 11 фиксирует положение штока привода 8.
Если движение схвата происходит в го0 ризонтальной или вертикальной плоскостях, то состояние системы не изменяется. Если приводом 14 осуществляется ротация захвата (механизм передачи вращения не показан), то распределитель 16 находится в
5 позиции II, т.е. давление питания подается не только в рабочую полость привода 14, но и на давление распределителем 6, который переключается в полицию II. Теперь давление питания Рп2 подается на вход делителя
0 давления - дроссели 4 и 7, обеспечивая давление в поршневой полости 2, причем величина этого давления такая же, как и при положении дросселя 4, когда на него воздействовал схват посредством механиче5 ской связи 3. Таким образом, постоянное давление в поршневой полости привода 2 при отсутствии ротации обеспечивается изменением проводимости дросселя 4, а при наличии ротации - изменением давления
0 питания до величины РП2, которое компенсирует открытие дросселя 4. При отсутствии команды на ротацию распределитель 16 занимает позицию I, давление в линии 15 управления распределителя 6 падает до
5 атмосферного и он переходит в позицию I, т.е. подключает питание РП1.
При переключении распределителя 5 в позицию II объект манипулирования освобождается от воздействия схвата, дроссель
0 17 резко увеличивает свою проводимость, давление в рабочей полости упора 11 падает, пружина возвращает шток в нижнее исходное положение, освобождая от фиксированного положения шток привода 8. Ра5 нее сжатая пружина возвращает его шток вправо и, тем самым, задатчик 13 возвращается в исходное состояние.
При следующем цикле взятия объекта манипулирования все описанное повторяется.
Формула изобретения Адаптивный захватный модуль промышленного робота, содержащий механизм сжатия зажимных губок, приводы этого механизма и механизма ротации схва- та, через распределители и дроссели,свя- занные с блоком подготовки воздуха, о т- л ичающийся тем, что, с целью повышения надежности захвата, модуль шарнирно закреплен на основании и подпружинен, а также снабжен системой автоматического регулирования усилия сжатия губок в зависимости от массы захватываемого объекта, состоящей из регулируемых дросселей, зада тчика давления с приводом и приводного упора, привод упора и привод задатчика
давления являются приводами одностороннего действия, кроме того,на конце штока привода задатчика давления выполнена зубчатая рейка, а в средней части штока
выполнены пилообразные зубья, взаимодействующие с приводным упором, зубчатая рейка кинематически связана с дополнительной шестерней, жестко установленной на оси задатчика давления, кроме того,модуль механически связан с одним из регулируемых дросселей, выход которого соединен с приводом задатчика давления, выход которого в свою очередь соединен с приводом механизма сжатия губок, а другой
дроссель установлен на одной из губок и его выход связан с приводным упором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Схват робота | 1990 |
|
SU1773716A1 |
| Захватное устройство промышленного робота | 1985 |
|
SU1313697A1 |
| Автооператор | 1982 |
|
SU1057237A1 |
| Адаптивное захватное устройство | 1986 |
|
SU1399114A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
Изобретение относится к робототехнике и предназначено для использования в конструкциях промышленных роботов и манипуляторов, Целью изобретения является повышение надежности захвата объектов перемещения за счет применения автома А ч тической системы регулирования усилия сжатия губок в зависимости от массы захватываемого объекта. Механизм 1 сжатия губок и его привод 2 выполнены на подпружиненном шарнирно закрепленном основании, имеющем механическую связь 3 с регулирующим элементом дросселя 4, соединенного с входом привода одностороннего действия задатчика давления 13. Шток задатчика 13 снабжен пилообразным профилем 10 и зубчатой рейкой 9, через зубчатое колесо 12 связанной с валом задатчика 13 давления. Выход задатчика 13 через распределитель 6 соединен с входом привода механизма 1 сжатия губок, в одной из которых расположен другой дроссель 17, связанный с входом упора 11. Упор 11 взаимодействуете пилообразным профилем 10 и выполнен в виде привода одностороннего действия. 1ил. - ё О 00 ю о о со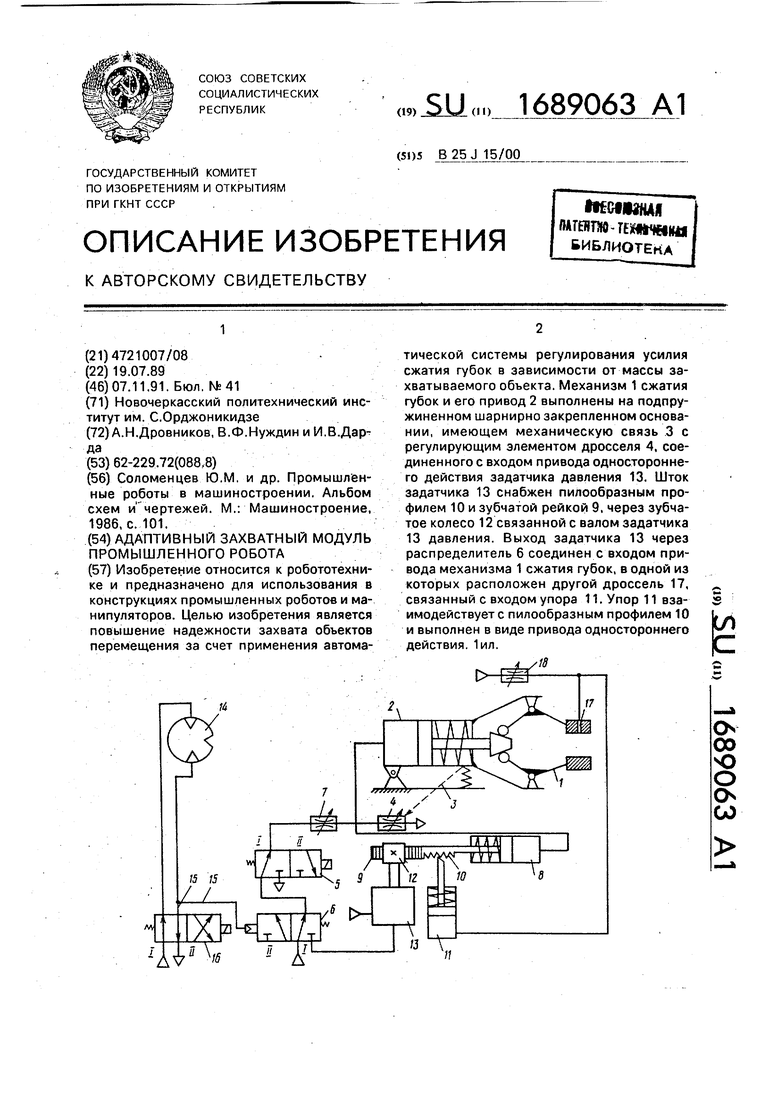

| Соломенцев Ю.М | |||
| и др | |||
| Промышленные роботы в машиностроении | |||
| Альбом схем и чертежей | |||
| М.: Машиностроение, 1986, с | |||
| Приспособление для записи звуковых явлений на светочувствительной поверхности | 1919 |
|
SU101A1 |
