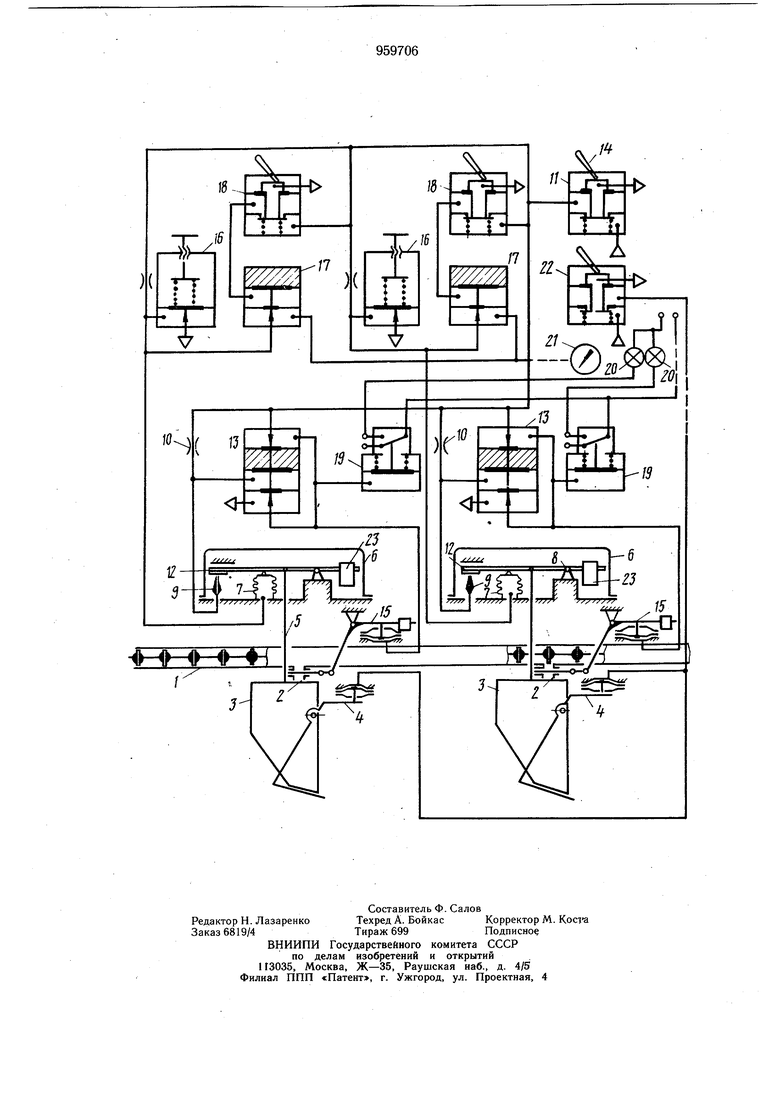
с рычагами 8, сопла 9, соединенные через пневмодроссели 10 с источником 11 питания, заслонки 12 и пневмоэлементы НЕ 13, входы которых соединены с пневмотумблером 14 подачи питания, а выходы - с исполнительными механизмами 15 питателей, задатчики 16 дистанционного задания доз корма, связанные через пневмоклапаны 17с пневмотумблерами 18, пневмоэлектрические преобразователи 19, соединенные с индикаторами 20, а индикатор 21 связан с задатчиками 16 дистанционного задания доз корма, пневмотумблер 22 и противовес 23, а весоизмерительные устройства 6 выполнены в виде дискретного компенсатора веса, причем сопла 9 последних соединены с входами пневмоэлементов 13 НЕ, а датчики 7 веса - с задатчиками 16 дистанционного задания доз корма. Для осуществления дистанционного управления кормораздатчиком задатчики 16 дистанционного задания доз корма, пневмоклапаны 17, пневмотумблеры 14, 18 и 22 и индикаторы 20 и 21 вынесены на пульт управления. Кормораздатчик работает следующим образом. В исходном положении транспортер 1 выключен, питатели 2 закрыты, в бункерах 3 корм отсутствует, а задатчиками 16 установлены требуемые дозы корма. Включением пневмотумблера 14 подается питание на пневмоэлементы устройства, Сжатый воздух с задатчиками 16 дистанционного задания дозы корма подается на датчик 7 веса. При этом рычаг 8 поворачивается и сопло 9 открывается. Поступающий воздух через пневмодроссели 10 через открытые сопла 9 выходит в атмосферу, поэтому на выходах пневмоэлементов НЕ 13 будет формироваться давление воздуха, равное давлению питания, и исполнительный механизм 15 открывает питатель 2.На пульте загорается индикатор 20. При включенном транспортере 1 корм посредством питателя 2 подается в бункер 3.Когда в бункер поступит требуемая доза корма, будет достигнуто равенство момента от действия веса бункера 3 с кормом и момента от действия датчика 7 веса на рычагах 8. При этом рычаг 8 повернется в обратном направлении и заслонка 12 закроет сопло 9, срабатывает пневмоэлемент НЕ 13, и исполнительный механизм 15 перекроет питатель 2. Поступление корма в бункер 3 прекратится, а индикатор 20 погаснет. После набора заданных доз корма по всем животным транспортер выключают. Выдача корма из бункеров 3 в кормушки животным (не показаны) осуществляется одновременным включением пневмотумблера 22 и действием механизмов 4 разгрузки. Изменение дозы корма осуществляется задатчиками 16 и визуальным контролем по индикатору 21 включением пневмотумблеров 1В. Если в какую либо из кормушек корм подавать не нужно, то задатчик 16, соответствующий данной кормущке, настраивают на давление меньшее, чем начальное давление (условный нуль), соответствующее нулевой дозе. При этом момент, создаваемый датчиком 7 веса, меньше, чем момент. создаваемый весом бункера 3 без корма, поэтому сопло 9 закрыто, чем обеспечивается закрытое положение питателя 2. Установка весоизмерительного устройства 6 на нуль осуществляется следующим образом. Задатчик 16 дистанционного задания дозы -корма при порожнем бункере 3 устанавливают на нулевое значение перемещением противовеса 23 на рычаге 8 и достигают такого положения, когда начинается перемещение рычага 8 против часовой стрелки, „ „р догружении бункера грузом-допуском питатель 2 должен закрываться. Вес грузадопуска меньше допускаемой погрешности дозирования. Таким образом, в кормораздатчике обеспечено упрощение конструкции и повьгщение точности дозирования. Формула изобретения Кормораздатчик, включающий установленные под транспортером питатели, под которыми размещены бункеры, связанные посредством тяг с весоизмерительными устройствами, имеющими датчики веса с рычагами, сопла, соединенные через пневмодроссели с источником питания, заслонки и пневмоэлементы НЕ, входы которых соединены с пневмотумблером подачи питания, а выходы - с исполнительными механизмами питателей, задатчики дистанционного задания доз корма, связанные через пневмоклапаны с пневмотумблерами задания доз корма, которые связаны с.пневмотумблером подачи питания, связанным с датчиками веса, при этом выходы пневмоэлементов НЕ через пневмоэлектрические преобразователи соединены с индикаторами. отличающийся тем, что, с целью упрощения конструкции и повышения точности дозирования корма, весоизмерительные устройства выполнены в виде дискретного компенсатора веса, причем сопла последних соединены с входами пневмоэлементов НЕ, а датчики веса - с задатчиками дистанционного задания доз корма. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 701615, кл. А 01 К 5/02, 1979. 2.Авторское свидетельство СССР № 644423, кл. А 01 К 5/02, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кормораздатчик | 1985 |
|
SU1362427A1 |
| Кормораздатчик с дистанционным управлением | 1977 |
|
SU644423A1 |
| Индивидуальный дозатор корма в зависимости от величины надоя | 1985 |
|
SU1416090A1 |
| Индивидуальный дозатор-увлажнитель корма | 1988 |
|
SU1674753A1 |
| Устройство дозирования корма при контрольном откорме свиней | 1982 |
|
SU1017238A1 |
| Устройство для управления весовым многокомпонентным дозатором | 1978 |
|
SU744489A1 |
| Пневматическое устройство управления весовым порционным дозатором | 1974 |
|
SU532015A1 |
| Устройство для дискретного весового многокомпонентного дозирования | 1973 |
|
SU510652A1 |
| Весовой порционный дозатор с устройством управления | 1980 |
|
SU1237914A1 |
| Индивидуальный дозатор корма | 1988 |
|
SU1590059A1 |