Изобретение относится к измерительной технике и может быть использовано для контроля малых перемещений с помощью соленоидного датчика, имеющего обмотку с отводом от середины.
Целью изобретения является повышение точности измерений путем коррекции временной и температурной нестабильности соленоидного датчика.
На чертеже показана схема устройства,
перемещения X контролируемого объекта определяют по разности соотнощений частот, соответствующих индуктивности всей обмотки и полуобмотки в каждом положении сердечника 2:. .Д, foo N
fnfrji
где К - коэффициент пропорциональности. При изменении параметров окружающей среды, например температуры, и вследствие временной нестабильности датчика и автоосуществляющего способ измерения малыхЮ генераторного преобразователя изменяются перемещений с помощью соленоидного дат-абсолютные значения измеряемой частоты, чика.Однако соотношения частот, соответствую- Устройство содержит соленоидный датчик,щих индуктивностям полной обмотки и полувыполненный в виде обмОтки 1 с отво-обмотки, вследствие идентичности обеих подом от середины, и установленного с воз-луобмоток остаются неизменными и зависят можностью продольного перемеще гия отно- лищь от положения сердечника 2 относительно обмотки 1 сердечника 2, связываемого в процессе измерений с объектом контроля. Один крайний вывод обмотки 1 соединяют с общей точкой устройстсительно обмотки 1, т. е. от величины контролируемого перемещения X. Благодаря этому уменьшается погрешность, обусловленная температурной и временной нестабильва, а к другим выводам этой обмотки с .,Q ностью датчика и автогенераторного преобразователя, и повыщается точность нестабильности.
Формула изобретения
Способ измерения малых перемещений с помощью соленоидного датчика, имеющего обмотку с отводом от середины, заключающийся в том, что с помощью автогенераторного преобразователя измеряют частоту, соответствую.щую индуктивности
помощью переключателя присоединяют час- тотозадающий вход автогенераторного преобразователя 3 индуктивности обмотки 1 в частоту. К выходу автогенераторного преобразователя 3 переключают частотомер 4.
Способ измерения малых перемещений 25 с помощью соленоидного датчика осуществляют следующим образом.
В начальном положении устанавливают сердечник 2 симметрично относительно середины обмотки 1. Подключают к частотозадающему входу автогенераторного преоб- 30 полной обмотки датчика при начальном по- разователя 3 крайний свободный вывод об-ложении сердечника, симметричном полуобмотки 1 и измеряют с помощью часто-моткам, затем измеряют частоту, соответтомера 4 частоту foo автогенераторного пре-ствующую измененному положению сердечобразователя, соответствующую индуктив-ника, связываемого в процессе измерений с
ности полной обмотки соленоидного датчи-объектом контроля, отличающийся тем, что,
ка. Затем подключают к автогенераторно- 35 с целью повышения точности путем коррекции температурной и временной нестабильности датчика, при каждом положении сердечника датчика измеряют также и частоту, соответствующую индуктивности его полуобмотки, определяют отношения частот, соответствующих индуктивности обмотки и полуобмотки в каждом положении сердечника и по разности этих отношений определяют
му преобразователю средний вывод обмотки 1 и измеряют частоту foi, соответствующую индуктивности полуобмотки датчика. После этого связывают сердечник 2 с объектом контроля и измеряют частоты д- f ю и f,, автогенераторного преобразователя, соответствующие индуктивностям полной обмотки 1 и ее половине при измененном положении сердечника 2. Величину
величину контролируемого перемещения.
перемещения X контролируемого объекта определяют по разности соотнощений частот, соответствующих индуктивности всей обмотки и полуобмотки в каждом положении сердечника 2:. .Д, foo N
fnfrji
где К - коэффициент пропорциональности. При изменении параметров окружающей среды, например температуры, и вследствие временной нестабильности датчика и автогенераторного преобразователя изменяются абсолютные значения измеряемой частоты, Однако соотношения частот, соответствую- щих индуктивностям полной обмотки и полуобмотки, вследствие идентичности обеих полуобмоток остаются неизменными и зависят лищь от положения сердечника 2 относительно обмотки 1, т. е. от величины контролируемого перемещения X. Благодаря этому уменьшается погрешность, обусловленная температурной и временной нестабиль ностью датчика и автогенераторного преобразователя, и повыщается точность нестабильности.
Формула изобретения
Способ измерения малых перемещений с помощью соленоидного датчика, имеющего обмотку с отводом от середины, заключающийся в том, что с помощью автогенераторного преобразователя измеряют частоту, соответствую.щую индуктивности
полной обмотки датчика при начальном по- ложении сердечника, симметричном полуобвеличину контролируемого перемещения.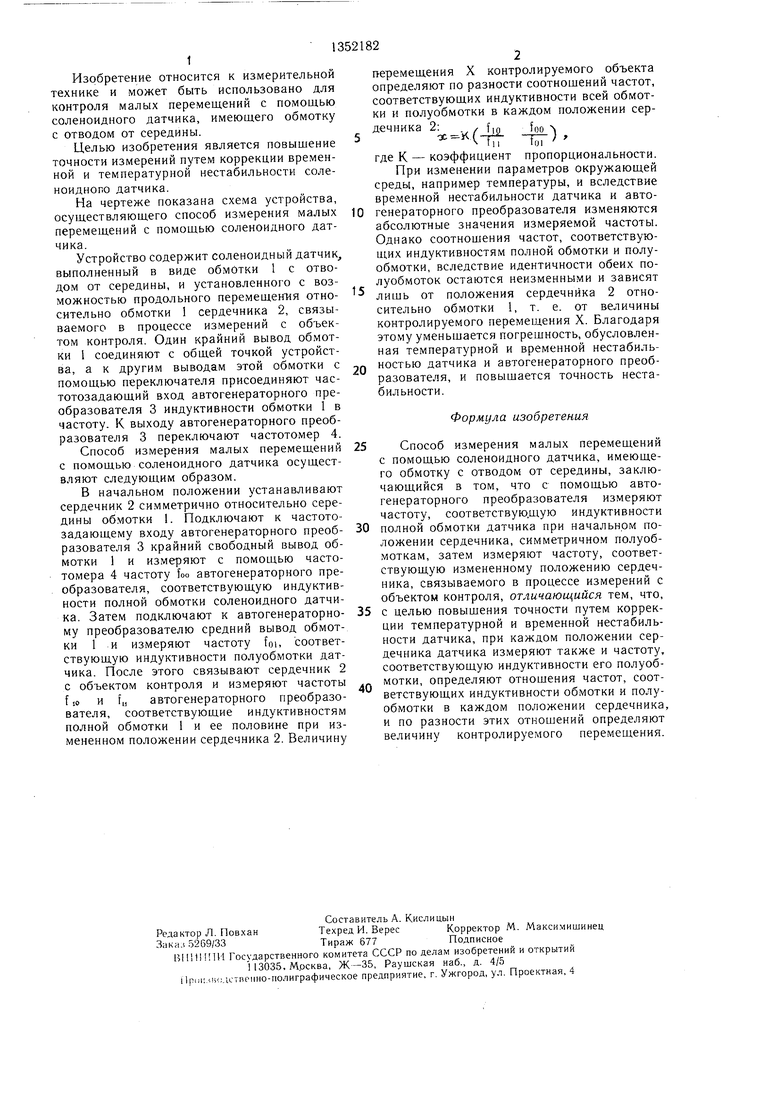
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2082076C1 |
| Дифференциально-трансформаторный преобразователь линейных перемещений | 1979 |
|
SU783571A1 |
| Устройство для измерения быстроменяющихся неэлектрических величин | 1989 |
|
SU1677640A1 |
| Преобразователь линейных перемещений | 1980 |
|
SU926521A1 |
| Устройство для измерения линейных перемещений | 1987 |
|
SU1430735A1 |
| УСТРОЙСТВО СИГНАЛИЗАЦИИ О НАЛИЧИИ АСИММЕТРИИ ТЯГОВОГО ТОКА В РЕЛЬСОВЫХ ЦЕПЯХ | 2010 |
|
RU2452034C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2366892C1 |
| ТУРБИННЫЙ РАСХОДОМЕР | 2000 |
|
RU2182660C2 |
| Устройство для измерения линейных перемещений | 1980 |
|
SU949329A1 |
| Способ измерения реактивного момента трансформаторных датчиков угла | 1979 |
|
SU905668A1 |
Изобретение относится к измерительной технике и предназначено для контроля малых перемещений с помощью соленоидного датчика, имеющего отвод от середины обмотки. Оно позволяет повысить точность измерений путем уменьшения погрешности, обусловленной температурной и временной нестабильностью датчика. При осуществлении способа измеряют с помонхью автогенераторного преобразователя 3 и частотомера 4 значения частот, соответствующие индуктивности полной обмотки 1 датчика и ее полуобмотки в исходно.м положении сердечника 2, симметричном относительно полуобмоток, а также в измененном положении этого сердечника, связываемого в процессе измерения с объектом контроля. По разности отношений измеренных частот в каждом положении сердечника определяют величину контролируемого перемещения. 1 ил. § сл со от tsD оо го
| Слабкий Л | |||
| Л | |||
| Методы и приборы предельных измерений в экспериментальной физике | |||
| М.: Наука, 1973, с | |||
| Способ получения суррогата олифы | 1922 |
|
SU164A1 |
| Агейкин Д | |||
| И | |||
| и др | |||
| Датчики контроля и регулирования | |||
| М.: Машиностроение, 1965, с | |||
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
