Изобретение относится к робототехнике и может быть использовано в качестве модуля роботов, работающих как в прямоугольной, так и в сферической системах координат.
Целью изобретения является улучшение массогабаритных показателей привода -за счет совмещенного выполнения пневмоцилиндра и электродвигателя.
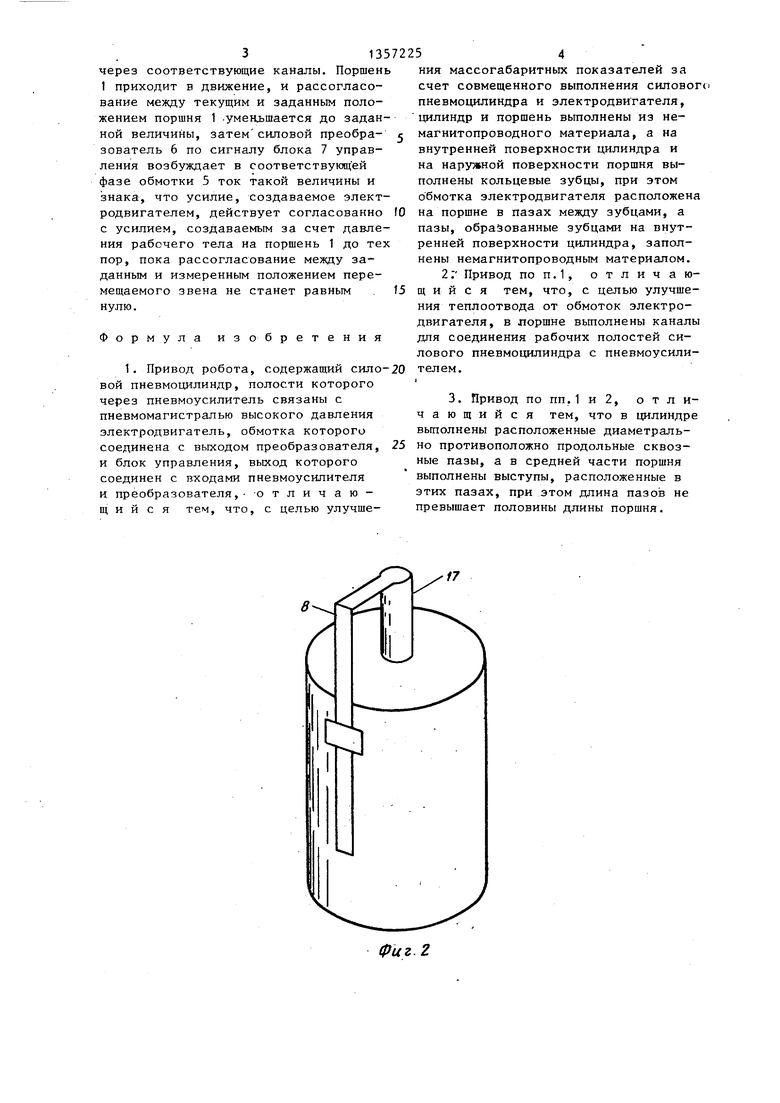
На фиг.1 изображена структурная схема привода; на фиг.2 - привод со штоком, внешний вид; на фиг.З - привод с трехфазн.ым линейным электродвигателем; на фиг.4 - модуль робота, выполненньй на основе привода.
Привод содержит поршень 1, помещенный в.нутри силового пневмоцилиндра 2, полости которого соединены с выходами пневмоусилителя 3, йодключенного 20 углового положения и скорости врасвоим входом к пневмомагистрали 4. Поршень 1 выполняет функцию одного элемента - линейного электродвигателя (индуктора), обмотки 5 которого соединены с выходами силового преобразователя 6. Вход Преобразователя 6 подключен к выходу блока 7 управления, выход которого соединен с управляющим входом пневмоусилителя 3. С поршнем 1 механически связан датчик 8 положения и скорости перемещения поршня 1, выходы которого соединены с входами блока 7 управления. Поршень 1 и пневмоцилиндр 2 выполнены из маг- нитного материала, причем пневмоцилиндр 2 выполняет функцию второго неподвижного элемента линейного электродвигателя. Для этого на внутренней поверхности пневмоцилиндра 2 (фиг.З) нанесены поперечные кольцевые зубцы 9, пазы 10 между которыми заполнены немагнитопроводным материалом. На наружной поверхности поршня 1 нанесены ответные кольцевые зубцы 11 и разме- °щена п-фазная статорная обмотка 5. Статор трехфазного электродвигателя состоит из идентичных секций 12, имеющих ширину, равную 1,5 зубцевого деления, и отделенных друг от друга немагнитными прокладками 13 шириной в 1/3 зубца. Секции 12 вместе с расположенными по краям поршня уплотняющими прокладками 14 и 15 стянуты в пакет немагнитной стяжкой 16.
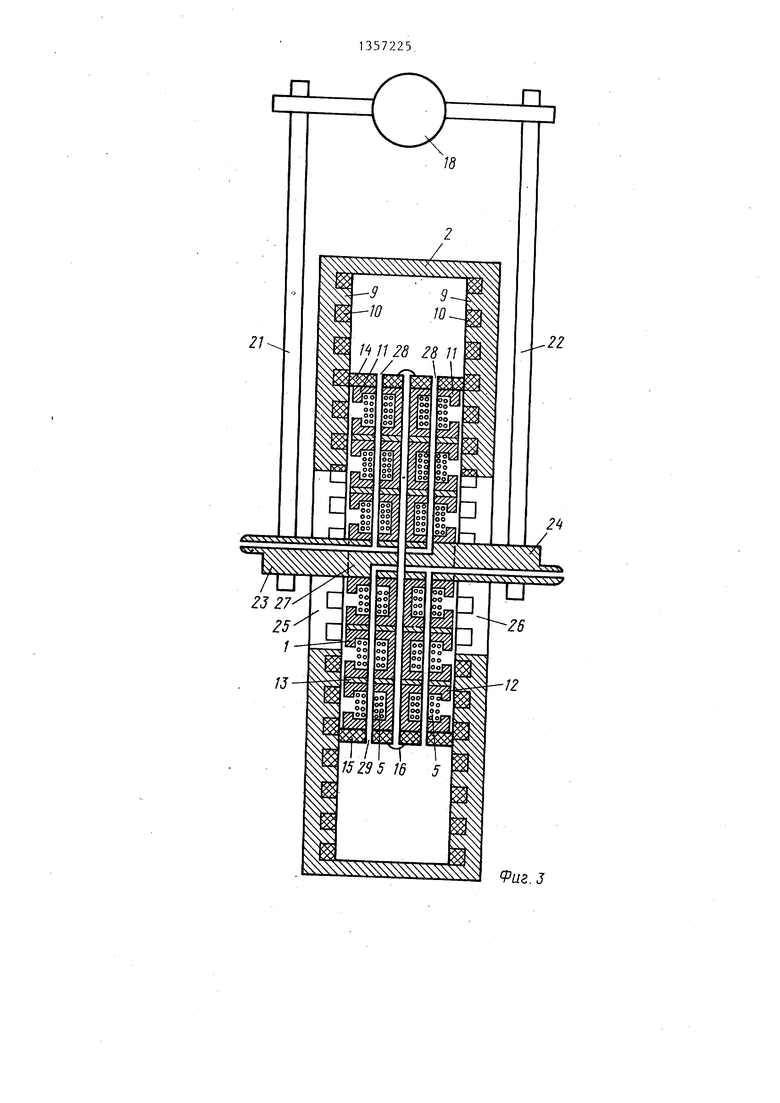
Поршень 1 привода может быть связан со звеньями робота посредством штока 17, с которым связана подвижна часть датчика 8 (фиг.2), или с помощью рьгчаг ов, например, для поворота
звена 18 (фиг.4). Для этого звено 18 .через одностепенной шарнир 19 подвешено к выступу 20 на .наружной стороне пневмоцилиндра 2. Обратный (не реализующий выходное перемещение) конец звена 18 через два идентичных вспомогательных рычага 21 и 22 шар- нирно связан с двумя диаметрально
противоположными выступами 23 и 24, выполненными в средней части поршня 1 и размещенными в двух продольных направляющих 25 и 26, выполненных в пневмоцилиндре 2. Поскольку угол поворота звена 18 и положение поршня 1 связаны однозначной зависимостью, то целесообразным в этом варианте привода является использование более простого и распространенного датчика
0
5
щения, ротор которого соединен с осью вращения звена 18.
Поршень 1 разделен на две половины немагнитной шайбой 27 ив нем вы- 5 полнены каналы 28 и 29 для подачи рабочего тела в полости пневмоцилиндра 2, В варианте привода, изображенном на фиг.2, каналы 28 и 29 продолжены в шайбе 27 и выступах 24 и 23 соот- ветственно. При наличии штока 17 (фиг.2) указанные каналы могут, быть продолжены внутри этого штока. Каналы 28 и 29 гибкими шлангами 30 (фиг.4) соединены с выходами пневмоусилителя 3.
Привод работает следующим образом.
С выходов датчика 8 на входы блока 7 управления поступают значения текущего положения и скорости перемещения 0 поршня 1. В зависимости от рассогласования между заданным и текущим положениями поршня блок 7 управления формирует выходной сигнал, например, на основе пропорционально-интеграль- 5 но-дифференциального закона управления , Выходной сигнал блока 7 управления поступает одновременно на вход силового преобразователя 6 и управляющий вход пневмоусилителя 3. Воздействие управляющего сигнала вызывает повьш1ение давления на одном из выходов пневмоусилителя 3 и понижение давления на втором его выходе. Под действием перепада давления рабочее тело через каналы, например, 28, начинает поступать в одну из полостей пневмоцилиндра 2. Одновременно давление в противоположной полости понижается за счет оттока рабочего тела
0
5
через соответствующие каналы. Поршен 1 приходит в движение, и рассогласование между текущим и заданным положением поршня 1 .уменьшается до заданной величины, затем силовой преобра- зователь 6 по сигналу блока 7 управления возбуждает в соответствующей фазе обмотки 5 ток такой величины и знака, что усилие, создаваемое электродвигателем, действует согласованно с усилием, создаваемьм за счет давления рабочего тела на поршень 1 до тех пор, пока рассогласование между заданным и измеренным положением перемещаемого звена не станет равным . нулю.
Формула изобретения
1. Привод робота, содержащий сш1овой пневмоцилиндр, полости которого через пневмоусилитель связаны с пневмомагистралью высокого давления электродвигатель, обмотка которого соединена с выходом преобразователя, и блок управления, выход которого соединен с входами пневмоусилителя и преобразователя,- -отличающийся тем, что, с целью улучшения массогабаритных показателей за счет совмещенного выполнения силово пневмоцилиндра и электродвигателя, цилиндр и поршень выполнены из не- магнитопроводного материала, а на внутренней поверхности цилиндра и на наружной поверхности поршня выполнены кольцевые зубцы, при этом обмотка электродвигателя расположена на поршне в пазах между зубцами, а пазы, образованные зубцами на внутренней поверхности цилиндра, заполнены немагнитопроводным материалом.
2. Привод ПОП.1, отличающийся тем, что, с целью улучшения теплоотвода от обмоток электродвигателя, в поршне выполнены каналы дня соединения рабочих полостей силового пневмоцилиндра с пневмоусили- телем.
I
3. Привод по пп.1 и 2, отличающийся тем, что в цилиндре выполнены расположенные диаметрально противоположно продольные сквозные пазы, а в средней части поршня выполнены выступы, расположенные в этих пазах, при этом длина пазов не превышает половины длины поршня.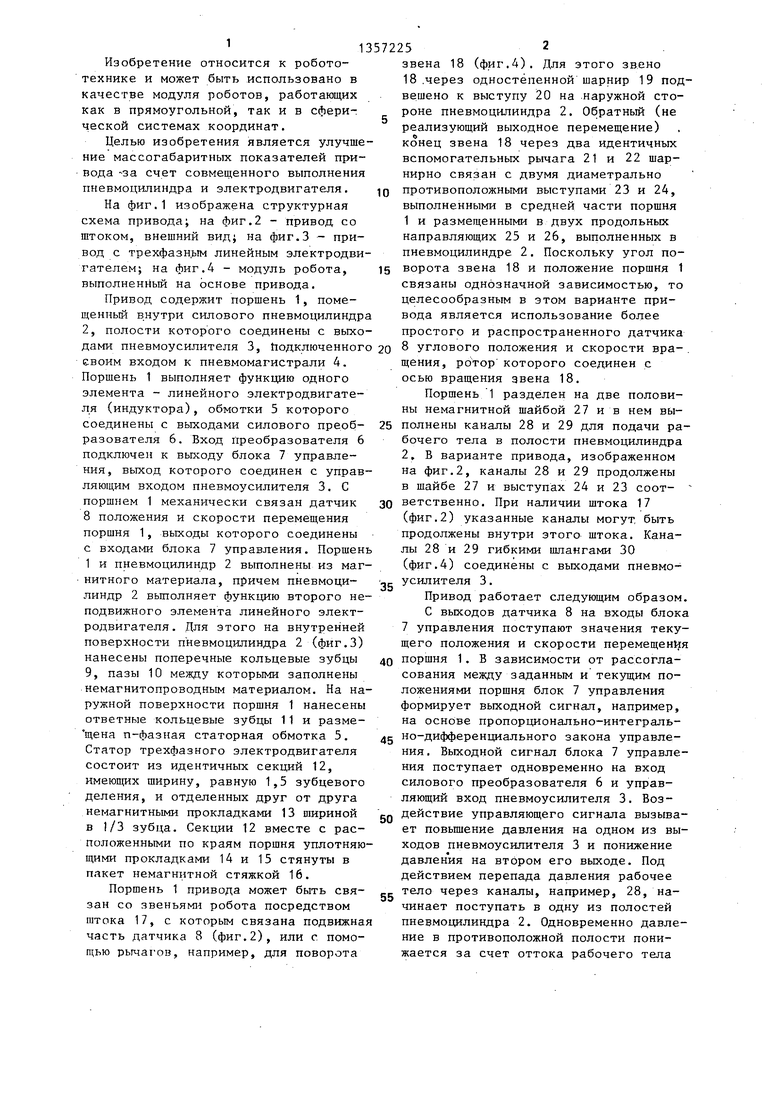
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата и перемещения электропроводных материалов | 1983 |
|
SU1199584A1 |
| Вакуумное уплотнение вала, совершающего возвратно-поступательное и вращательное движения | 2022 |
|
RU2788058C1 |
| РОТОРНАЯ УПРАВЛЯЕМАЯ СИСТЕМА С ЭЛЕКТРОПРИВОДОМ ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДОЛОТА | 2017 |
|
RU2690238C1 |
| СПОСОБ ШЛИФОВАНИЯ СЛОЖНЫХ ПОВЕРХНОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1986 |
|
RU1378228C |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД ДЛЯ РЕГУЛИРУЮЩИХ КЛАПАНОВ ГАЗОНЕФТЕПРОДУКТОПРОВОДОВ | 2000 |
|
RU2174629C1 |
| Пневматический исполнительный механизм | 1989 |
|
SU1622653A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО ТОКА В ПЕРЕМЕННЫЙ | 1999 |
|
RU2159005C1 |
| Электропривод переменного тока | 1987 |
|
SU1670766A1 |
| ПНЕВМОУСИЛИТЕЛЬ | 2002 |
|
RU2235222C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РЕГУЛИРУЕМОГО КЛАПАНА С ПНЕВМОУСИЛИТЕЛЕМ | 2007 |
|
RU2439339C2 |
Изобретение относится к области робототехники и может быть использовано в качестве модуля роботов, ра- ботанлцих как в прямоугольной, так и в сферической системе координат. Целью изобретения является улучшение массогабаритных показателей привода за счет совмещенного выполнения пнев- моцилиндра и электродвигателя. Поршень 1 и пневмоцилиндр 2 привода выполнены из магнитопроводного материала, на внутренней поверхности силового пневмоцилиндра 2 выполнены попе- речные кольцевые зубцы пассивного ротора линейного электродвигателя, пазы между которыми заполнены немагнито- проводным материалом, а на наружной поверхности поршня вьтолнены ответные ( кольцевые зубцы и расположена обмотка 5 линейного электродвигателя. По сигналам датчика 8 положения и скорости перемещения поршня 1 блок управления 7 вырабатывает сигнал, воздействующий на вход управления силового преобразователя 6, подключенного своим выходом к статорным обмоткам 5, и вход пневмоусилителя 3, выходы которого соединены с полостями пневмоцилиндра 2. Электро- и пневмодвигатель создают усилие, обеспечивающее заданное перемещение поршня 1. Для улучшения охлаждения статора рабочее тело поступает в полости пневмоцилиндра 2 через каналы, вьтолненные в поршне 1. 2 з.п. ф-лы, 4 ил. с (Л со ел |С N5 СЛ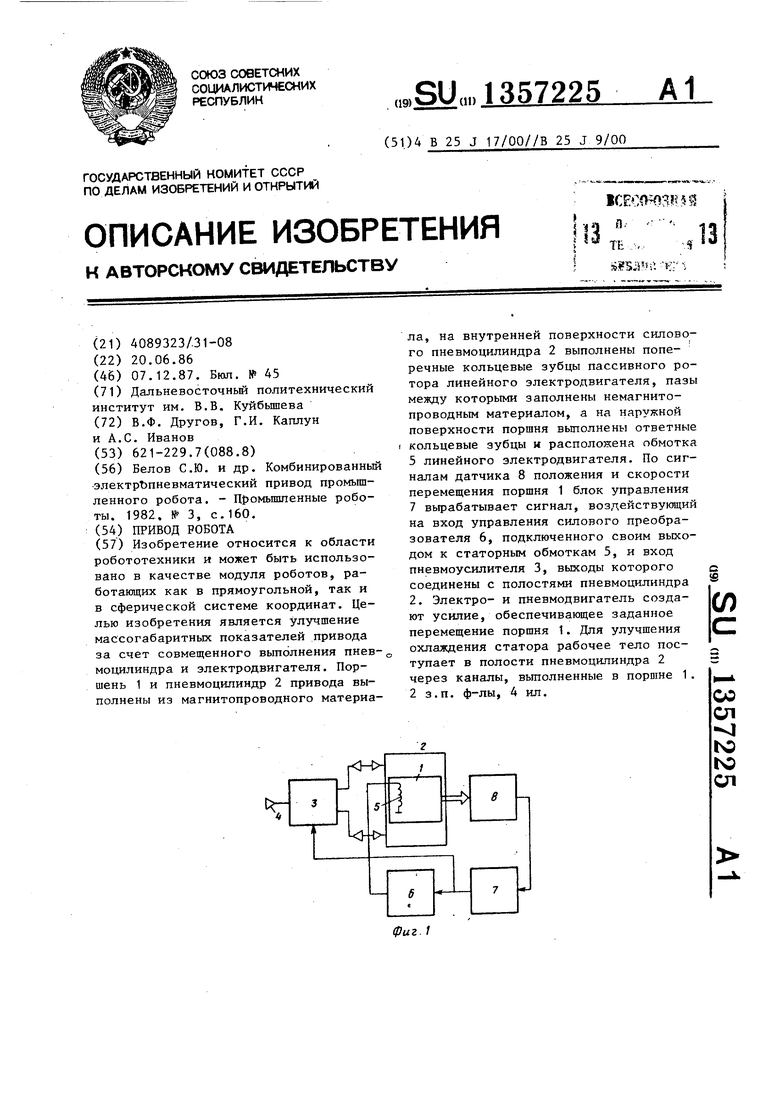
/7
Фиг. 2
21
22
Фаг. J
1357225
18
фиг.
Редактор А. Ворович
Составитель Ф. Майоров
Техред Л.Сердюкова Корректор М. Максимишинец
Заказ 5931/13 Тираж 952 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.Ч/5
Производственно-полиграфическое предйриятие, г. Ужгород, ул, Ироектная, 4
| Белов С.Ю | |||
| и др | |||
| Комбинированный электрЪпневматический привод промышленного робота | |||
| - П омьшшенные роботы | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
