Изобретение относится к машиностроению, в частности к способам и узстройствам для определения потерь энергии в подвеске маховичного двигателя транспортного средства при действии гироскопических нагрузок, и может быть использовано при диагнос- тике подвески, например для выбора предпочтительного ее конструктивного варианта.
Целью изобретения является повьше- ние точности диагностики подвески маховичного двигателя транспортного средства.
На чертеже представлена Кинематическая схема предлагаемого устройства.
Устройство для диагностики подвески транспортного средства содержит соединенную с подвеской 1 раму 2. Подвеска 1 состоит из упругих элементов 3 и не менее чем из одной пары гидравлических амортизаторов 4,, котоУстройство при реализации предлагаемого способа диагностики подвески
1маховичного двигателя 8 транспорт- g ного средства работает следующим образом. Ведомое колесо 7 устанавливают с эксцентриситетом, размещают раму
2транспортного средства с колесами 6, 7 и 9 на ровной опорной поверхнос10 ти, соединяют вал маховика 10 с электродвигателем (не показан), подключают контакты электродвигателя к внещ- ней электросети и разгоняют маховик 10. После разгона маховика 10 соеди15 няют его вал при помощи муфты 14 посредством гибкого вала 11, редуктора 2 и цепной передачи 13 с ведущим колесом 9. Затем транспортное средство разгоняют за короткое вре20 мя до заданной скорости, переводят его в режим наката, отключая муфтой 14 двигатель 8 от ведущего колеса 9, после чего транспортное средство движется до остановки за счет накопленрые сообщены друг с другом трубопро- ной кинетической энергии. После ос- водом 5. На раме 2 установлены ведо- тановки транспортного средства измеряют пройденный им путь. После измерения пути устраняют эксцентриситет колеса 7, повторно разгоняют маховик 30 10, соединяют его вал с ведущим колесом 9, разгоняют транспортное средство до заданной скорости, переводят его в режим наката, измеряют пройденный им путь до остановки, и 35 по разности измеренных значений пути определяют потери в подвеске 1 маховичного двигателя 8 при действии заданных гироскопических нагрузок, за вычетом потерь энергии, не связа н- 40 ных с угловьми колебаниями рамы 2.
Когда колесо 7 установлено с экс- центриситетом, рама 2 при движении транспортного средства по ровной опорной поверхности совершает колеба- Устройство снабжено средством-соз- 45 тельное вращательное движение вокруг Дания эксцентриситета ведомого коле- оси вращения колеса 9, в результате са 7, ось которого не совпадает с осью ведущего колеса 9, с приводом
мые колеса 6 и 7, а также по меньшей мере одно связанное с маховичным двигателем 8 ведущее колесо 9. Маховик 10 двигателя 8 связан с колесом 9 трансмиссией, содержащей гибкий вал 11, редуктор 12, цепную передачу 13 и муфту 14, например фрикционную. Двигатель 8 соединен с рамой 2 Посредством подвески 1, причем центр масс маховика 10 расположен на оси ведущего колеса 9, а амортизаторы 4 подвески 1 размещены в плоскости, . проходящей через ось вращения маховика 10, на равных расстояниях от по- .следней. Крепление амортизаторов 4 к корпусу маховичного двигателя 8 осуществлено при помощи щаровых шарниров 15.
чего на подвеску 1 действуют гироскопические нагрузки, определяемые эксцентриситетом, радиусом ведомого кодля принудительного изменения эксцентриситета (средство создания, экс- 50 леса 7, скоростью движения транцентриситета и привод его изменения не показаны).
Маховичный двигатель 8 снабжен также средством раскрутки маховика за счет энергии внешнего источника, например Электродвигателем с электрическими контактами для подключения к внешней электросети (электродвигатель ие показан).
-
3594732
Устройство при реализации предлагаемого способа диагностики подвески
1маховичного двигателя 8 транспорт- g ного средства работает следующим образом. Ведомое колесо 7 устанавливают с эксцентриситетом, размещают раму
2транспортного средства с колесами 6, 7 и 9 на ровной опорной поверхнос10 ти, соединяют вал маховика 10 с электродвигателем (не показан), подключают контакты электродвигателя к внещ- ней электросети и разгоняют маховик 10. После разгона маховика 10 соеди15 няют его вал при помощи муфты 14 посредством гибкого вала 11, редуктора 2 и цепной передачи 13 с ведущим колесом 9. Затем транспортное средство разгоняют за короткое вре20 мя до заданной скорости, переводят его в режим наката, отключая муфтой 14 двигатель 8 от ведущего колеса 9, после чего транспортное средство двиКогда колесо 7 установлено с экс- центриситетом, рама 2 при движении транспортного средства по ровной опорной поверхности совершает колеба- тельное вращательное движение вокруг оси вращения колеса 9, в результате
чего на подвеску 1 действуют гироскопические нагрузки, определяемые эксцентриситетом, радиусом ведомого коспортного средства, его базой и кинетическим моментом маховика 10, а корпус маховичного двигателя 8 совершает прецессионное движение относи- 55 тельно центра масс маховика 10. При идеально ровной опорной поверхности размещение центра масс маховика 10 на оси ведущего колеса 9 обеспечивает перемещения этого центра масс от3 1
носительно рамы 2 в продольном, по- перечном и вертикальном направлениях Однако из-за возмущений, накладываемых реальной опорной поверхностью, такие перемещения центра масс махо- вика 10 возможны. Их появление может повлечь за собой дополнительные энергетические потери, которые отде- ршть от потерь энергии при чисто ги- роскопических нагрузках очень трудно
Расположение амортизаторов 4. подвески 1 попарно в плоскостях, проходящих через ось вращения маховика 10 соединение их между собой трубопроводом 5 и шарнирное соединение их с корпусом двигателя 8 также способствует исключению вертикальных перемещений центра масс маховика 10, поскольку жидкость в амортизаторах
4 практически несжимаема, и возможные 20 спортного средства, а после пзмереперемещения сводятся к перемещению подвижного звена амортизатора 4. Перемещение подвижного звена одного из амортизаторов 4 вызывает такое же по величине, но противоположное по направлению перемещение второго амортизатора 4, связанного с первым трубопроводом 5, в результате чего корпус маховичного двигателя 8 поворачивается в плоскости расположения амортизаторов 4. Несколько пар (достаточно двух пар ) таких амортизаторов 4 обеспечат любые угловые и только угловые перемещения маховичного двигателя 8. Таким образом, нагрузки на подвеску 1 маховичного дви гат.еля 8 приближаются к чисто гироскопическим.
Характер гироскопических -нагрузок может быть заранее выбран и задан - изменением эксцентриситета на ведомом колесе 7. Закон изменения эксцентриситета может быть любой, исходя из конкретных целей эксперимента (например, для определения потерь в подвеске 1 при движении по различным дорогам, при переезде через пре тятствие. и т.д.).
Повышение точности диагностики способа и устройства обеспечивается появлением возможности определения - потерь в подвеске маховичного 55 двигателя 8 транспортного средства при действии гироскопическ их нагсрузок.
Ф о
рмула изобретения I. Способ диагностики подвески транспортного средства путем ра - гона транспортного средства до ладанной скорости, перевода его в режим наката, измерения пройденного им пути до остановки за счет накопленной кинетической энергии и определения потерь в подвеске по величине этого пути, отличающийся тем, что, с целью повышения точности диагностики подвески маховичного двигателя транспортного средства, перед, разго-ном последнего колеса одной из его осей устанавливают с эксцентриситетом, размещают транспортное средство на ровной спорней поверхности, разгоняют маховик, соединяют его вал с ведущими колесами тран5
0
5
0
5
0
5
ния пути устраняют эксцентриситет, повторнр разгоняют маховик, соединяют его вал с ведущими колесами, разгоняют транспортное средство до заданной скорости, переводят его в режим наката, измеряют пройденный путь до остановки транспортного средства, и по разности измеренных значений пути определяют потери в подвеске махови -него двигателя.
2. Устройство для диагностики П(д- вески транспортного средства, содержащее соединенную с подвеской раму с ведомыми, колесами и со связанным с двигателем и установленньм без эксцентриситета по меньшей мере одним ведущим колесом, о т л и ч а/ю- щ е е с я тем, что оно дополнительно снабжено средством создания эксцентриситета ведомых колес с осямт, не совпадающими с осью ведущего колеса, двигатель соединен с рамой посредством подвески, причем центр масс маховика двигателя расположен на оси ведущего колеса.
3.Устройство по п. 2, о т л и - чающеес-я тем, что средство изменения эксцентриситета снабжено приводом для принудительного регулирования эксцентриситета.
4.Устройство по пп. 2 и 3, отличающееся тем, что подвеска маховичного двигателя содержит
не менее одной пары амортизаторог, которые сообщены друг с д.ругом трубопроводом и размещены в плоскоспг, проходящей через ось вращештямаховп:;;: ,ту,1 равных расстояниях от последие.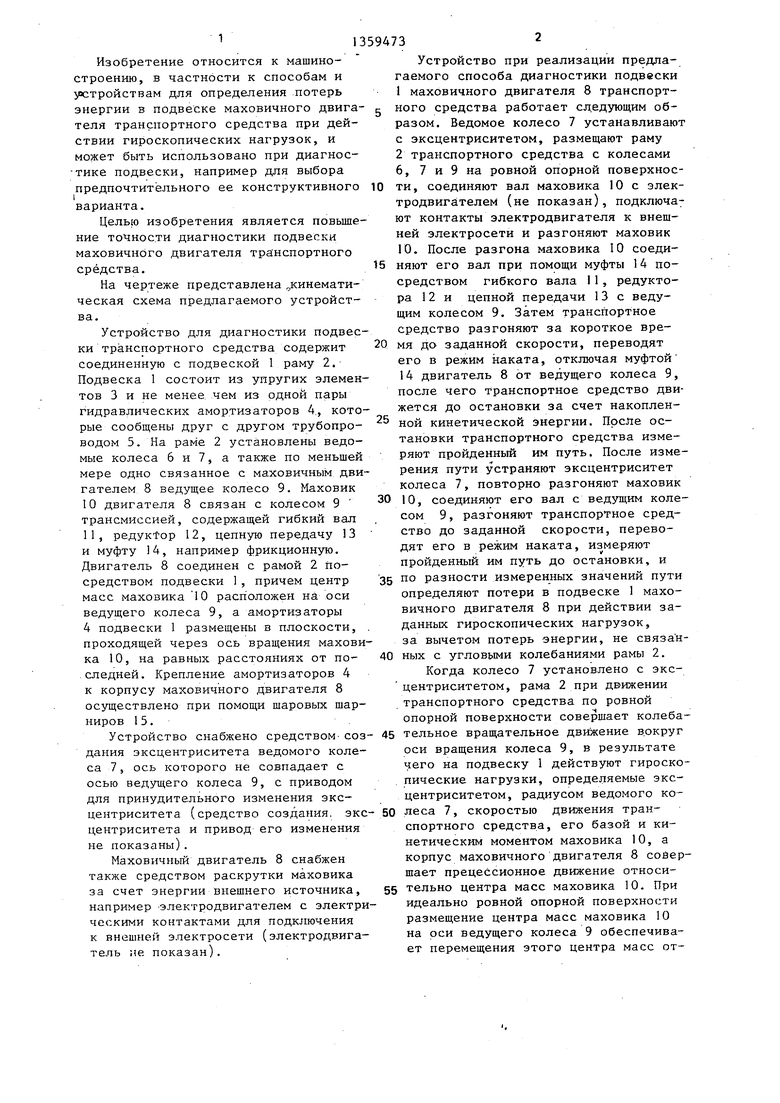
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕКУПЕРАТИВНАЯ МЕХАНИЧЕСКАЯ САМОРЕГУЛИРУЕМАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА С МАХОВИЧНЫМ НАКОПИТЕЛЕМ ЭНЕРГИИ | 2004 |
|
RU2261385C1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ СИЛОВЫХ УСТАНОВОК ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2330257C1 |
| Инерционная силовая установка транспортного средства | 1982 |
|
SU1094982A1 |
| Переносная моторная пила | 1976 |
|
SU844278A1 |
| СНЕГОХОД-ТРАНСФОРМЕР | 2010 |
|
RU2442716C1 |
| ОДНООСНОЕ КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2333862C1 |
| Привод вспомогательного оборудования | 1988 |
|
SU1654036A1 |
| Веломобиль | 1990 |
|
SU1838171A3 |
| ОДНОКОЛЕЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1993 |
|
RU2066651C1 |
| Малогабаритный трактор | 1990 |
|
SU1785922A1 |
Изобретение позволяет повысить точность диагностики подвески махо- вичного двигателя транспортного сред- ства (тс). Ведомое колесо 7 устанавливают с эксцентриситетом, разгоняют маховик 10 и соединяют его вал с ве- дущими колесами (ВК) 9 ТС. После измерения пути устраняют эксцентриситет, повторно разгоняют маховик и соединяют его вал с ВК. ТС разгоняют до заданной скорости и переводят в режим наката. Затем измеряют пройденный путь до остановки ТС и по разности измеренных значений пути определяют потери в подвеске маховичного двигателя 8. Ось средства создания эксцентриситета ведомых колес не совпадает с осью ВК и имеет привод принудительного регулирования эксцентриситета. Подвеска маховичного двигателя содержит не менее одной пары амортизаторов, сообщенных друг с другом трубопроводом 5. Такое выполнение позволяет исключить вертикальные перемещения центра масс маховика, так как жидкость в амортизаторах практически несжимаема, и возможные перемещения сводятся к перемещению подвижного звена амортизатора. Это позволяет считать, что на подвеску 1маховичного двигателя действуют чисто гироскопические нагрузки. Характер нагрузок м.б. заранее выбран и задан изменением эксцентриситета на ВК. Закон изменения эксцентриситета м.б. любой, исходя из конкретных целей экспер1 мента. 2с. и 23.п. ф-лы, I ил. (/ СО О1 4 СО
| Гулиа Н.В | |||
| Маховичные двигатели | |||
| М.: Машиностроение, 1976, с | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Фалькевич-Б.С | |||
| Теория автомобиля | |||
| М.: Машгиз, 1963, с | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
