САЭ СО
оо
00
о
Изобретение относится к управлению электрическими машинами и может быть использовано в преобразователях цифрового кода в угол поворота.
Цель изобретения - повьшение точности преобразования кода в угол поворота.
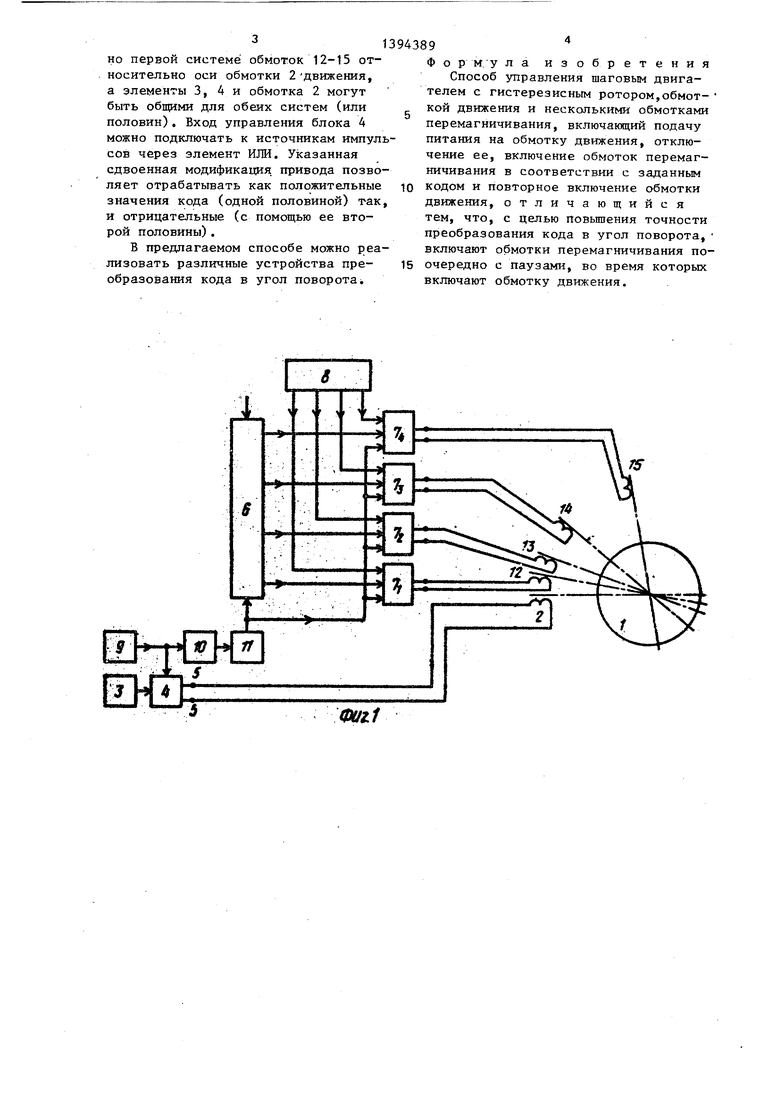
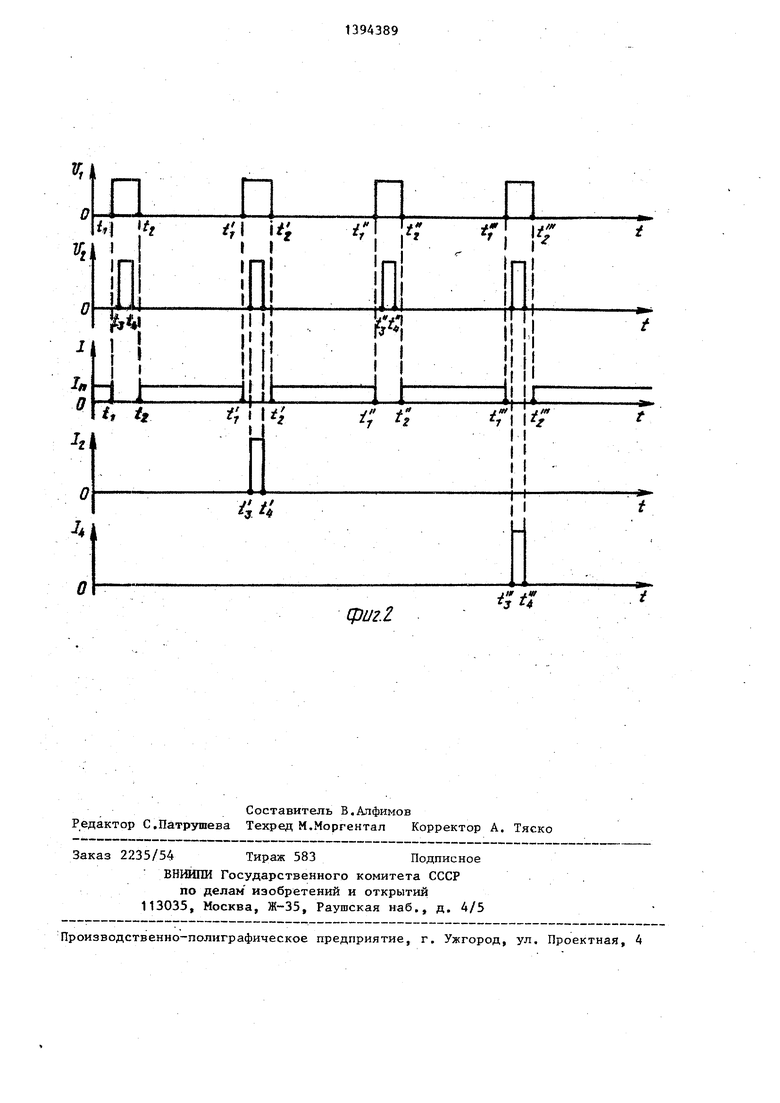
На фиг. 1 показана схема электропривода, на фиг. 2 - циклограмма его работы.
ГистерезИсный двигатель, включает в себя ротор 1 и статор с обмоткой 2 движения, с которой источник 3 постоянного напряжения связан через блок А запрета с выводами 5. Распределитель 6 импульсов с входом сброса соединен выходами с первыми входами элементов 3 И 71-74, вторые входы которых соединены с разрядными выход ми регистра 8. Источник 9 импульсов соединен с управляющим входом блока 4 запрета и входом элемента 10 задержки, выход которого подключен к входу блока 11 сужения импульсов, соединенного выходом с тактовым входом распределителя импульсов 6 и третьими входами элементов ЗИ 7, выхо- Ды которых соединены с обмотками 12- 15 перемагничивания, которые несоос- ны между собой. Отношение углов, .образованных осями обмоток перемагничивания с осью обмотки движения, равно основанию системы счисления заданного кода, записанного в регистре 8, |Так, при задании двоичного кода угол между осями обмоток 13 и 2 вдвое болше угла между осями обмоток 12 и 2 и т.д.
Способ реализуется.при работе электропривода.
Вначале включена обмотка 2 движения, и ось намагниченности ротора 1 совпадает с осью обмотки 2. Затем источник 9 импульсов вьфабатывает им пульс длительностью (t/i-t.,), на это время запирается блок 4 запрета и прерьгоается питание обмотки 2. Это же импульс проходит через элемент 10 задержки, элемент 11 сужения импульсов и изменяет состояние распределитель 6 импульсов. Если в первом разряде регистра 8 записан ноль, то ротор не перемагничивается. После прекращения импульса в момент t включается обмотка 2, но ротор 1 остается неподвижным. Во время появления следующего импульса на выходе источника 9 и мпульсов еще раз изменяется
5
5 0 0 з
состояние распределителя 6 импульсов и при записанной во втором разряде регистра 8 единице отпирается элемент 7.2 и включается обмотка 13 перемагничивания. Ротор 1 перемагничивается в направлении ее оси. После окончания импульса вновь включается обмотка 2 и ротор 1 перемещается на угловой o шаг, равньй углу между осями обмоток 2 и 13, Период работы источника 9 импульсов выбирается достаточным для перемещения ротора 1 на величину максимального шага. После выработки числа импульсов, равного числу разрядов регистра 8 ротор 1 устанавливается в положение, соответствующее коду регистра 9, а распределитель импульсов переключается в исходное положение. После этого меняется код регистра 8 и затем может быть совершен следующий цикл перемещения ротора 1, Между циклами перемещения ротора возможно перемещение его в исходное положение с помощью реверса.
Перемещение ротора с помощью последовательного перемагничивания в различных направлениях повышает точность преобразования, так как устраняется взаимное влияние нескольких обмоток перемагничивания при.их одновременном включении.Получаемый угол поворота также не зависит от нестабильности тока перемагничивания.
Реверс возможен путем изменения полярности тока.
Для сброса и реализации нулевого углового положения на роторе 1 можно предусмотреть выступ или стрелку, а на статоре - упор или ограничитель хода. Сброс углового положения в этом случае можно осуществлять путем реверса до упора выступа или стрелки ротора 1 в ограничитель на статоре двигателя,
В ряде случаев источник 3 питания, помимо вьшолнения его в виде источника постоянного напряжения или тока, можно выполнять и в виде источника переменнЬго напряжения или тока,можно также реализовать и схемы с отработкой кода как в прямом направлении, так и в обратном. В последнем случае к схеме фиг. 1 может быть добавлена вторая, аналогичная схема управления (с аналогичными элементами и. системой обмоток перемагничивания), Втор.ая система обмоток перемагничивания может располагаться симметрич- ,
5
0
0
5
но первой системе обмоток 12-15 относительно оси обмотки 2 движения, а элементы 3, 4 и обмотка 2 могут быть общими для обеих систем (или половин). Вход управления блока 4 можно подключать к источникам импульсов через элемент ИЛИ. Указанная сдвоенная модификация, привода позволяет отрабатывать как положительные значения кода (одной половиной) так, и отрицательные (с помощью ее второй половины).
В предлагаемом способе можно реализовать различные устройства преобразования кода в угол поворотаi
Форм.ула изобретения
Способ управления шаговым двигателем с гистерезисным ротором,обмоткой движения и несколькими обмотками перемагничивания, включающий подачу питания на обмотку движения, отключение ее, включение обмоток перемагничивания в соответствии с заданным кодом и повторное включение обмотки движения, отличающийся тем, что, с целью повышения точности преобразования кода в угол поворота, включают обмотки перемагничивания поочередно с паузами, во время которых включают обмотку движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электропривод | 1985 |
|
SU1495975A1 |
| Шаговый электропривод | 1985 |
|
SU1365340A1 |
| Шаговый электропривод | 1985 |
|
SU1354383A1 |
| Шаговый электропривод | 1985 |
|
SU1354384A1 |
| Шаговый электропривод | 1985 |
|
SU1354382A1 |
| Инерционный электропривод | 1980 |
|
SU961086A2 |
| Измеритель угловых перемещений | 1988 |
|
SU1603187A1 |
| Устройство для управления шаговым двигателем | 1977 |
|
SU663058A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1125643A1 |
| Устройство для преобразования перемещения в код | 1981 |
|
SU978174A1 |
Изобретение относится к электротехнике, к управлению электрическими машинами, и может быть использовано в преобразователях цифрового хода в угол поворота. Цель состоит в повьшении точности преобразования кода в угол поворота. Способ состоит в перемещении ротора с помощью его последовательного перемагничива- ния в различных направлениях. Это повьппает точность преобразования, так как устраняется взаимное влия- ние нескольких обмоток перемагничи- вания при их одновременном включении. Получаемый угол поворота также не зависит от нестабильности тока пере- магничиваний. 2 ил.
Фи11
Фи2.1
| Инерционный электропривод | 1980 |
|
SU961086A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
