113
Изобретение относится к медицинской технике и используется для задания физической нагрузки и измерения выполненной при этом работы
Целью изобретения является сокращение веса и габаритов, а также повьшюние точности дозирования нагрузки,,
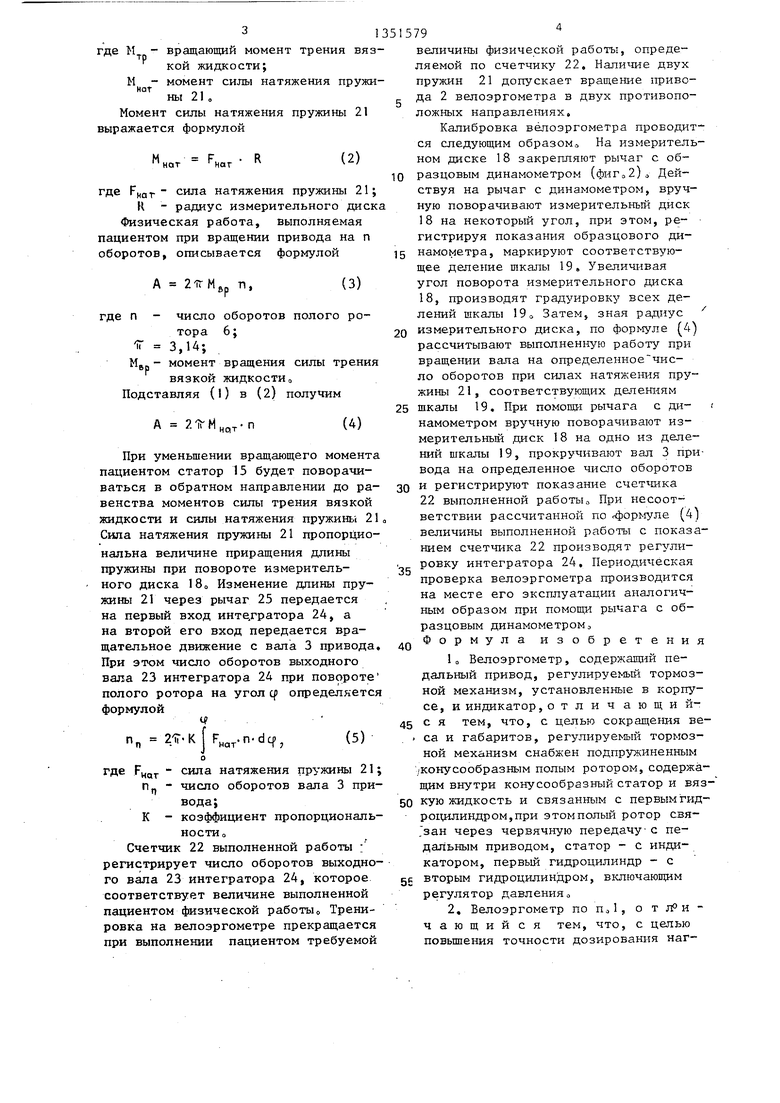
Иа фиго представлена кинемати- ческач схема велоэргометра; на фиг.2 измерительньш диск со шкалой при калибровке устройства
Велоэргометр содержит корпус 1, в котором установлен привод 2 с валом 3, на котором закреплен, червяк 4, взаимодействующий с червячным ко- лес ом 5, в котором одним концом установлен полый ротор 6 с возможностью осевого перемещения, причем между полым ротором6 и червячным колесом 5 установлена пружина 7 сжатия. Второй конец полого ротора 6 установлен на поршне 8 первого гидроцилиндра 9, соединенного трубопроводом 10 с вторым гидроцилиндром 11, имеющим поршень 12 с винтовым штоком 13 и маховиком 14, внутри полого ротора 6 установлен концентрично полый статор 15 с возможностью поворота вокруг своей оси, причем внутренняя боковая поверхность полого ротора 6 и наружная боковая поверхность статора 15 выполнены конусными, а рабочий зазор между ними заполнен вязкой жидкостью 17. Вал 16 статора 15 подвижно и герметично установлен в роторе 6 и соединен с измерительным диском 18 со шкалой 19, на котором закреплена гибкая нерастяжимая лента 20, конць которой соединены через пружины 21 с корпусом 1, счетчик 22 выполненной работы соединен с выходным валом 23 интегратора 24, один вход которого кинематически соединен с валом 3 привода, а другой через рычаги 25 соединен с пружинами 21 Интегратор 24 может быть выполнен по схемео
Велоэргометр работает следуюш 1м ,образомо
В зависимости от вида тренируемых конечностей устройство устанавливается и фиксируется струбцинами на полу или спинке кровати для вращения ногами либо - на подставке или стене для вращения руками К корпусу устройства могут быть прикреплены велосипедное сиденье и руль Задание нагрузки осуществляется пу5792
тем установки поршня 12 второго гидроцилиндра 11 в определенное положение с помощью маховика 14. При этом жидкость из второго гидроцилинд- ра 11 через трубопровод 10 подается в первый гидроцилиндр 9 и перемещает поршень 8 совместно с установленным на нем полым ротором 6 в положение, определяющее рабочий зазор между внутренней поверхностью полого ротора 6 и наружной боковой поверхностью статора 15„ При вращении маховика 14 в обратном направлении пружина 7 сжатия перемещает полый ротор
5 6, поршень 8 и жидкость по трубопроводу 10 также в обратном направлении Таким образом полый ротор 6 имеет возможность осевого перемещения, величина которого пропорциональна
0 рабочему ходу поршня 8 в первом гидроцилиндре 9 о При этом размер рабочего зазора между внутренней боковой поверхностью полого ротора 6 и наружной боковой поверхностью статора 15
изменяется, тем самым меняя величину нагрузки
Пациент располагается в удобном для работы положении и приводит в
движение привод; 2 Вращательное движение привода 2 через вал 3 привода, червяк 4 и червячное колесо 5 передается полому ротору 6, который за счет сил трения увлекает за собой
35 вязкую жидкость, находящуюся в рабочем зазоре При этом статор 13 с валом 16 поворачиваются вокруг своей оси На некоторый угол,, регистрируемый по шкале 19 измерительного
0 диска 18о Угловое перемещение статора 15 вызывается трением вязкой жидкости, находящейся в рабочем зазоре, при вращении полого ротора 6„ Повороту статора 15 препятствует момент 45 силы натяжения пружины 21, пропорциональный величине этого поворота. Требуемая нагрузка создается за счет трения в рабочем зазоре вязкой жид-, кости, увлекаемой вращающимся полым
50 ротором 6 о статор 15, причем величина нагрузки обратно пропорциональна размеру рабочего зазора. Статор 15 будет поворачиваться до тех пор, пока момент силы натяжения пружины 21
55
не станет/ равным моменту силы трения, .вращающей его. Тов. справедяивО| равенство
Мгр М„,,,
()
где М - вращающий момент трения вязкой жидкости;
М - момент силы натяжения пружины 2 1 „
Момент силы натяжения пружины 21 выражается формулой
F
Наг
(2)
где Рцат- сила натяжения пружины 21;
К - радиус измерительного диска Физическая работа, выполняемая пациентом при вращении привода на п оборотов, описывается формулой
А 21ГМ
вр
(3)
где п - число оборотов полого ротора 6; -ir 3,14; Mgp- момент вращения силы трения
вязкой жидкости о Подставляя () в (2) получим
А .1ГМ
нот
(4)
При уменьшении вращающего момента пациентом статор 15 будет поворачиваться в обратном направлении до равенства моментов силы трения вязкой жидкости и силы натяжения пружины 21 Сила натяжения пружины 21 пропорциональна величине приращения длины пружины при повороте измерительного диска 18о Изменение длины пружины 21 через рычаг 25 передается на первый вход инте,гратора 24, а на второй его вход передается вращательное движение с вала 3 привода, При этом число оборотов выходного вала 23 интегратора 24 при повороте полого ротора на угол cf определяется формулой
4 .
о ,,,.n.dcf, (5)
о
где Рцд - сила натяжения пружины 21; п - число оборотов вала 3 привода;
К - коэффициент пропорциональности о
Счетчик 22 выполненной работы : регистрирует число оборотов выходного вала 23 интегратора 24, которое соответствует величине выполненной пациентом физической работы Тренировка на велоэргометре прекращается при выполнении пациентом требуемой
10
15
351579
величины физической работы, определяемой по счетчику 22, Наличие двух пружин 21 допускает вращение 1триво- да 2 велоэргометра в двух противоположных направлениях.
Калибровка велоэргометра проводит- ся следующим образом На измерительном диске 18 закрепляют рычаг с образцовым динамометром (фиго 2)о Действуя на рычаг с динамометром, вручную поворачивают измерительный диск 18 на некоторый угол, при этом, регистрируя показания образцового динамометра, маркируют соответствующее деление шкалы 19, Увеличивая угол поворота измерительного диска 18, производят градуировку всех делений шкалы 19 о Затем, зная ра,циус 20 измерительного диска, по формуле (4) рассчитывают выполненную работу при вращении вала на определенное чис- ло оборотов при силах натяжения пружины 21, соответствующих делеш-гям 25 шкапы 19. При помощи рычага с ди- i намометром вручную поворачивают измерительный диск 18 на одно из делений шкалы 19, прокручивают вал 3 привода на определенное число оборотов и регистрируют показание счетчика 22 выполненной работыо При несоответствии рассчитанной по 4 ормуле (4) величины выполненной работы с показанием счетчика 22 производят регулировку интегратора 24, Периодическая проверка велоэргометра производится на месте его эксплуатации аналогичным образом при помощи рычага с образцовым динамометромо Формула изобретения
1 о Велоэргометр, содержащий педальный привод, регулируемый тормозной механизм, установленные в корпу30
35
40
се, и индикатор,отличающии45
с я тем, что, с целью сокращения ве- . са и габаритов, регулируемый тормозной механизм снабжен подпружиненным /конусообразным полым ротором, содержащим внутри конусообразный статор и вяз- 50 кую жидкость и связанным с первым гидроцилиндр ом, при этом полый ротор свя- зан через червячную передачу с педальным приводом, статор - с индикатором, первый гидроцилиндр - с вторым гидроцилиндром, включающим регулятор давления ,
2, Велоэргометр по пЛ, о т лРи - чающийся тем, что, с целью повьшения точности дозирования наг5Ё
51351579
рузки, он снабжен пружиной и дис- вода, и интегратором, входы которого ком, установленным на валу статора, связаны с колесом и пружиной, а вы- колесом, установленным на валу при- ход - через счетчик с индикатором.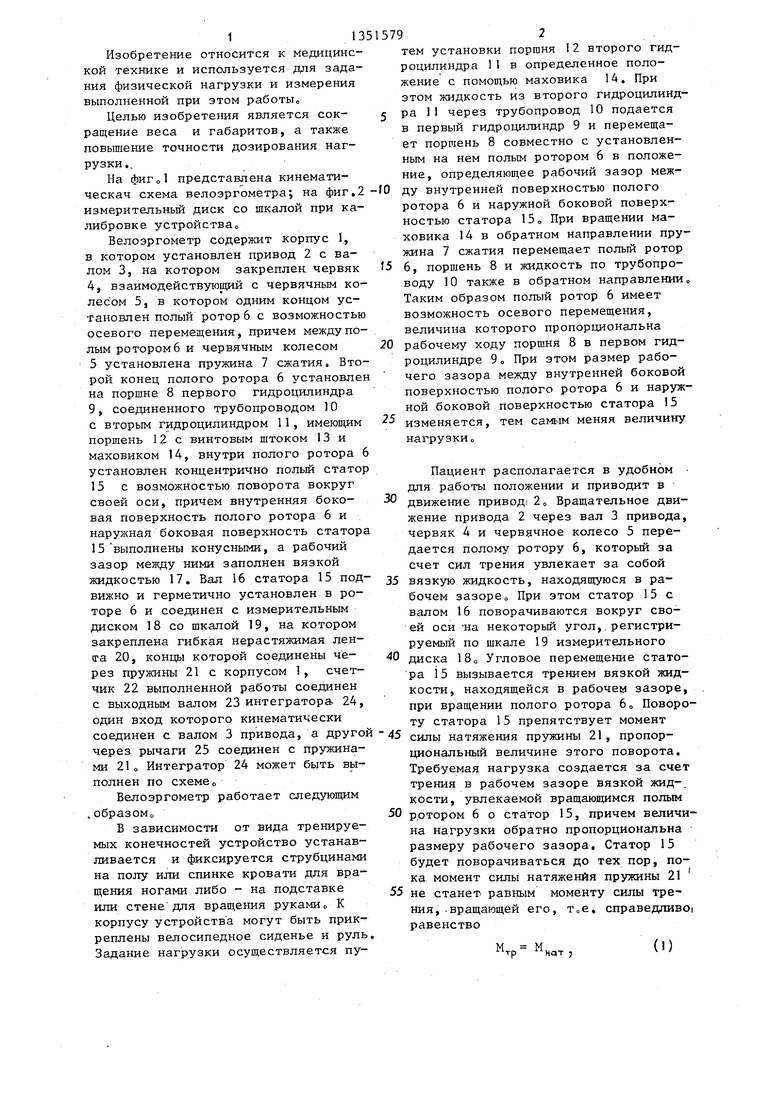
| название | год | авторы | номер документа |
|---|---|---|---|
| Ротационный вискозиметр | 1979 |
|
SU890148A1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ КАШЕВАРОВА "РДК-9" | 1995 |
|
RU2107174C1 |
| Станок для притирки резьбовых колец | 1944 |
|
SU67410A1 |
| Узел полива | 1986 |
|
SU1426657A1 |
| СТЕНД ДЛЯ ОБКАТКИ И ИСПЫТАНИЙ ГИДРАВЛИЧЕСКИХ ЗАБОЙНЫХ ДВИГАТЕЛЕЙ | 2003 |
|
RU2229581C1 |
| КАНАТОВЬЮЩАЯ МАШИНА | 2005 |
|
RU2299941C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОННЫЙ ДВУХРЕЖИМНЫЙ РАСХОДОМЕР | 2017 |
|
RU2658107C1 |
| РОТОРНЫЙ КОМПРЕССОР КАШЕВАРОВА "РКК-15" | 1996 |
|
RU2120064C1 |
| Устройство для намотки магнитопроводов | 1991 |
|
SU1804656A3 |
| Центрифуга | 1936 |
|
SU62104A1 |
Изобретение относится к медицинской технике. Цель изобретения - сокращение массы и габаритов, а также повьппение точности дозирования нагрузки о Велоэргометр содержит корпус, в котором установлен привод 2 с валом Зо Червяк 4 взаимодействует с червячным колесом 5. Внутри полого ротора 6 установлен полый статор 15„ Вал 16 статора 15 установлен в роторе 6 и соединен с измерительным диском 18 со шкалой. Счетчик 22 соединен с выходным валом 23 интегратора 24, вход которого через рычаги 25 соединен с пружинами 21. Наличие двух пружин 21 допускает вращение привода 2 в двух направлениях. По счетчику 22 определяют величину физической работы, вьшолненной пациентом 1 з.п. ф-лы, 2 ило i (Л со сд ел OS
20
777777777/7//////////
дзи&2
Редактор МоБандура
Составитель Ю.Порецкий Техред Л.Сердюкова
Заказ 5511/3Тираж 595.Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., До4/5
Производственно-полиграфическое предприятие, г„Ужгород, ул.Проектная,А
Корректор С.Б1екмар
| Кожевников СоН, Есиненок ЯоИ., Раскин | |||
| Механизмы | |||
| Мо: Машиностроение, 1976, с | |||
| АППАРАТ ДЛЯ ФОРМОВАНИЯ И УПЛОТНЕНИЯ ТОРФА, ГЛИНЫ И ДРУГИХ ПЛАСТИЧНЫХ МАТЕРИАЛОВ, ВЫПУСКАЕМЫХ ИЗ МУНДШТУКА НЕПРЕРЫВНОЙ ЛЕНТОЙ | 1922 |
|
SU609A1 |
| ВЕЛОТРЕНАЖЕР | 0 |
|
SU353730A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Эргометр | 1979 |
|
SU782811A1 |
| Авторское свидетельство СССР № 755278, кл„ А 61 Н 1/00, 1980, | |||
