Изобретение относится к сельскому хозяйству, а именно к устройствам автоматической подачи сыпучих кормов.
Цель изобретения - расширение функциональных возможностей за счет последовательной выдачи корма при одновременном контроле выдаваемой дозы.
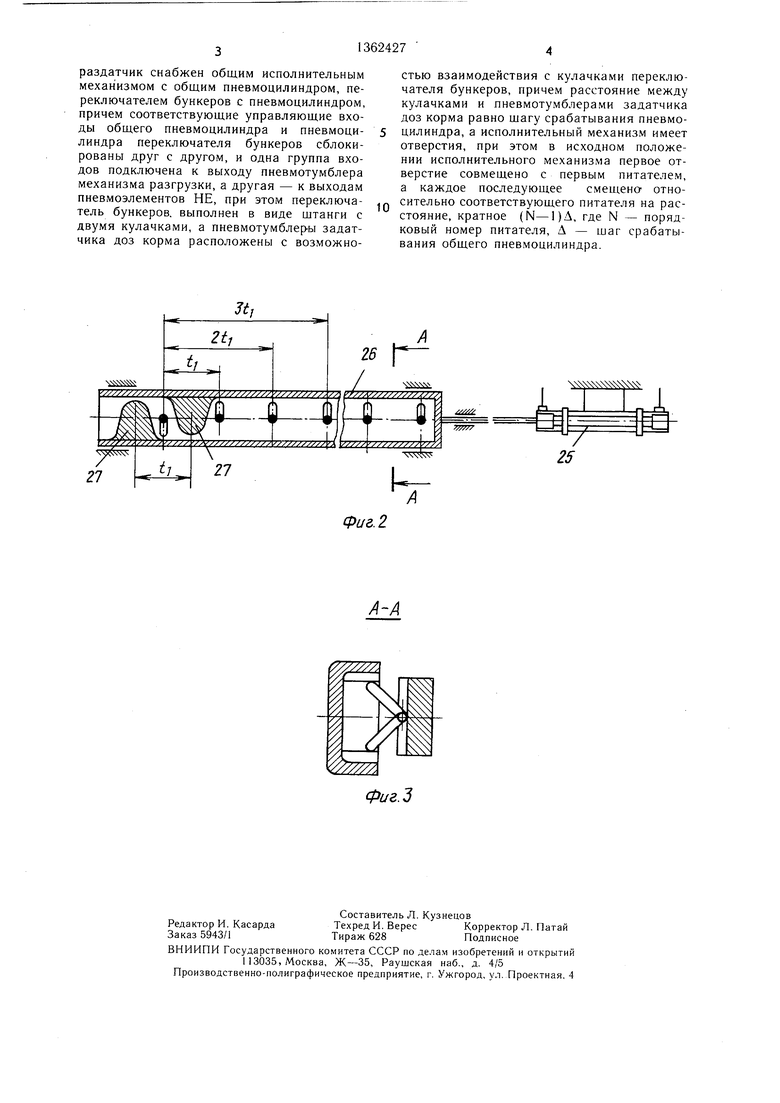
На фиг. 1 изображена принципиальная схема кормораздатчика; на фиг. 2 - пневмо- переключатель, продольный разрез; на фиг. 3 - сечение А-А на фиг. 2.
Кормораздатчик включает установленные под транспортером 1 питатели 2, под которыми размещены бункеры 3, имеющие механизмы 4 разгрузки. Бункеры посредством тяг 5 связаны с весоизмерительными устройствами 6, имеющими датчики 7 веса, с рычагами 8, сопла 9, соединенные через пневмодроссели 10 с источником 11 питания, заслонки 12 и пневмоэлементы НЕ 12, входы которых соединены с пневмотумблером 14 подачи питания, а выходы - с исполнительным механизмом питателей 15. Кормораздатчик имеет также задатчики 16 с дистанционным управлением доз корма, связанные через пневмоклапаны 17 с пневмотумб- лерами задатчиков 18 доз корма, пневмо- электрические преобразователи 19, соединенные с сигнальными индикаторами 20. Задатчики 16 доз корма с дистанционным управлением через пневмоклапаны 17 связаны с индикатором 21 доз корма. Пневмотумб- лер 22 связан с механизмом 4 разгрузки, противовесом 23, урановещивающим вес бункера 3 и весоизмерительного устройства 6, выполненного в виде дискретного компенсатора веса. Причем сопла 9 последних соединены с выходами пневмоэлементов НЕ 13, а датчики 7 веса - с задатчиками 16 дистанционного задания доз корма. Кормо- задатчик содержит также сблокированные между собой пневмоцилиндр 24 исполнительного механизма 15 и пневмоцилиндр 25 переключателя бункеров 26 с кулачками 27 для включения пневмотумблеров 18, шарнирные упоры 28, открывающие механизмы 4 разгрузки.
При включенном транспортере 1 корм посредством питателя 2 подается в бункер 3. Когда в бункер поступает требуемая доза корма, достигается равенство момента от действия веса бункера 3 с кормом и момента от действия датчика 7 веса на рычагах 8. При этом рычаг 8 поворачивается в обратном направлении и заслонка 12 закрывает сопло 9, Срабатывает пневмоэлемент НЕ 13, исполнительный механизм 15 сдвигается пневмоцилиндром 24 на щаг t, пере- питатель 2 над первым бункером и открывает над вторым. При этом все остальные питатели остаются закрытыми. Кулачки 27 сдвигаются пневмоцилиндром 25 на шаг t. Выключают задание дозы на- первый дозатор и включают задание дозы на второй дозатор.
В результате этого поступление корма в первый бункер прекращается, а сигнальный индикатор 20 этого бункера гаснет. После набора заданных доз корма во все бункеры 3 транспортер выключают. Выдача корма из бункеров 3 в кормушки животным (не показано) осуществляется включением пневмотумблера 22. При этом начинается обратное движение исполнительного механизма 15. Шарнирные упоры 28, взаимодействуя с механизмами 4 разгрузки, открывают дно бункеров 3. Во время рабочего движения исполнительного механизма 15 шарнирные упоры 28 при контакте с механизмами 4 разгрузки, поворачиваются в щарнирах, не воздействуя на дно бункера 3. Изменение дозы корма осуществляется задатчиками 16 и визуальным контролем по индикатору 21 включением пневмотумбле- ров 18.
Если в какую-либо из кормущек корм
подавать не нужно, то задатчик 16, соответствующий данной кормушке, настраивают на давление меньшее, чем начальное давление (условный нуль), соответствующее нулевой дозе. При это.м момент, создаваемый датчиком 7 веса, меньше, чем момент, создаваемый весом бункера 3 без корма. Поэтому сопло 9 закрыто, чем обеспечивается закрытое положение питателя 2.
Установка весоизмерительного устройства 6 на нуль осуществляется следующим образом. Задатчик 16 дистанционного задания дозы корма при порожнем бункере 3 устанавливают на нулевое значение перемещением противовеса 23 на рычаге 8 и достигают такого положения, когда начинается перемещение рычага 8 против часовой стрелки. При погружении бункера грузом-допуском питатель 2 закрывается.
Формула изобретения
40
Кормораздатчик, содержащий кормораздающии транспортер с питателями, под которыми размещены бункеры с разгрузочными механизмами, причем бункеры связаны посредством тяг с весоизмерительными устройствами, выполненными в виде датчиков
45 веса и дискретных компенсаторов веса, сопла которых через пневмодроссели связаны с входами пневмоэлементов НЕ, соединенных через пневмопреобразователи с сигнальными индикаторами, которые подключены к индикатору доз корма, а датчики веса
50 связаны с задатчиками доз корма с дистанционным управлением, которые через пневмоклапаны соединены с индикатором доз корма и пневмотумблерами задатчиков доз корма, пневмотумблер источника питания и пневмотумблер механизма разгрузки, от55
личающиися тем, что, с целью расширения функциональных возможностей за счет последовательной выдачи корма при одновременном контроле выдаваемой дозы, кормораздатчик снабжен общим исполнительным механизмом с общим пневмоцилиндром, переключателем бункеров с пневмоцилиндром, причем соответствующие управляющие входы общего пневмоцилиндра и пневмоци- линдра переключателя бункеров сблокированы друг с другом, и одна группа входов подключена к выходу пневмотумблера механизма разгрузки, а другая - к выходам пневмоэлементов НЕ, при этом переключатель бункеров, выполнен в виде щтанги с двумя кулачками, а пневмотумблер-ы задат- чика доз корма расположены с возможно
стью взаимодействия с кулачками переключателя бункеров, причем расстояние между кулачками и пневмотумблерами задатчика доз корма равно щагу срабатывания пневмоцилиндра, а исполнительный механизм имеет отверстия, при этом в исходном положении исполнительного механизма первое отверстие совмещено с первым питателем, а каждое последующее смещена относительно соответствующего питателя на расстояние, кратное (N-1)Д, где N - порядковый номер питателя, Д - щаг срабатывания общего пневмоцилиндра.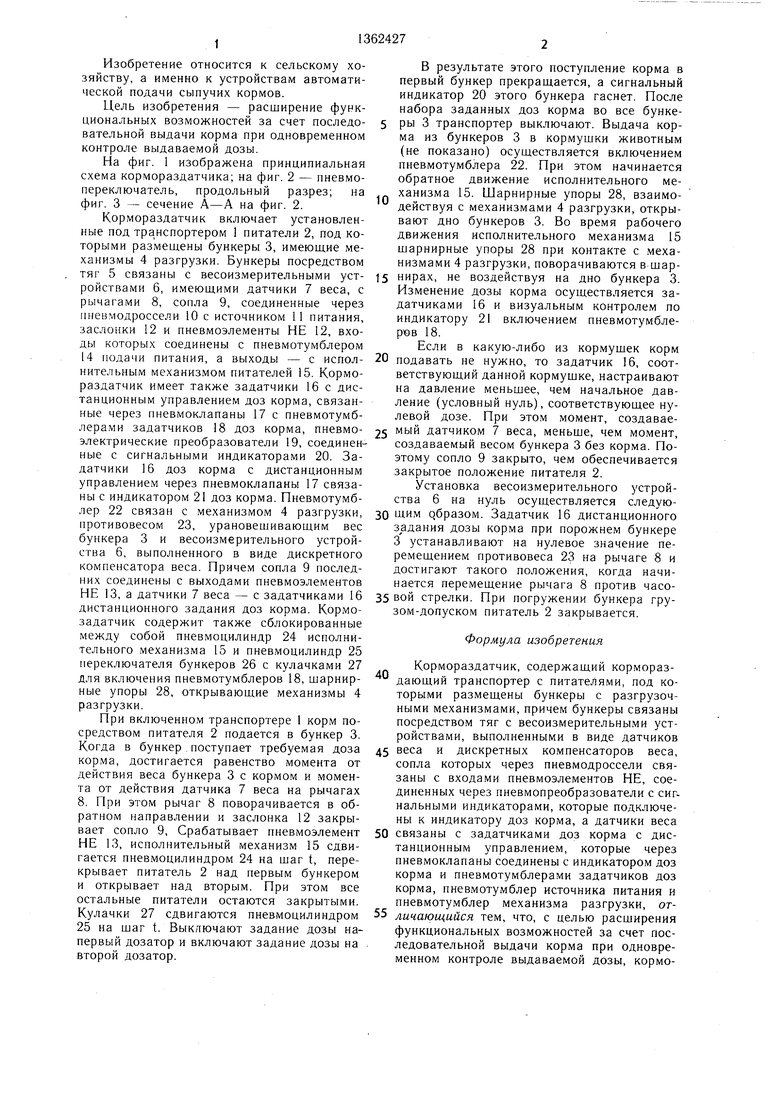
| название | год | авторы | номер документа |
|---|---|---|---|
| Кормораздатчик | 1981 |
|
SU959706A1 |
| Кормораздатчик с дистанционным управлением | 1977 |
|
SU644423A1 |
| Индивидуальный дозатор корма в зависимости от величины надоя | 1985 |
|
SU1416090A1 |
| Индивидуальный дозатор-увлажнитель корма | 1988 |
|
SU1674753A1 |
| Индивидуальный дозатор корма | 1988 |
|
SU1590059A1 |
| Способ раздачи кормов в устройство для его осуществления | 1986 |
|
SU1496730A1 |
| Манипулятор к доильным аппаратам | 1982 |
|
SU1113055A1 |
| Устройство дозирования корма при контрольном откорме свиней | 1982 |
|
SU1017238A1 |
| Пневматический весовой дозатор | 1988 |
|
SU1610304A1 |
| Устройство для управления весовым многокомпонентным дозатором | 1978 |
|
SU744489A1 |
Изобретение относится к области сельского хозяйства, а именно к устройствам автоматической раздачи сыпучих кормов. Целью изобретения является расширение функциональных возможностей за счет последовательной выдачи корма при одновременном контроле выдаваемой дозы кор.ма. Бункеры 3 посредством тяг 5 связаны с весоизмерительными устройствами 6. Когда в бункеры 3 поступает требуемая доза корма, заслонка 12 закрывает сопло 9 срабатывает пневмоэлемент -НЕ 13, и исполнительный механизм 15 сдвигается общим пневмо- цилиндро.м 24 на шаг t, перекрывает питатель 2 над первы.м бункером и открывает над вторым. При этом все остальные питатели остаются закрытыми. Аналогичным образом происходит заполнение остальных бункеров. При заполнении всех бункеров транспортер выключают. Выдача корма из бункеров 3 в кормушки осуш.ествляется включением пневмотумблера механизма разгрузки 22. Изменение дозы корма осуществляется задатчиками доз корма 16 и визуальным контролем по индикатору 21 включе- ченией пневмотумблеров 18. 3 ил. (Л 27 СО 05 NU 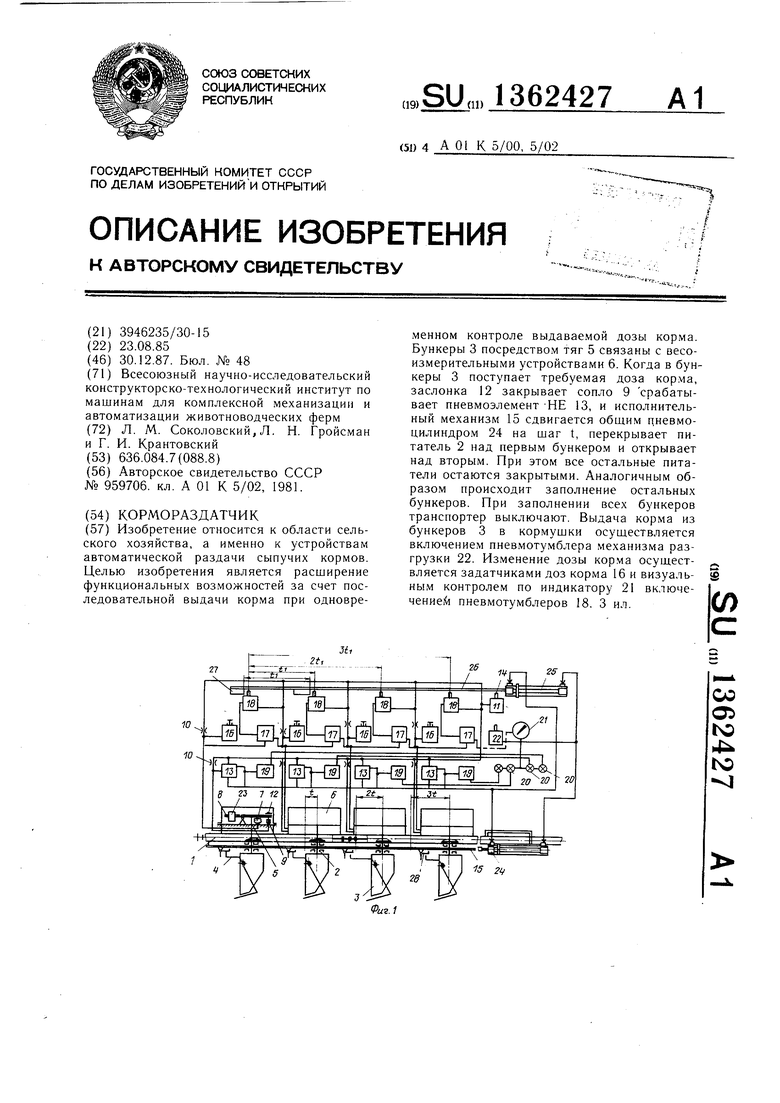
Фиг. 2
Фиг.д
| Кормораздатчик | 1981 |
|
SU959706A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
