Изобретение относится к машиностроению, а именно к средствам контроля зубчатых передач.
с выходом компаратора 6, а выход - вторыми входами коммутатора 19, тре тьего ключа 21 и блока 17 управлени
Цель изобретения - расширение функ- дешифратор 24 нуля, вход которого;
IF
20
25
30
циональных возможностей путем обеспечения контроля мертвого хода следящего привода.
На чертеже изображена блок-схема устройства для контроля кинематичес- ю кой погрешности передач.
Устройство включает в себя импульсные датчики 1 и 2 углов поворота ведущего и ведомого звеньев 3 передачи, подключенные к ним два реверсивных счетчика 4 и 5 импульсов, (счетчик 4 - к датчику 2, а счетчик 5 - к датчику 1), компаратор 6, связанный первым входом с выходом первого реверсивного счетчика 4, два кодонабирателя 7 и 8, один из которых (например, 7) связан с вторым входом компаратора 6, оперативный запоминающий блок 9, два ключа 10 и 11, счетчик 12 адреса, блок 13 вычитания, множительный блок 14, вход которого соединен с кодонабирателем 8, запоминающий блок 15, регистрирующий блок 16, соединенный с выходом запоминающего блока 15, . блок 17 управления, первый вход которого связан с выходом регистрирующего блока 16, первый выход - с вторым входом запоминающего блока .15, второй выход - с вторым входом второго ключа 11, делитель 18, соединенный первым входом с выходом импульсного датчика 2 ведомого звена, коммутатор 19, первый вход которого соединен с выходом второго реверсивного счетчика 5, первый выход коммутатора
19соединен с первым входом первого оперативного запоминающего блока 9, второй оперативный запоминающий блок 20, первый вход которого соединен с вторым выходом коммутатора 19, вторые входы оперативных заг оминающих блоков 9 и 20 соединены с вьжодами первого и второго ключей 10 и 11 соответственно, выходы первого и второго оперативных запоминающих блоков 9 и
20соединены соответственно с первым и вторым входами блока 13 вычитания, последовательно соединенные третий
и четвертый ключи 21 и 22, включенные между выходом делителя 18 и первым входом счетчика 12 адреса, выход которого связан с первыми входами первого и второго ключей 10 и 11, триггер 23, первый вход которого соединен
35
40
45
50
соединен с выходом первого реверсив ного счетчика 4, выход - с третьим входом блока 17 управления, выход блока 13 вычитания через множительный блок 14 соединен с входом запоминающего блока ТЗ, третий выход бл ка 17 управления подключен к вторым входам реверсивных счетчиКов 4 и 5 триггера 23, счетчика 12 адреса и делителя 18 соответственно, четвертый выход - к второму входу первого ключа 10, пятый выход - к второму входу четвертого ключа 22, шестой выход - к третьим входам делителя 1 и счетчика 12 адреса соответственно седьмой выход - к четвертому входу счетчика 12 адреса, восьмой выход - к третьему входу множительного блок 14, а девятый выход предназначен дл подключения контролируемой передачи
Кроме того, на чертеже позициями 25 и 26 обозначены кнопки пуска и. регистрации соответственно.
Устройство работает следующим об разом.
Перед началом измерений на кодонабирателе 7 устанавливают число N, определяющее интервал (диапазон) контроля. Например, если нужно проконтролировать следящий привод на полном обороте ведомого звена, то на кодонабирателе 7 устанавливается число импульсов, вырабатываемых дат чиком 2 за полный оборот (например, N 10800). Устанавливают на делите ле 18 коэффициент п деления числа импульсов, следующих с датчика 2 (о ределяют число контролируемых полож ний привода, например, гфи п 1 пр вод контролируется в положениях,соо ветствующих каждому импульсу, выраб танному датчиком 2; при п 2 или 3 привод контролируется в положениях, соответствующих второму или третьем импульсам датчика 2 и т.д.).
На кодонабирателе 8 устанавливаю угловую цену импульса датчика 1 -А Затем включают контролируемый следя щий привод кнопкой 25 пуска. При это 55 блок 17 управления вырабатывает сиг налы на третьем и пятом выходах. По сигналу с третьего выхода сбрасы ваются на ноль реверсивные счетчики 4 и 5, счетчик 12 адреса и делитель
с выходом компаратора 6, а выход - с вторыми входами коммутатора 19, третьего ключа 21 и блока 17 управления.
0
5
0
5
0
5
0
соединен с выходом первого реверсивного счетчика 4, выход - с третьим входом блока 17 управления, выход блока 13 вычитания через множительный блок 14 соединен с входом запоминающего блока ТЗ, третий выход блока 17 управления подключен к вторым входам реверсивных счетчиКов 4 и 5 триггера 23, счетчика 12 адреса и делителя 18 соответственно, четвертый выход - к второму входу первого ключа 10, пятый выход - к второму входу четвертого ключа 22, шестой выход - к третьим входам делителя 18 и счетчика 12 адреса соответственно, седьмой выход - к четвертому входу счетчика 12 адреса, восьмой выход - к третьему входу множительного блока 14, а девятый выход предназначен для подключения контролируемой передачи.
Кроме того, на чертеже позициями 25 и 26 обозначены кнопки пуска и. регистрации соответственно.
Устройство работает следующим образом.
Перед началом измерений на кодонабирателе 7 устанавливают число N, определяющее интервал (диапазон) контроля. Например, если нужно проконтролировать следящий привод на полном обороте ведомого звена, то на кодонабирателе 7 устанавливается число импульсов, вырабатываемых датчиком 2 за полный оборот (например, N 10800). Устанавливают на делителе 18 коэффициент п деления числа импульсов, следующих с датчика 2 (определяют число контролируемых положений привода, например, гфи п 1 привод контролируется в положениях,соответствующих каждому импульсу, выработанному датчиком 2; при п 2 или 3 привод контролируется в положениях, соответствующих второму или третьему импульсам датчика 2 и т.д.).
На кодонабирателе 8 устанавливают угловую цену импульса датчика 1 -А. Затем включают контролируемый следящий привод кнопкой 25 пуска. При этом 55 блок 17 управления вырабатывает сигналы на третьем и пятом выходах. По сигналу с третьего выхода сбрасываются на ноль реверсивные счетчики 4 и 5, счетчик 12 адреса и делитель
3
18, а по сигналу с пятого выхода открывается ключ 22. Триггер 23 коммутирует коммутатор 19 на оперативный запоминающий блок (ОЗБ) 9. Одновременно блок 17 управления вырабатывает сигнал на четвертом выходе на открытие первого ключа 10 (второй ключ 11 при этом закрыт). Сигналы с датчиков 1 и 2 поступают на соответствующие реверсивные счетчики 4 и 5 импульсов. Со счетчика 5 сосчитанное текущее значение числа импульсов через коммутатор 19 поступает на ОЗБ 9, в котором значение числа импульсов, поступивших с датчика ведущего звена при данном направлении движения, которое будем считать прямым, записывается в соответствующие ячейки памяти. Запись осуществляется по команде счетчика 12 адреса, который управляется через третий и четвертый ключи 21 и 22, делитель 18 импульсами датчика 2. Таким образом, в ОЗБ 9 записывается массив количества импульсов, характеризующих положение ведущего звена, соответствующих контролируемым положениям ведомого звена при прямом направлении движения.
Б момент времени, когда счетчик 4 сосчитывает число импульсов, соответствующих установленному на кодонабирателе 7 числу N (устанавливающему диапазон контроля), компаратор 6 перебросит триггер 23 во. второе положение. При этом положении триггера 23 коммутатор 19 будет переключен на ОЗБ 20, третий ключ 21 закроется, а блок 17 управления выработает следующие сигналы: на шестом выходе - на сброс счетчика 12 адреса и делителя 18, на втором выходе - на открытие второго ключа 11, на девятом выходе на устройство реверса следящего привода с прямого на обратное. Когда на реверсивном счетчике 4 импульсов снова установится число N, компара-, тор 6 перебросит триггер 23 снова в первое положение и третий ключ 21 откроется. В ОЗБ 20 начинает записываться массив количества импульсов, характеризующих положение ведущего звена, соответствующих тем же самым контролируемым положением ведомого звена, но при обратном направлении
движения.
I Когда ведомое звено займет начальное (нулевое) контролируемое положе62912 4 .
ние, дешифратор 24 нуля подаст сигная на блок 17 управления, который сигналом на пятом выходе закроет четвер- g тый ключ 22, а первый и второй ключи 10 и 11 .откроет сигналами с второго и четвертого вькодов. На этом заканчивается этап записи информации в память ОЗБ, и можно приступать к ее
10 обработке для вычисления и регистрации мертвого хода следящего привода. Этап вычислений и регистрации начинается с Нажатия кнопки 26 регистрации (при желании эта операция может
15 производиться автоматически по сигналу от дешифратора 24 нуля). При этом блок 16 регистрации результатов тактирует блок 17 управления, за давая ему скорость выдачи управляющих
20 сигналов с первого, седьмого и восьмого выходов, сдвинутых по времени с помощью линий задержек. По сигналу с седьмого выхода, поступаЬщему на счетчик 12 адреса, числа импульсов
25 , Kg, , записанные в соответствующие ячейки ОЗБ 8 и 20, соответствующие одному и тому же i-му положению ведомого звена, но при разных направлениях его вращения, поступают в
30 блок 13 вычитания. В блоке 13 вычитания находится разность импульсов - дК;, обусловленная упругим и люфто- вым мертвым ходом привода в i-м контролируемом положении, т.е. К;
35 . 71 KB; .
Эта разность поступает на вход множительного блока 14, в котором осуществляется ее перемножение по
40 команде управляющего сигнала с восьмого выхода блока 17 управления на угловую цену импульса - А, набранную на кодонабирателе 8. С выхода множительного блока 14 на запомина45 ющий блок 15 поступает, таким образом значение мертвого хода ведущего звена следящего привода:
uju; А лК; ,
Полученное значение величины мертвого хода по команде управляющего сигнала поступает на регистрирующий блок 16. После регистрации значения мертвого хода в i-м положении регистрирующий блок 16 снова выдает тактирующий сигнал на блок 17 управления, и цикл вычисления и запись мертвого хода повторяется для следующего контролируемого положения следящего привода.
Формула изобретения
Устройство для контроля кинематической погрешности передач, содержащее импульсные датчики углов поворота ведущего и ведомого звеньев,под ключенные к ним соответственно два реверсивных счетчика импульсов, компаратор, связанный первым входом с выходом первого реверсивного счетчик два кодонабирателя, один из которых связан с вторьм входом компаратора, оперативный запоминающий блок, два ключа, счетчик адреса, блок вычитания, множительный блок, вход которог соединен с вторым кодонабирателем, запоминающий блок, регистрирующий блок, соединенный с выходом запоминающего блока, блок управления,первы вход которого связан с выходом регистрирующего блока, первый выход - с BTopbtM входом запоминающего блока, второй выход - с вторым входом второго ключа, отличающееся тем, что, с целью расширения функциональной, возможности путем обеспечения контроля мертвого хода следящего привода, оно снабжено делителем, соединенным первым входом с выходом импульсного датчика ведомого звена, коммутатором, первьй вход которого соединен с выходом второго реверсивного счетчика, первый выход коммутатора соединен с первым входом первого оперативного запоминающего блока.
Составитель Б, Афонский Редактор М Петрова Техред Л.Олейник Корректор В. Бутяга
Заказ 6354/26Тираж 677Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
вторым оперативным запоминающим блоком, первый вход которого соединен, с вторым выходом коммутатора, вторые входы оперативных запоминающих блоков соединены с выходами первого и второго ключей соответственно, выходы первого и второго оперативных запоминающих блоков соединены соответственно с первым и вторым входами блока вычитания, последовательно соединенными третьим.и четвертым ключами, включенными между выходом делителя и первым входом счетчика адреса, выход которого связан с первыми входами первого и второго ключей, триггером, первый вход которого соединен с выходом компаратора, а выход - с вторыми входами коммутатора, третьего ключа и блока управления, дешиф- . ратором нуля, вход которого соединен с выходом первого реверсивного счет--, чика, выход - с третьим входом блока управления, выход блока вычитания 5 через множительный блок соединен с входом запоминающего блока, третий выход блока управления подключен к вторим входам реверсивных счетчиков, триггера, счетчика адреса и делителя
5
0
соответственно, четвертый выход - к второму входу первого ключа, пятый выход - к второму входу четвертого ключа, шестой выход - к третьим вхоам делителя и счетчика адреса соответственно, седьмой выход - к четвертому входу счетчика адреса, восьмой выход - к третьему входу множительного блока, а девятый выход предназначен для подключения контролируемой передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематической погрешности передач | 1985 |
|
SU1270550A1 |
| Устройство для измерения погрешностей деления лимбов | 1986 |
|
SU1411583A1 |
| Устройство поиска шумоподобного сигнала | 1988 |
|
SU1540020A1 |
| Стенд для испытания энергоустановок электромобилей | 1985 |
|
SU1255890A1 |
| Устройство для измерения мощности | 1990 |
|
SU1751685A1 |
| Устройство для измерения колебаний скорости перемещения | 1985 |
|
SU1303944A1 |
| Устройство вибродиагностики динамических объектов | 1982 |
|
SU1070490A1 |
| Устройство для контроля погрешностей лимбов | 1986 |
|
SU1384951A1 |
| Устройство поиска псевдослучайной последовательности | 1991 |
|
SU1788592A1 |
| Многоканальный регулятор температуры | 1982 |
|
SU1091139A1 |
Изобретение относится к машиностроению, а именно к средствам контроля зубчатых передач. Цель изобретения - расширение функциональных возможностей путем обеспечения контроля мертвого хода следящего привода. Это достигается тем, что в устройство введено два оперативных запоминающих блока 9 и 20, подключённых через коммутатор 19 к выходу реверсивного счетчика 5 импульсов датчика 1 ведущего звена следящего привода. В оперативные запоминающие блоки 9 и 20 записываются с помощью счетчика 12 адреса число импульсов, характеризующее положение контролируемого привода при прямом и обратном ходах. Значение мертвого хода получают с помощью бло- ка 13 вычитания и множительного блока 14 и передают в запоминающий блок 15,а затем - в регистрирующий блок 16,1 ил. Q (Л 7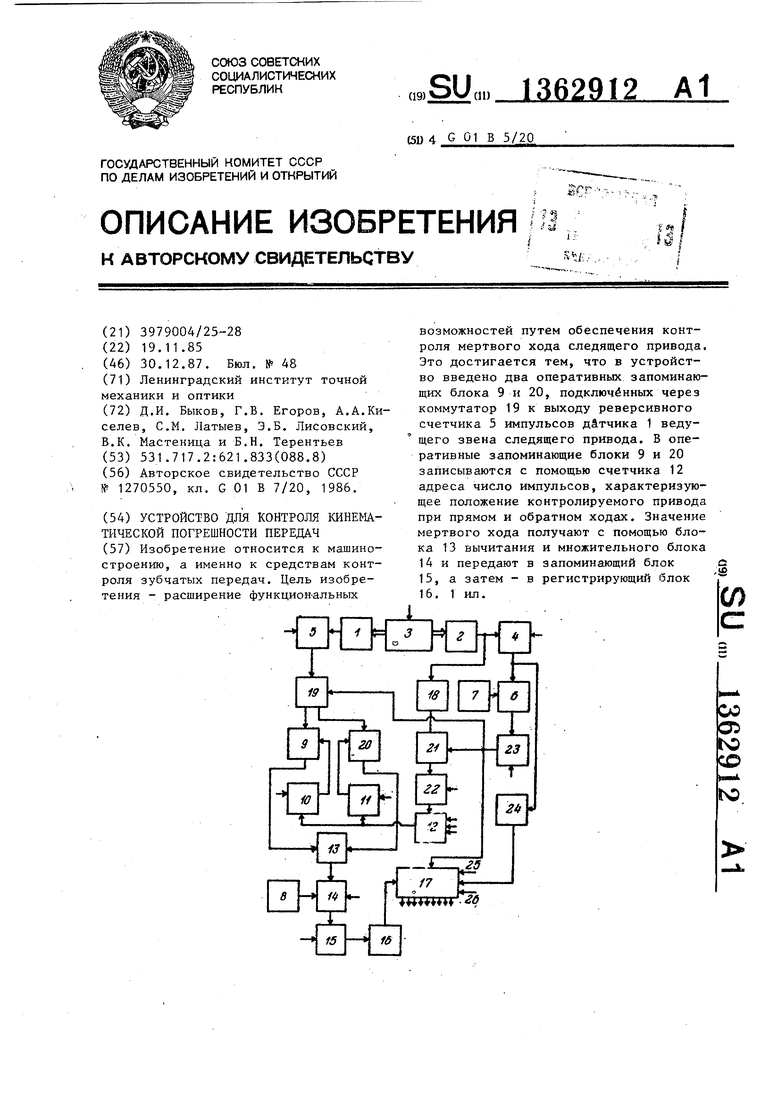
| Устройство для контроля кинематической погрешности передач | 1985 |
|
SU1270550A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
