умножения. При этом подвижный регулирующий орган 2 совместно с корпусом 3 образует дросселирующие щели 7, соединяющие нагнетательную линию 8
и линию 9 слива и спрофилированные
tf в соответствии с уравнением у с-а,
где у - суммарная площадь дросселирующих щелей, с и а - постоянные коэффициенты,, X координата подвижно™ го регулирующего органа. Вместо про1
Изобретение относится к автоматическому регулированию и может быть использовано в гидравлических системах, где требуется плавное и точное регулирование давления в широких пределах.
Цель изобретения - повышение запаса устойчивости и уменьшения перерегулирования ,
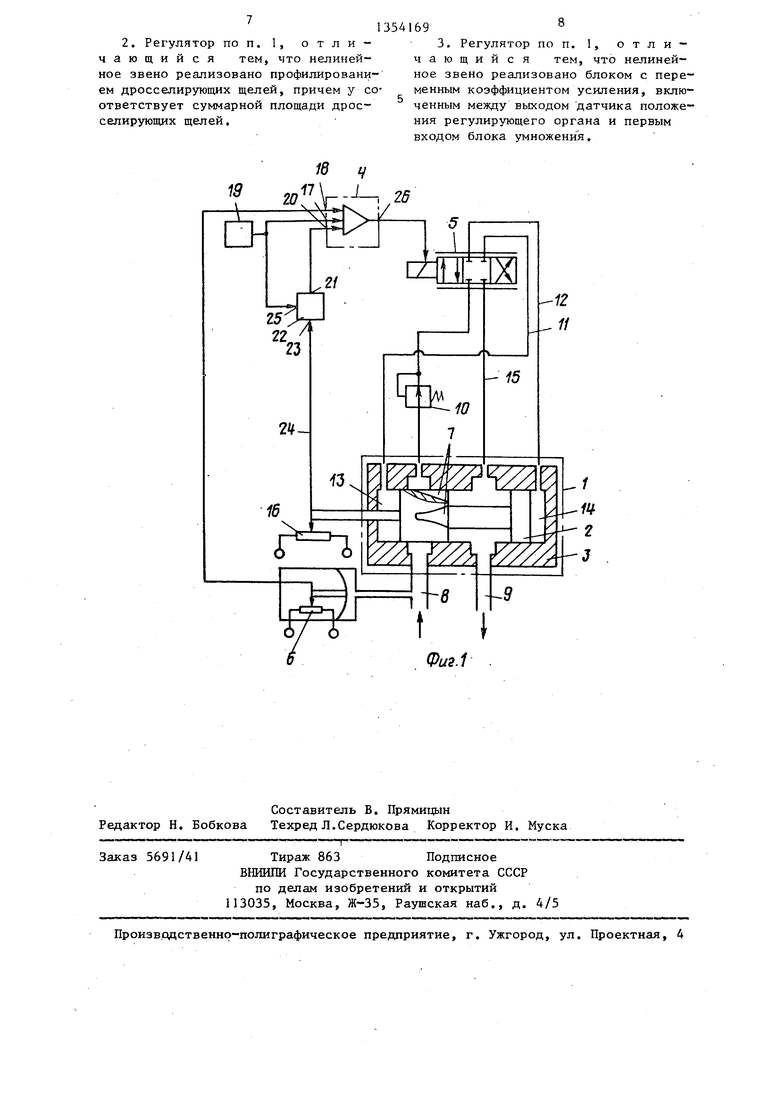
На фиг, 1 показана структурная схема регулятора с нелинейной зависимостью, реализованной профилированием дросселирующих щелей.; на фиг, 2 - структурная схема регулятора с нелинейным звеном, реализованным блоком с переменным коэффициентом усиления
Регулятор давления (фиг, 1) содержит дросселирующее устройство 1, имеющее подвижный регулирующий орган 2, расположенный в корпусе 3, эле- мент 4 сравненияS гидроусилитель 5 управления подвижным регулирующим органом и датчик 6 давления. Подвижный регулирующий орган 2 совместно с корпусом 3 образует дросселирующие щели 7, соединяющие нагнетательную гидролинию 8 со сливной гирролинией 9. К нагнетательной гидролинии 8 подключен датчик 6 давления. От этой же.гидролинии через редукционный клап;ан 10 запитывается гидроусили- тель 55 которьй гидролиниями 11 и 12 соединен с управляющими камерами 13 и 14 дросселирующего устройства 1, а гидролинией 15 соединен со сливной гидролинией 9, Подвижный регулирующий орган 2 связан с датчиком 16 положения. Первый вход 17 элемента 4 и его второй вход 18 соединены соответственно с задатчиком
филирования щелей нелинейную зависимость можно также реализовать блоком 27 с переменным коэффициентом усиления. Изобретение обеспечивает уменьшение перерегулирования давления в 2-4 раза. При этом регулятор с высо кой точностью устойчиво работает при любой жесткости гидролинии регулируемого давления, 2 ЗоП. ф-лы, 2 ил.
19 давления и датчиком 6 давления. Третий вход 20 элемента 4 соединен с выходом 21 блока 22 умножения. Первый вход 23 блока 22 линией 24 подключен к датчику 16 положения, а второй вход 25 этого блока подключен к задатчику 19. Гидроусилитель 5 управления подвижным регулирующим органом подключен к выходу 26 элемен та 4, Кроме того, имеется блок 27 с переменным коэффициентом усиления (фиг, 2),
Регулятор давления работает еле- дзлощим образом.
При изменении величины сигнала с выхода задатчика 19, задающего величину регулируемого давления, на выходе 26 элемента 4 формируется сиг нал ошибки, поступало1ций на гидроусилитель 5, В соответствии с величиной сигнала ошибки в гидролиниях 11 и 12 появляется расход рабочей жидкости, обеспечивающий изменение координаты (смещение) подвижного регулирующего органа 2 на величину, при которой сигнал с датчика 16, поступающий через блок 22 умножения на вход 20 элемента 4, компенсирует задающий сигнал. Величина смещения подвижного регулирующего органа 2 зависит не только от величины изменения (приращения) сигнала задатчика 19s но и от абсолютной величины этого сигнала, так как он поступает на вход 25 блока 22, Чем больше величина сигнала задатчика ,19, т,е,, чем больше за,цаваемая величина регулиру- давления, тем меньше смещение подвижного регулирующего органа 2 при одной и той же величине измене
д
ния (приращения) сигнала задатчика 19. При смещении подвижного регули- руюш.его органа 2 изменяется суммарная площадь дросселирующих щ€1лей 7 и изменяется давление в нагнетательной гидролинии 8. Скорость изменения давления зависит от гидравлической жесткости нагнетательной гидролинии 8 (модуля упругости рабочей жидкости и объема рабочей жидкости в нагнетательной гидролинии 8), изменения (приращения) суммарной площади дросселирующих щелей 7, вызванного смещением подвижного регулируемого органа, а также от величины регулируемого давления и расхода через регулятор давления, т.е. координаты подвижного регулирующего органа. Так как предлагаемое введение местной обратной связи ограничивает перемещение подвижного регулирующего органа, то скорость изменения давления и величина регулирования в сравнении с известным регулятором уменьшается. Одновременно с изменением даления изменяется сигнал, поступающий с датчика 6 на вход 18 элемента 4, что приводит к уменьщению первоначального смещения подвижного регулирующего органа 2 и, соответственно, к уменьшению скорости изменения давления . По окончании переходного процесса величина давления в нагнетательной гидролинии 8 соответствует новому установившемуся значению.
При изменении величины расхода через регулятор изменение давления в нагнетательной гидролинии 8 приводит к смещению подвижного регулирующего органа 2, обеспечивагацего стабилизацию регулируемого давления. Однако стабилизация давления осуществляется с некоторой статической ошибкой. Относительная величина ошибки ввиду профштирования дросселирующих щелей 7 и наличия блока 22 умножения для всего диапазона регулируемого дав- лершя и расхода через регулятор примерно постоянная величина, не влияющая существенно на функциональные возможности регулятора. Составляющая статической ошибки, вызванная наличием предлагаемого контура местной обратной связи, не более составляющей, определяемой трением в гидроусилителе 5.
Дпя определения зависимости, необходимой для профилирования дроссели4169-
рующих щелей, рассматривают уравне- ние расхода рабочей жидкости через дросселирующие щели и выражение для определения величины регулируемого давления:
5
..
dPp dt
(Q- QJ
(1)
(2)
где
5
5
0
суммарный расход рабочей жидкости через дросселирующие щели;
коэффициент расхода; плотность рабочей жидкости; суммарная поперечная площадь дросселирующих щелей; давление рабочей жидкости в нагнетательной гидроли- НИИ;
модуль упругости рабочей жидкости;
объем рабочей жидкост и в нагнетательной гидролинии;
Q - подача рабочей жидкости от источника гидропитания;
X - координата подвижного регулирующего органа. Рассматривая малые приращения пе Рfix}Р
17 V
ременных х и Р
Р
виде уравнение (1)
линиаризованном принимает вид
5
AQ
где Q
К
Q,
4Х + К
QP
ДРо
(3)
0
Чдх К
О.
ДР 5
приращение расхода рабочей
жидкости;
коэффициент расхода по
перемещению;
приращение координаты
коэффициент расхода по
давлению;
приращение давленияj
н
ах
Нff ./.
Р Р dx
(4)
aS.,,
.аРр
f(x)
/2 Р
(5)
55
Принимая Qf const и преобразуя уравнения (2) и (3) по Лапласу, записав в приращениях также и уравнение (2), получают передаточную функцию звена регулятора давления, входом которого является приращение коррди-
наты подвижного регулирующего органа, а выходом - приращение давления, т.е.
Wp(s)
:б)
S + 1
где Wp(s) - передаточная функция.
Из уравнений (6),,,(4) и (5) следу- етэ что передаточная функция данного звена представляет апериодическое звено первого порядка, причем коэффи циент усиления и постоянная времени этого звена переменные величины, Так как
Г
.)|:/F,
df(x) dx
2 R
/ f () „
df(x) dx
гШ
TO из уравнения (7) следует что для того, чтобы коэффициент усиления этого звена не зависит от х, необхо димо соблюдение условия
const .,
(8) 30
Решая дифференциальное уравнение (8)5 находят искомую зависимость для профилирования дросселирующих щелей регулятора давления.
f с-а
(9)
где с и а - постоянные коэффициентыs которые для любого конкретного регулятора давления можно найти, рещив следующую систему уравнений;
f с -а
гпах
(10)
fm.b
Максимальные и минимальные значения этих параметров назначаются, исходя из требований к регулятору и конструктивных соображений,
Из уравнения (5) и (6) следует, что фазовая характеристика рассматриваемого звена ухудшается с увеличением давления и уменьщением суммар ной площади дросселирующих щелеЙ9 что и определяет наличие и подкгаоче нИе датчика положения.
Приведенный пример выполнения регулятора давления (фиг, 2) содержит
5
0
0
в линии 24 блок 27 с переменным коэффициентом усиления, имеющий один вход и один выход. Этот блок являет- ся стандартным Точное выражение нелинейности, которую реализует блок 27J можно получить аналогично анали- ЗУ, приведенному выше. Дросселирующие щели в этом случае должны быть спрофилированы по пропорциональному закону. Все остальные элементы этого варианта регулятора и принцип его работы аналогичны регулятору на фиг, 1 . I
Использование предлагаемого регу
лятора обеспечивает уменьшение перерегулирования давления в 2-4 раза, при этом регулятор с высокой точностью устойчиво работает при любой жесткости гидролинии регулируемого .давления,
Формула изобретения
5
1, Регулятор давления, содержащий цепь внешней обратной связи, состоящую из последовательно соединенных датчика давления, связанного с нагнетательной гидролинией, элемента сравнения 5 подключенного вторым входом к выходу задатчика давления, и гидроусилителя управления подвижным регулирующим органом, цепь внутренней обратной связи, состоящую из последовательно соединенных подвижного регулирующего органа, расположенного в корпусе и образующего с ним дросселирующие щели, соединяющие нагнетательную и сливную гидролинии, датчика положения регулирующего органа и блока умножения, отличаю- щи и с я тем, что, с целью повьщ1е ния запаса устойчивости и уменьшения перерегулирования регулятора, в нем блок умножения подключен: выходом к третьему входу элемента сравнения, вторым входом - к входу задатчика давления, а в цепь внутренней обратной связи введено нелинейное звено
5
5
0
5
вида
у - с а
где у - значение выходного сигнала
звена;
с, а- постоянные коэффихдаенты,X координата регулирующего
подвижного органа.
2. Регулятор по п. 1, отличающийся тем, что нелинейное звено реализовано профилированием дросселирующих щелей, причем у соответствует суммарной площади дросселирующих щелей.
3. Регулятор по п. 1, отличающийся тем, что нелинейное звено реализовано блоком с переменным коэффициентом усиления, включенным между выходом датчика положения регулирующего органа и первым входом блока умножени я.
2it
3
16
Щ
-6
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор давления | 1979 |
|
SU877484A1 |
| Гидравлический источник питания | 1979 |
|
SU981712A1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2010 |
|
RU2425257C1 |
| СПОСОБ КОМПЕНСАЦИИ ПУЛЬСАЦИЙ РАСХОДА ОБЪЕМНОГО НАСОСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2105899C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| Гидросистема | 1986 |
|
SU1530826A1 |
| РЕГУЛЯТОР РАСХОДА | 1994 |
|
RU2092888C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
Изобретение относится к автоматическому регулированию и может быть использовано в гидравлических системах, где требуется плавное и точное регулирование давления в широких пределах. Цель изобретения - повьше- ние запаса устойчивости и уменьшение перерегулирования. Для этого регулятор давления содержит дросселирующее устройство 1, имеющее подвижный регу лирующий орган 2 в корпусе 3, элемент 4 сравнения, гидроусилитель 5 управления подвижным регулирующим органом, датчик 6 давления, нагнета- . тельную линию 8, линию 9 слива,,датчик 16 положения регулирующего органа 2, задатчик 19 давления и блок 22 i (Л С
Редактор Н. Бобкова
Составитель В, Прямицын
Техред Л.Сердюкова Корректор И. Муска
5691/41
Тираж 863 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Произв.одственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
