;& со
сд
00
«
Изобретение относится к машиностроению и предназначено для захвата и перемещения электропроводных материалов (магнитных и немагнитных) и может быть использовано для улавливания и удаления движущихся металлических частиц, например, в металлообработке для захвата и отвода вьющейся сливной или элементной стружки из зоны резания металлорежущих ,.станков.
|, S Целью изобреетения является повышение эффективности захвата и расш 1рение технологических возможностей путем захвата и .перемещения немагнитных материалов.
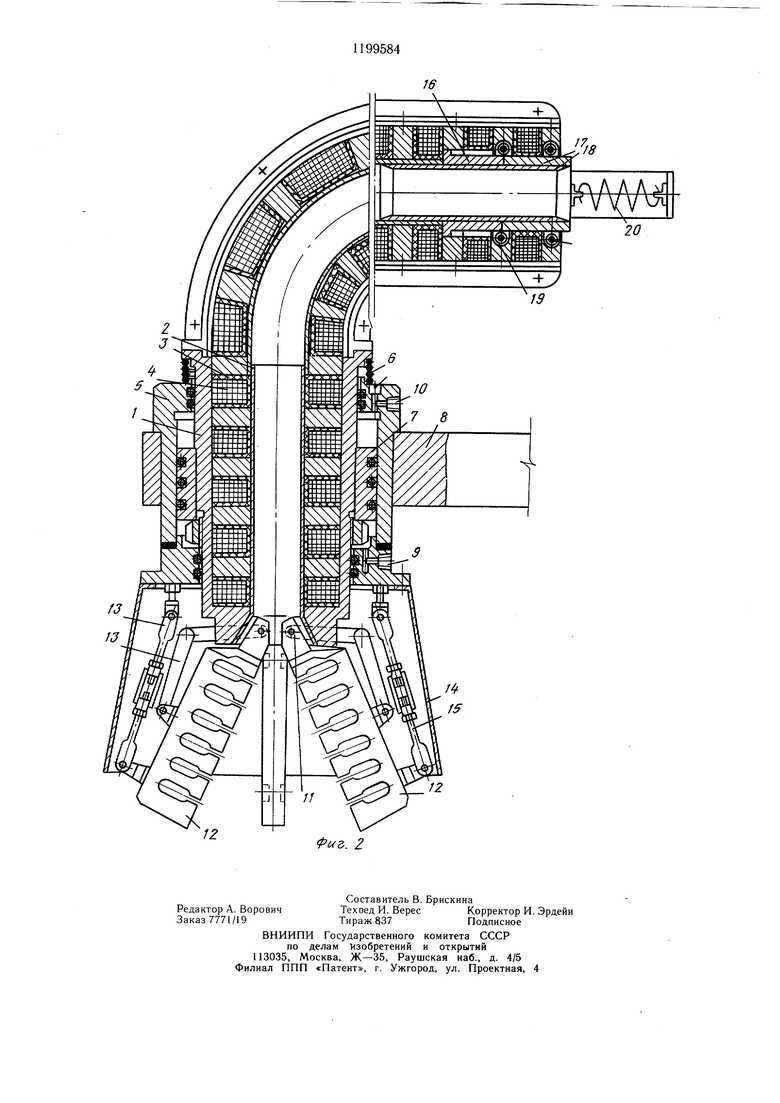
На фиг. 1 изображено предлагаемое устройство со сведенными губками схвата, обший вид; на фиг. 2 - то же, с разведенными губками схвата и втянутым вовнутрь силового цилиндра трубопроводом.
Устройство содержит установленный в корпусе 1 трубопровод 2 с расширяющейся входной частью, охваченный рядом цилиндрических катушек 3 с обмоткой 4 для создания бегущего магнитного поля, привод аксиального перемещения трубопровода 2, состоящий из силового цилиндра 5, охватывающего корпус 1 и подпружиненного к нему пружиной 6, и поршня 7, жестко связанного с корпусом 1.
Цилиндр 5 закреплен на кронштейне 8 и через штуцеры 9 и 10 связан с источником рабочей среды (не показан).
С расширяющейся частью трубопровода 2 через шарниры 11 связаны губки 12, выполненные в виде шихтованного магнитопровода, в пазах которого размещена обмотка (не показана) для создания бегущего магнитного поля. Губки 12 связаны через рычажный механизм 13, закрытый кожухом 14, с цилиндром 5, при этом рычажный механизм содержит регулируемые по длине рычаги в виде талрепов 15.
На выходе трубопровода 2 установлен толкатель, включающий втулку, состоящую из двух частей 16 и 17, при этом часть 16 выполнена из магнитопроводного материала, а часть 17 - из немагнитопроводного. Обе эти части установлены на трубе 18 из немагнитопроводного материала, а втулка установлена в подшипниках 19, обеспечивающих ей продольное перемещение, и подпружинена к трубопроводу 2 пружиной 20.
Устройство работает следующим образом.
С помощью автооператора или манипулятора, связанного с кронштейном 8, устройство подводится в зону резания, например, токарного станка.
При обработке детали сходящая с резца металлическая стружка попадает в магнитное поле, создаваемое многофазной обмоткой губок 12, находящихся в разведенном состоянии и в ней индуцируются электрические токи. В результате взаимодействия
индуцированных токов с бегущим магнитным полем, создаваемым обмоткой губок 12, возникает движущая сила, под действием которой стружка перемещается в направлении перемещения бегущего магнитного
поля и происходит ее втягивание в прямоугольный канал, образованный сходящимися под углом губками 12 схвата.
Образовавшийся канал имеет переменное, уменьшающееся к входу в трубопровод 2 сечение, что приводит к росту напряженности магнитного поля внутри канала и возрастанию движущей силы по его длине. Вследствие того, что губки 12 закреплены с помощью щарниров 11 с расширяющейся частью трубопровода 2, захваченная металлическая стружка достигает входа в трубопровод 2 и под действием бегуш.его магнитного поля, создаваемого обмоткой 4 цилиндрических катушек 3, происходит дальнейшее перемещение стружки по трубопроводу 2 до толкателя, в котором происходит
возвратно-поступательное движение втулки за счет периодического взаимодействия ее части 16, выполненной из магнитопроводного материала, с магнитным полел5 обмотки 4 катушек 3, и возвращение ее в исходное положение под действием пружины 20.
Кроме того, перепусканием рабочей среды через штуцеры 9 и 10 силового цилиндра 5 привода аксиального перемещения трубопровода 2 поршню 7 сообщается возвратнопоступательное движение, что приводит к
возвратно-поступательному перемещению трубопровода 2 и периодическому сведению и разведению губок 12 схвата путем их соединения с цилиндром через рычажный механизм 13. При этом взаимное расположение губок 12 регулируется с помощью талрепов 15.
Периодическое перемещение трубопровода. 2 с одновременным сведением и разведением губок 12 и возвратно-поступательным перемещением втулки толкателя способствует захвату и выбросу перемещаемой по трубопроводу металлической стружки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный схват | 1985 |
|
SU1306712A1 |
| Схват манипулятора В.Г.Вохмянина | 1986 |
|
SU1357221A1 |
| Магнитный схват | 1986 |
|
SU1430283A1 |
| Электромагнитное захватное устройство | 1990 |
|
SU1745541A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Устройство для захвата и перемещения ферромагнитных материалов | 1982 |
|
SU1066779A1 |
| Захватное устройство | 1990 |
|
SU1775290A1 |
| Пневматический адаптивный сборочный схват | 1989 |
|
SU1794642A1 |
| Схват манипулятора В.Г.Вохмянина | 1988 |
|
SU1627402A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ЛЕОНТЬЕВА А.А. | 1997 |
|
RU2175164C2 |

1. УСТРОЙСТВО ДЛЯ ЗАХВАТА И ПЕРЕМЕЩЕНИЯ ЭЛЕКТРОПРОВОДНЫХ МАТЕРИАЛОВ, содержащее установленный в корпусе трубопровод с расширяющейся входной частью, охваченный рядом цилиндрических катушек с обмоткой для создания бегуш,его магнитного поля, и толкатель, включающий втулку, состоящую из двух частей, одна из которых выполнена из магнитопроводного материала, а другая - из немагнитопроводного, отличающееся тем. что, с целью повышения эффективности захвата и расширения технологических возможностей путем захвата и перемещения немагнитных материалов, оно снабжено приводом аксиального перемещения трубопровода, выполненным в виде охватывающего корпус и подпружиненного к нему силового цилиндра, поршень которого жестко связан с корпусом, и схватом с рычажным механизмом и губками, выполненными в виде щихтованного магнитопровода, в пазах которого размещена обмотка для создания бегущего магнитного поля, шарнирно закрепленными на трубопроводе в расширяющейся его части и связанными через рычажный механизм с силовым цилиндром, при этом толкатель установлен на выходе трубопровода. 2. Устройство по п. 1, отличающееся тем, (Л что рычажный мееханизм содержит регулируемые по длине рычаги в виде талрепов.
| Устройство для захвата и перемещения ферромагнитных материалов | 1982 |
|
SU1066779A1 |
| кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
