снижение металлоемкости и габаритов. Пневмопривод с ручным механическим дублером и гидродемпфером содержит корпус, в котором размещены лопастные пневмодвигатель и гидродемпфер, выполненные с общим ротором 8 в виде диска 9 с двухсторонними на полшага смещенными на одной стороне диска 9 относительно другой его стороны ра- диально-симметричными рабочими лопастями, с которыми жестко соединен выходной вал 12 пневмопривода. Корпус снабжен соосными цилиндрами 4 и 5, герметично изолирующими выходной вал 12 от рабочих полос пневмодвига- теля и гидродемпфера. Ручной дублер вьшолнен в виде двухступенчатого редуктора, выходной вал 23 которого
1
Изобретение относится к арматуро- строеншо и может быть использовано в качестве механизированного привода .для управления трубопроводной арматуры с использованием энергии транспортируемой среды.
Целью изобретения является повышение надежности и снижение металлоемкости и габаритов.
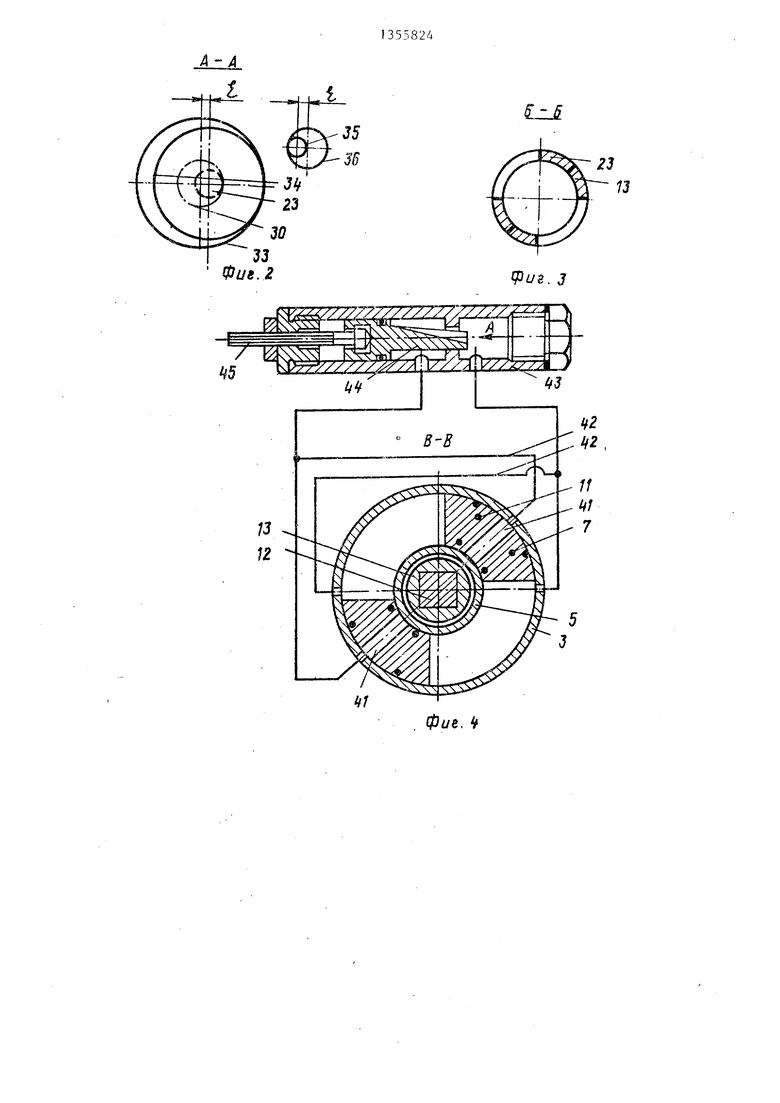
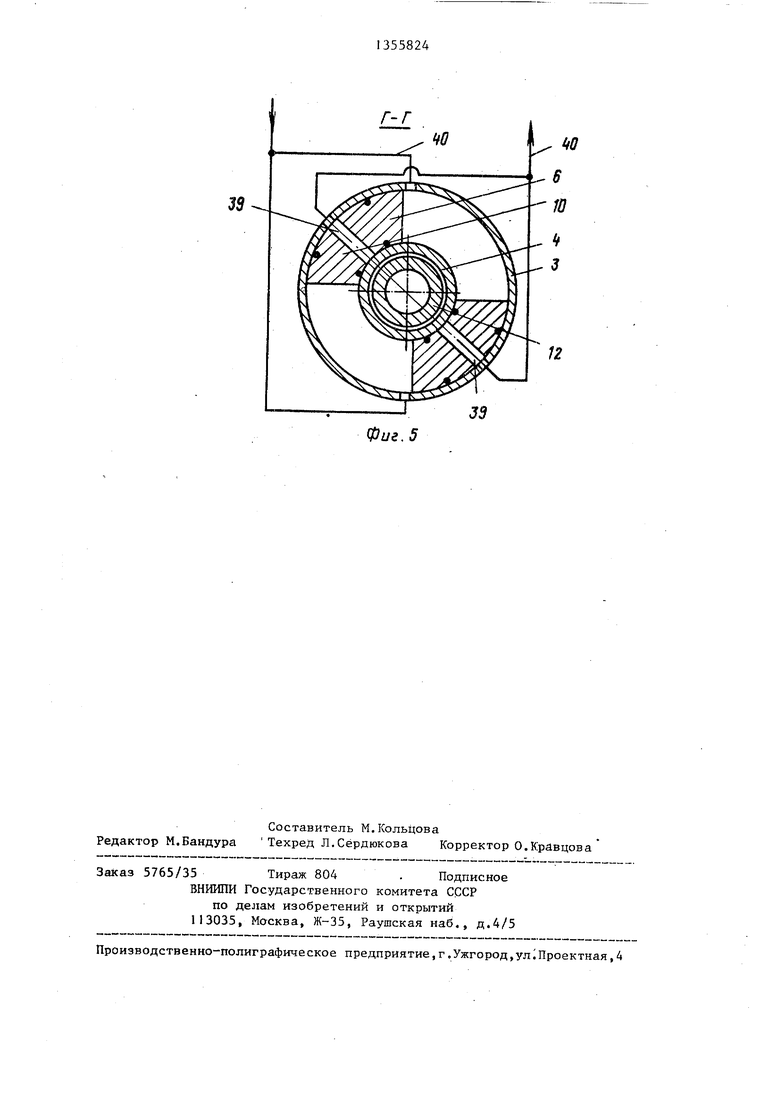
На фиг.1 показана принципиальная кинематическая схема пневмопривода с ручным механическим дублером и гидродемпфером; на фиг,2 - разрез А-А на фиг.1; на фиг.З - сечение Б-Б на фиг.1; на фиг.4 - разрез В-В на фиг. 1 на фиг.5 - разрез Г-Г на фиг.1.
Пневмопривод с ручным механическим дублером и гидродемпфером содержит лопастной пневмодвигатель и гидродемпфер, смонтированные в одном корпусе, состоящем из нинснего присоединительного фланца 1, выполненного за одно целое с радиально-симметрич- ными перемычками 2, внешнего цилиндра 3, внутренних цилиндров 4 и 5 и верхнего присоединительного фланца 6 выполненного за одно целое с радиаль- но-симметричными перемычками 7 гидродемпфера, смещенными по окружности на полшага относительно перемычек 2 нижнего присоединительного фланца 1.
соединен с выходным валом 12 пневмопривода посредством торцевой пшице- вОй муфты, а ведущий вал 25 редуктора соединен с его промежуточным валом гибкой кинематической связью 29. Промежуточньм вал 32 снабжен эксцентриковой втулкой 31, шарнирно соединенной с ведущей шестерней 33 внутреннего зацепления, которая находится в постоянном зацеплении с ответной ведомой щестерней 34, жестко соединенной с выходным валом 23 редуктора. Ведущая шестерня 33 установлена с возможностью колебательного движения в любом направлении относительно выходного вала 23 редуктора и зафиксирована от вращения вокруг собственной оси. 1 з.п. ф-лы, 5 ил.
Пневмодвигатель и гидродемпфер вьшолнены с общим ротором 8 в виде диска 9 с двухсторонними на полшага смещенными по окружности на одной стороне относительно другой стороны радиально-симметричными рабочими лопастями 10 пневмодвигателя и 11 гидродемпфера (фиг.4,5). Диск 9 жестко соединен с выходным валом 12 пневмопривода и полумуфгой 13 свободного хода с торцовыми радиально-симметрич- ными шлицами 14 (см.фиг.З), затянутыми гайкой 15 через упорный подшип- Мик 16, и компенсирующей шайбой 17,
определяющей величину установочного торцового зазора з подвижных соединениях диска 9 ротора 8 и нижнего присоединительного фланца 1. Компенсирующая шайба 18 определяет величину установочного торцовог О зазора в подвижных еоединениях диска 9 ротора 8 и верхнего присоединительного фланца 6.
Нижним присоединительным фланцем 1 пневмопривод ставится на фланец 19 стойки трубопроводной арматуры (шарового крана, затвора, клапана). При этом его выходной вал 12 торцовыми шлицами 20 соединяется со шпинделем 21 арматуры.
На верхний присоединительный фланец 6 ставится нижняя плита 22 корпуса двухступенчатого редуктора руч ного механического дублера, выходно вал 23 которого соединяется с торцовыми шлицами 14 полумуфты 13 свободного хода.
Двухступенчатьй редуктор ручного механического дублера содержит корпус 24 с нижней плитой 22, ведущий вал 25 с квадратным концом 26 под маховик 27 и с жестко соединенной с ним звездочкой 28. Звездочка 28 гибкой кинематической связью (например цепной) 29 соединена с ответной звездочкой 30, жестко посаженной вместе с эксцентриковой втулкой 31 на промежуточный вал 32 (с квадратом на выходном конце под маховик 27), с эксцентриковой втулкой 31 которого шар- нирно соединена ведущая шестерня 33 вйутреннего зацепления, находящаяся в постоянном зацеплении с ответной ведомой шестерней 34, жестко соединенной с выходным валом 23. При этом ведущая шестерня 33 внутреннего зацепления может совершать только круговые колебательные движения относительно оси выходного вала 23 редуктора, так как от вращения вокруг собственной оси она зафиксирована шарнирно соединенными с ней опорными роликами 35, оси которых смещены относительно осей цилиндрических опорных стаканов 36, жестко соединенных с корпусом 24 редуктора, однонаправ- ленно с эксцентриситетом S эксцентриковой втулки 31 промежуточного вала 32 на величину, равную эксцентриситету 6 втулки 31 промежуточного вала 32.
Уплотнения подвижных и неподвижных соединений рабочих поверхностей цилиндров 3, 4 и 5, диска 9 ротора,, нижнего и верхнего присоединительных фланцев 1 и 6 осуществляются посредством уплотнительных колец 37 и 38.
Рабочие полости 39 пневмодвигате- ля пневмотрубопроводами 40 через известный распределительньш узел управления соединяются с магистральным трубопроводом. Рабочие полости 41 гидродемпфера гидротрубопроводами 42 соединены с игольчатым дросселем 43, регулирующим скорость вращения диска 9 ротора посредством иглы 44i переме55824 I
щаемой БИНТОМ 45. Одновременгго гидродемпфер гасит свойственные пневмоприводам неравномерности движения диска 9 ротора 8.
Открытие трубопроводной арматуры (крана, затвора, клапана) при одностороннем давлении транспортируемой среды на запорный орган арматуры (не 10 показан), когда на шпиндель 21 необходимо приложить максимальньт расчетный крутящий момент, осуществляется посредством ручного механ1-п еского дублера вращением вед пцего вала 25 15 маховиком 27 до смещения запорного органа на угол 15-20 , когда последний становится значительно или полностью разгруженным. Дальнейшее вращение шпинделя 21 до полного откры- 20 тия арматуры осуществляется вращением промежуточного вала 32 маховиком 27, представленным на квадрат промежуточного вала 32, т.е. на второй ступени редуктора с большим переда- 25 точным отношением. При закрывании
трубопроводной арматуры перестановка маховика 27 осутцествляется в обратной последовательности, т.е. начало закрывания осуществляется вращением про- 30 межуточного вала 32 до поворота шпинделя 21 на угол до 70-75°, а затем до полного закрытия вращением ведущего вала 25. Вращение от ведущего вала 25 через гибкую кинематическую 35 связь 29 (звездочки 28 и 30) передается на промежуточный вал 32, жестко соединенный с эксцентриковой втулкой 3I, шарнирно соединенной с ведущей шестерней 33 внутреннего зацепле- 40 ния, находящейся в постоянном зацеплении с ответной ведомой шестерней 34, жестко соединенной с выходным валом 23. При этом ведущая шестерня 33 совершает круговые колебательные дви- 45 жёния относительно оси выходного вала 23.
Вращение от выходного вала 23 двухступенчатого редуктора ручного
Q механического дублера передается выходному валу 12 ротора 8 пневмопривода, с которым он соединен через муфту 13 свободного хода, позволяющую при расположении торцовых шлиц
е 20 выходного вала 12 ручного механического дублера в нейтральной угловой позиции выходному валу 12 ротора 8 пневмопривода свободно быть повернутым в крайние положения: Откпмто,
Закрыто, Поэтому после каждого закрытия или открытия трубопроводной ар посредством ручного механического дублера его выходной вал 12 должен обязательно возвращаться в нейтральную угловую no3H4tm, обозначенную известным образом.
При повороте шпинделя 21 трубопроводной арматуры на открытие или закрытие посредством пневмопривода используется энергия транспортируемой среды, которая из магистрального трубопровода под же давлением через известньй блок управления и пневмотрубопроводы 40 подается в соответствующие симметрично расположенные рабочие полости 39 пневмодви- гателя. При этом выходной вал 12 ро- то)а 8 пневмопривода соединен со шпинделем 21 трубопроводной арматуры посредством торцовых цшиц 20. Для предотвращения свойственной пневмоприводам неравномерности скорости вращения ротора и регулирования в расчетных пределах скорости открывания и закрывания трубопроводной арматуры в системе предусмотрен встроенный гидродемпфер, ротор 8 которого является общим с ротором 8 пневмопривода и выполнен в виде диска 9, симметрично расположенные рабочие лопасти 11 которого на полшага смещены по окрулсности относительно рабочих лопастей 10 пневмопривода. Такое взаимное расположение рабочих лопастей 11 и 10 соответственно гидродемпфера и пневмопривода позволяет обеспечить более равномерную угловую нагрузку рабочего внешнего цилиндра 3 и значительно снизить его деформацию при работе и не допустить защемления диска 9 ротора 8. При этом угловая скорость диска,9 ротора и, тем самым, угловая скорость ашинделя 21 трубопроводной арматуры регулируется осевым перемещением иглы 44 гидродемпфера посредством вращения винта 45,
Формула изобретения
1. Пневмопривод с ручным механическим дублером и гидродемпфером, содержащий корпус, в котором размещены
лопастные пневмодвигатель-с рабочими полостями и гидродемпфер, а также ручной дублер и выходной вал пневмопривода, отличающийся тем, что, с целью повышения надежности и снижения металлоемкости и габаритов, пневмодвигатель и гидродемпфер выполнены с общим ротором в
виде диска с двухсторонними на полшага смещенными на одной стороне диска относительно другой его стороны радиально-симметричньми рабочими лопастями, с которым жестко соединен
выходной вал пневмопривода, корпус снабжен соосными цилиндрами, герметично изолирующими выходной вал от рабочих полостей пневмодвигателя и гидродемпфера, а ручной дублер выполнен в виде двухступенчатого редуктора, выходной вал которого соединен с выходным валом пневмопривода посредством то1)цовой пшицевой полумуфты, а ведущий вал редуктора соединен с его промелеуточным валом, установленным соосно выходному валу нневмопривода, гибкой кинематической связью, причем промежуточный вал снабжен жестко соединенной с ним
эксцентриковой втулкой, шарнирно соединенной с ведзлцей шестерней внутреннего зацепления, находящейся в постоянном зацеплении с отв етной ведомой 1честерней, жестко соединенной
с выходным валом редуктора, при этом ведущая шестерня внутреннего зацепления установлена с возможностью колебательного двгокения в любом направлении относительно выходного вала редуктора и зафиксирована от вра1цения вокруг собственной оси,
2. Пневмопривод по п. 1 ,, о т л и - чающийся тем, что .фиксация вед .тцей шестерни от вращения осуществлена за счет шарнирно соединенных с ней опорных роликов, установленных с возможностью взаимодействия с цилиндрическими опорными стаканами,жестко соединенными с корпусом ред ук:тора,
причем оси опорных роликов смещены относительно осей опорных стаканов на величину, равнук эксцентриситету эксцентриковой втулки и промежуточного вала.
i
иг. j
Фие.
Фиг. 5


| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМОПРИВОД С РУЧНЫМ ДУБЛЕРОМ И ГИДРОДЕМПФЕРОМ | 1993 |
|
RU2053428C1 |
| ПРИВОД ТРУБОПРОВОДНОЙ ЗАПОРНОЙ АРМАТУРЫ | 1998 |
|
RU2132990C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| ПРИВОД КЛАПАНА КРАНОВОГО ТИПА И РУЧНОЙ ДУБЛЕР ПРИВОДА | 2000 |
|
RU2179681C2 |
| ЭЛЕКТРОМОТОРНЫЙ ПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 1996 |
|
RU2103582C1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2008 |
|
RU2364780C1 |
| Электропривод с ручным дублером | 2019 |
|
RU2730750C1 |
| ПРИВОД ПОВОРОТНОГО ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2190144C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2008 |
|
RU2366848C1 |
Изобретение относится к машиностроению и может быть использовано в качестве механизированного привода для управления трубопроводной арматуры с использованием энергии транспортируемой среды. Целью изобретения является цовьшшние надежности и CZ со ел ел оо ю 79 2Г Фиг. 1
| Трубопроводная арматура с автоматическим управлением | |||
| Справочник, Л | |||
| Машиностроение, 1982, с.295, 301 . |
