(.Э
1
Изобретение относится к грузоподъемным устройствам.
Цель изобретения - расширение функциоЕшльных возможностей подъемника путем перемещения плиты относительно подвижной платформы.
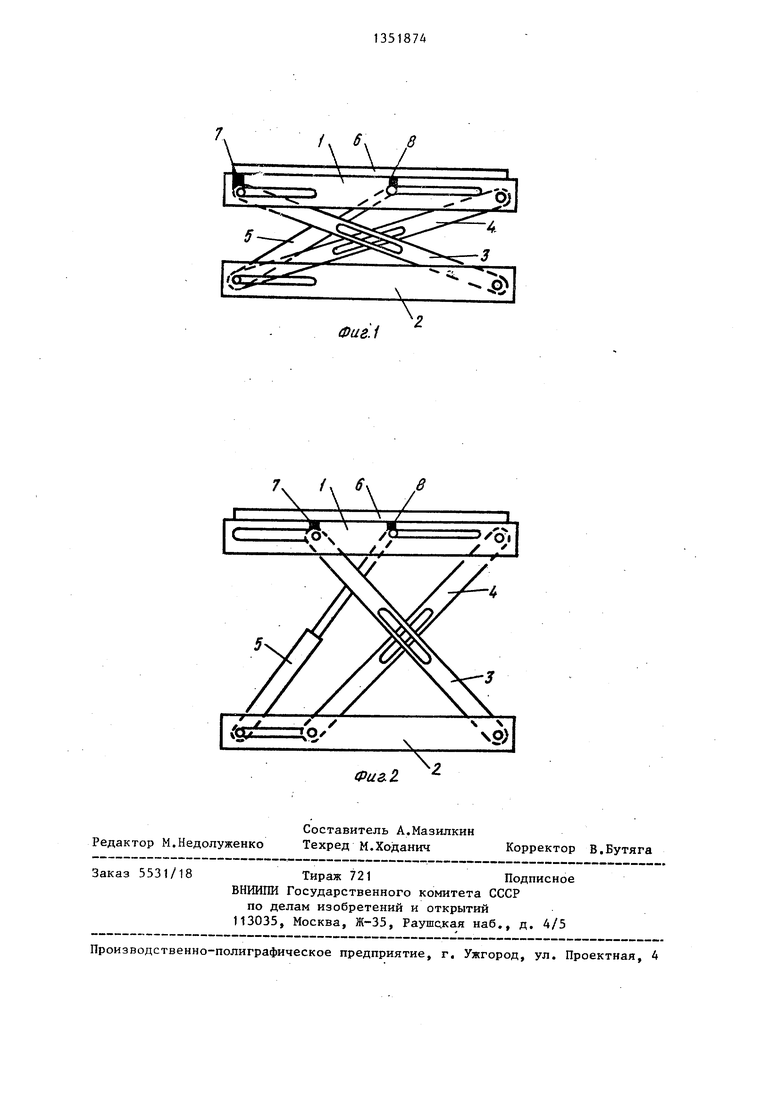
На фиг. 1 показан подъемник в нижнем положении; на фиг. 2 - подъемник в верхнем положении подвижной платформы, на фиг. 3 - подъемник с выдвинутой относительно подвижной платформы плитой.
Подъемник состоит из подвижной 1 и неподвижной 2 платформ, связанных между собой посредством шарниров двумя парами перекрещивающихся рычагов 3 и 4, образующих нюрнбергские ножницы. Между платформами 1 и 2 размещен привод 5, шток которого связан с подвижной платформой 1, а корпус - с неподвижной платформой 2 причем связь привода 5 с платформами 1 и 2 осуществляется посредством
шарниров. Подвижная платформа 1 пред- 25 требуемый момент времени прекратить
ставляет собой пустотелый каркас 1, в которой уложена плита 6, имеющая возможность перемещаться вдоль упомянутого каркаса. Это позволяет увеличивать (при выдвижении плиты 6) общую длину платформы 1. Обе платфомы 1 и 2 с одной стороны снабжены продольными пазами, в которые установлены шарниры смежных рычагов 3 и 4. Подвижная платформа 1 снабжена дополнительным продольным пазом, в котором размещен шарнир плиты 6. Этот паз является направляющей для плиты 6. Длиной этого паза определяется величина горизонтального перемещения плиты 6. Шарниры, расположенные в пазах подвижной платформы Снабжены стопорными устройствами 7 и 8, которые могут быть выполнены в виде механических, электромагнитных или иных фиксаторов. .
Принцип работы предлагаемого подъемника следующий,
В первоначальном положении подъеника (фиг. 1) все шарниры в пазах платформ 1 и 2 находятся в крайнем левом положении. Плита 6 также находится полностью на платформе 1. Одновременно с включением привода 5 включают стопорное устройство 8, фиксируя плиту 6 неподвижно относи- тельно платформы 1. При этом шток привода 5, упираясь в платформу 1, поднимает ее вверх. Это достигается
351874 , 2
за счет того (фиг, 2), что шарниры рычагов 3 и 4 перемещаются по продольным пазам платформы 1 и 2, что изменяет угол наклона рычагов 3 и 4, и они поднимают платформу 1 вверх. Максимальная высота подъема платфор
мы 1 достигается и тот момент, когда шарниры рычагов 3 и 4 займут крайнее правое положение в пазах платформы 1 и 2.. Движ€ ние платформы 1 происходило только в вертикальной плоскости. Если отключить стопорное устройство 8, шток привода 5, упираясь в плиту 6, смещает ее в горизонтальной плоскости. Максимальный размер выдвижения плиты 6,из платформы 1 достигается в тот момент, когда шарнир в пазе займет также крайнее правое положение. При этом движение плиты 6 происходит только в горизонтальной плоскости. Регулированием стопорных устройств 7 и 8 (их включение-выключение) можно в любой
5
0
о
5
0
вертикальный подъем (опускание) платформы I и начать горизон- . тальное вьдвижение (втягивание)пли- ты 6.
Формула изобретения
Подъемник, содержащий подвижную и неподвижную платформы, связанные между собой двумя парами перекрещивающихся шарнирных рычагов типа нюрнбергских ножниц, один верхний и один нижний концы которых смонтированы с возможностью поступательного перемещения по горизонтальным направляющим, выполненным в подвижной и неподвижной платформах соответственно, привод .подъема подвижной плат формы, выполненный в виде корцуса с выдвижным штоком и соединенный концами шарнирно с подвижной и неподвижной платформами, отличающий- с я тем, что, с целью расширения функциональных возможностей, на подвижной платформе с возможностью горизонтального перемещения и фиксации относительно нее стопорным устройством смонтиров ана плита, шарнирно связанная с верхним концом привода, а верхний конец одного рычага снабжен дополнительнь1м стопорньм устройством для фиксации его относительно направляющей подвижной платформы „
Фаг.1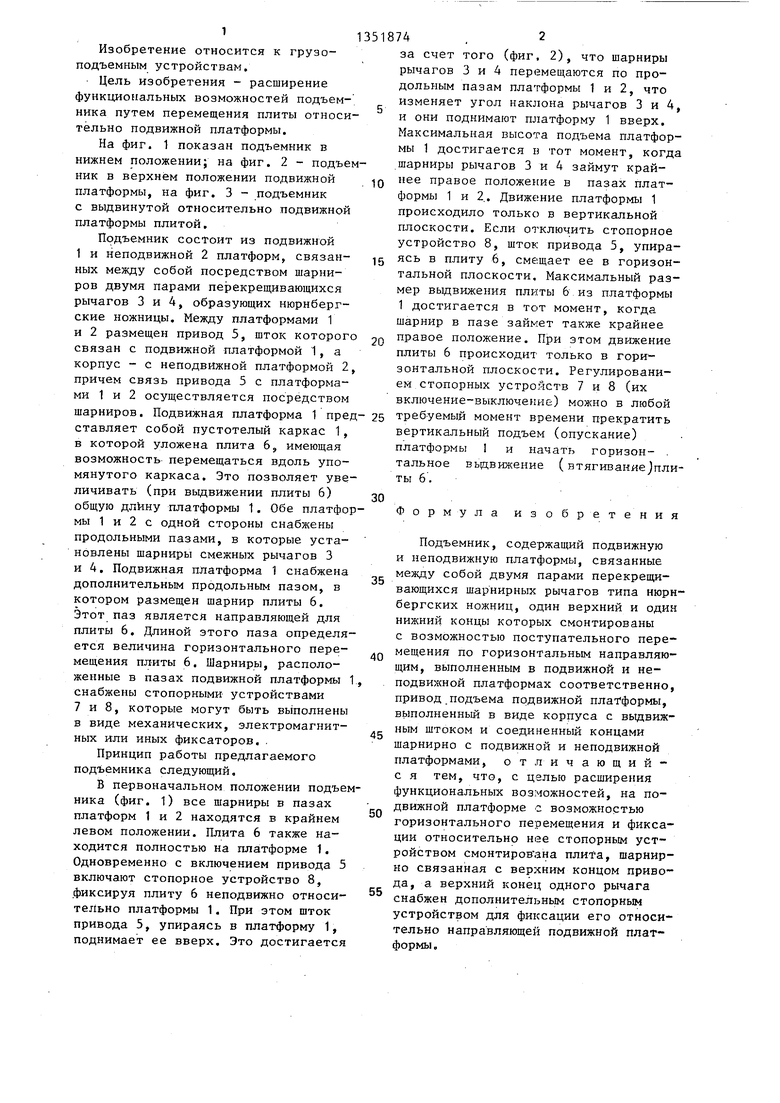
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемный стол | 1986 |
|
SU1318516A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407694C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2335454C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361807C1 |
| Привод подъемника | 1987 |
|
SU1585285A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2401795C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2308412C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| Подъемник-кантователь | 1990 |
|
SU1756265A2 |
Изобретение относится к грузоподъемным устройствам. Цель изобретения - расширение функциональных возможностей путем выдвижения плиты относительно подвижной платформы. Подъемник СОС.ТОИТ из подвижной 1 и неподвижной 2 платформ, связанных между собой посредством Шарниров двумя парами nepeKpeuijiBaromnxcH рычагов 3 и 4, образующих нюрнбергские ножницы. Платформы 1 и 2 рычаги 3 и 4 приводятся в движение приводом 5, выполненньм в виде корпуса со штоком. Платформа снабжена подвижной плитой 6, шарнирно связанной со штоком привода 5. Плита 6 и один верхний конец рычага 3 снабжены стопорными устройствами, фиксирующими их относительно подвижной платформы. Переключая стопорные устройства 7 и 8 и включая привод, можно добиться вертикального и горизонтального .перемещения плиты. 3 ил. (Л САЭ 01 00 4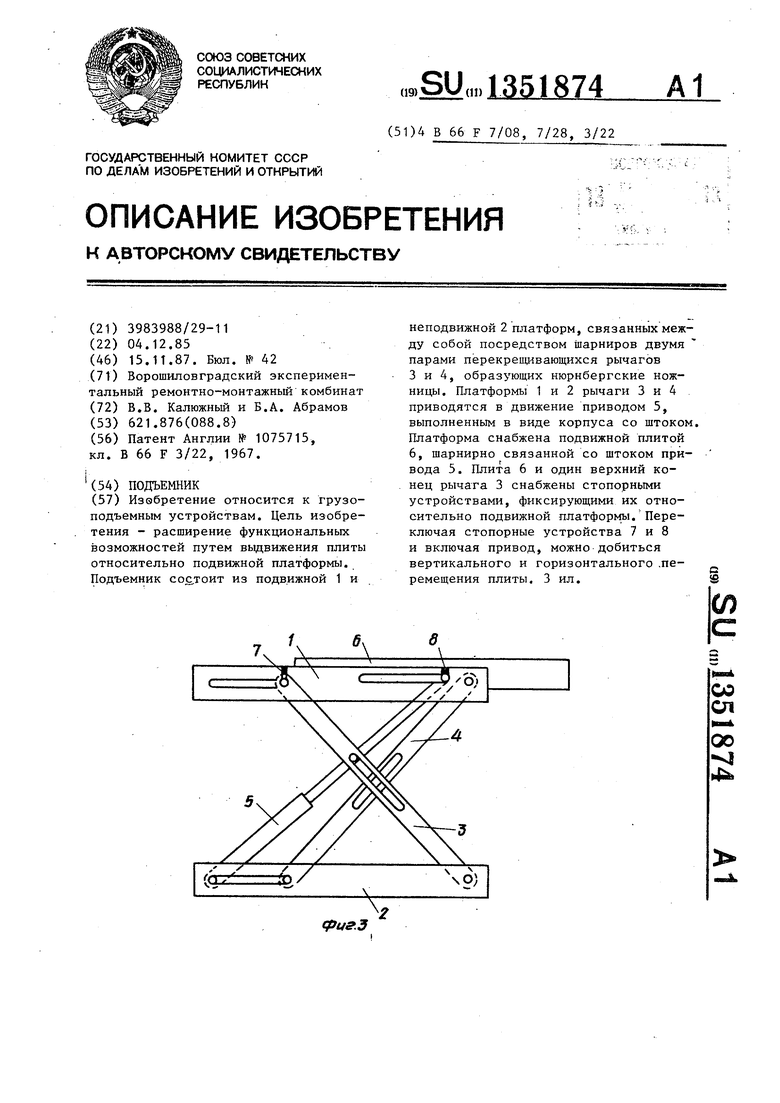
L
е
ь
а
Составитель А.Мазилкин Редактор М.Недолуженко Техред М.Ходанич Корректор В.Бутяга
Заказ 5531/18
Тираж 721Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушс.кая наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
V
N
№-
Фиг. 2.
| Патент Англии № 1075715, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
