Изобретение относится к автоматике и может быть использовано в системах программного управления робото техническими комплексами,
Цель изобретения - повышение быст родействия и упрощение устройства.
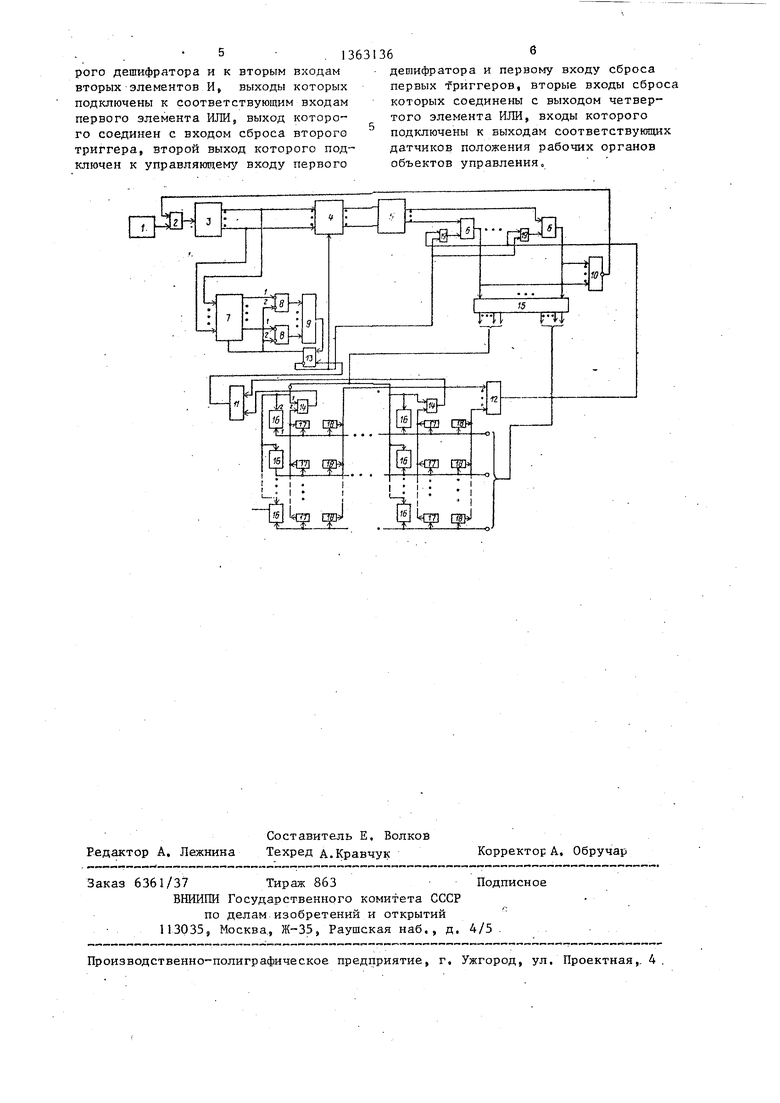
На чертеже представлена функциональная схема устройства для программного управления.
Устройство содержит генератор 1 импульсов, первый элемент И 2, счетчик 3 импульсов, первый дешифратор 4, блок 5 набор а программ, первые
20
25
30
35
триггеры (Тг) 6, второй дешифратор 7, 15 ров.6, При любом состоянии счетчика вторые элементы И 8, первый элемент ИЛИ 9i второй элемент ИЛИ 10, третий , элемент ИЛИ 11, четвертый элемент ИЛИ 12, второй триггер 13, третьи элементы И 14, шифратор 15, объекты 16 управления, датчики 17 состояния объектов управления, датчики 18 положения раб.очих органов объектов управления и элементы 19 развязки.
Устройство программного управления конструктивно выполнено в виде двух узлов: цен грального, включающего генератор 1 импульсов, счетчик 3 импульсов, дешифраторы 4 и 7, блок 5 набора программ, триггеры 6 и 13, элементы И 2 и 8, элементы ИЛИ 9 и 10, шифратор 15 и элементы 19 развязки, и периферийного, содержащего объекты 16 управления, датчики 17 .состояния объектов управлений, датчики 18 положения рабочих органов объектов управления, элементы И 14 и элементы ИЛИ 11 и 12, Эти два узла в зависимости от конструктивного исполнения робототехнического комп лекса могут находиться на значительном расстоянии друг от друга и соединяться между собой посредством кабеля (линий связи).
Устройство программного управления работает следующим образом.
Перед началом работы обнуляются счетчик 3 импульсов и все триггеры . 6, а триггер 13 устанавливается в единичное состояние. С прямого выхода триггера 13 снимается единичный сигнал, который по ступает на вторые входы элементов И 8 и управляющий вход дешифратора 7, запрещая поступление импульсов на дешифратор 7, а с инверсного выхода триггера 13 снимается нулевой сигнал, который раз решает поступление импульсов со счётчика 3 на дешифратор 4, На втором
3 импульсов; управляющий сигнал появляется только на одном из выходов блока 5 набора программ. .Этот сигнал устанавливает соответствующий триггер 6 в -единичное состояние и формирует сигнал с элемента ИЛИ 10, запрещающий прохождение тактовых импульсов с генератора 1 через элемент И 2 на вход счетчика 3 импульсов. Сигнал с этого же триггера 6 поступает на вход шифратора 15. На его выходах формируются одновремен- но сигналы в соответствии с алго,- ритмом включения объектов управления. Эти сигналы по линиям связи поступают на входы выбранного объекта управления, при этом срабатывает исполнительный элемент, т,е, включается объект управления. Кроме того, сигнал с второй группы выходов шифратора 15 поступает на первые входы элементов И 14, сигнал с перво группы выходов - на входы датчика 17 Состояния объекта управления и 40 датчика 18 положения рабочего органа объекта управления. Если же выбранный объект управления исправен, то на второй вход элемента И 14 поступает нулевой сигнал от датчика 17 состояния, т.е. элемент И 14 заперт. При достижении рабочим органом объекта управления заданного положения срабатывает датчик 18 положения и на его выходе появляется единичный сигнал, которьй поступает на вход четвертого элемента ИЛИ 12 и через элемент 19 развязки на второй вход сброса триггера 6, который переключается в нулевое состояние, выключая хём самым объект 16 управ45
50
55
ления, датчики 17 и 18 и формируя сигнал, поступающий через элемент ИЛИ 10 на второй вход элемента И 2, который разрешает прохождение импуль
входе элемента И 2 действует сигнал разрешения, и с выхода генератора 1 импульсов через первый вход элемента И 2 на счетный вход счетчика 3 импульсов поступают тактовые импульсы. Код на выходах этого счетчика поступает на информационные входы первого дешифратора 4, на выходах которого появляются сигналы, поступакяцие на соответствующие входы блока 5 набора программы, и с его выхода снимаются управляющие сигналы, поступающие на установочные входы триггеров.6, При любом состоянии счетчика
0
5
0
5
5 ров.6, При любом состоянии счетчика
3 импульсов; управляющий сигнал появляется только на одном из выходов блока 5 набора программ. .Этот сигнал устанавливает соответствующий триггер 6 в -единичное состояние и формирует сигнал с элемента ИЛИ 10, запрещающий прохождение тактовых импульсов с генератора 1 через элемент И 2 на вход счетчика 3 импульсов. Сигнал с этого же триггера 6 поступает на вход шифратора 15. На его выходах формируются одновремен- но сигналы в соответствии с алго,- ритмом включения объектов управления. Эти сигналы по линиям связи поступают на входы выбранного объекта управления, при этом срабатывает исполнительный элемент, т,е, включается объект управления. Кроме того, сигнал с второй группы выходов шифратора 15 поступает на первые входы элементов И 14, сигнал с первой группы выходов - на входы датчика 17 Состояния объекта управления и 0 датчика 18 положения рабочего органа объекта управления. Если же выбранный объект управления исправен, то на второй вход элемента И 14 поступает нулевой сигнал от датчика 17 состояния, т.е. элемент И 14 заперт. При достижении рабочим органом объекта управления заданного положения срабатывает датчик 18 положения и на его выходе появляется единичный сигнал, которьй поступает на вход четвертого элемента ИЛИ 12 и через элемент 19 развязки на второй вход сброса триггера 6, который переключается в нулевое состояние, выключая хём самым объект 16 управ5
0
5
ления, датчики 17 и 18 и формируя сигнал, поступающий через элемент ИЛИ 10 на второй вход элемента И 2, который разрешает прохождение импуль3 1
сов с генератора 1 на вход счетчика 3. Цикл работы повторяется, т.е. импульс с генератора 1 поступает на счетчик 3 импульсов, на выходе дешифратора 4 появляется новый код, который расшифровывает в блоке 5 набора программ команду, включающую следующий объект 16 управления.
Если при включении очередного объекта 16 управления окажется, что он неисправен, то единичный сигнал с выхода датчика 17 состояния поступит на второй вход элемента И 14, а с его выхода через третий элемент ИЛИ 11 - на первый вход триггера 13 и вызовет его переключение в нулевое состояние. При этом сигнал с его прямого выхода поступит на вторые входы элементов И 8 и управля- ющий вход дешифратора 7, разрешая прохождение информации с выхода счетчика 3 импульсов на выход дешифратора 7, а с инверсного выхода триггера 13 сигнал поступает на второй вход дешифратора 4, запрещая поступление информации на его выход. Одновременно сигнал с инверсного выхода триггера 13 поступает через элемент 19 развязки на второй вход сбро са триггера 6 и переключает его в нулевое состояние, отключает объект 16 управления и соответствующие датчики 17 и 18, также этот сигнал через элемент ИЛИ 10 поступает на второй вход элемента И 2 и разрешает прохождение импульсов с выхода генератора 1 на вход счетчика 3 импульсов. Элементами И 8 задается код, определяющий количество команд прог- раммы, которые необходимо пропустить из-за неисправности объекта управления. В этом режиме работы импульсы, поступающие с генератора 1 через от- крытьй элемент И 2, проходят в счетчик 3. Содержимое счетчика расшифровывается дешифратором 7, и на его выходах формируется код, который поступает на первые входы элементов И 8, Тот элемент, у которого пришедший с выхода дешифратора 7 код совпал с установленным, срабатывает, и на его выходе появляется сигнал, переключающий через элемент ИЛИ 9 триггер 13 в единичное состояние. Это вызывает изменение сигналов на его выходах. На прямом выходе устанавливается сигнал, запрещающий поступление информации с выходов счет
5 о п
5
5
0
5
36
чика 3 на выходы дешифратора 7 и сравнение кодов на элементах И 8. На инверсном выходе триггера 13 устанавливается сигнал, разрешающий прохождение информации с выходов счетчика 3 импульсов на выходы дешифратора 4. При этом в блоке 5 набора прог- рамм будут выбираться команды управления, соответствующие другому участку программы, и цикл работы повторится по первоьгу или второму режимам в зависимости от состояния вновь включенного объекта управления.
Формз ла изобретения
Устройство для программного уп-; равления, содержащее датчики состояния объектов упраапения, датчики положения рабочих органов объектов управления, генератор импульсов, подключенный выходом к первому входу первого элемента И,, выход которого соединен с входом счетчика импульсов, подключенного выходами к информационным входам первого и второго дешифраторов, блок набора программ, входы которого соединены с выходами первого дешифратора, а выходы - с установочными входами первых триггеров, вторые элементы И, подключенные первыми входами к соответствующим выходам ВТОР9ГО дешифратора, первый элемент ИЛИ, второй триггер, третьи элементы И и второй элемент ИЛИ, выход которого соединен с вторым входом первого элемента И, отличающееся тем, что, с целью повьш1ения быстродействия и упрощения устройства, в введены шифратор, третий и четвертый элементы ИЛИ, причем входы шифратора соединены с выходами первых триггеров и входами второго элемента ИЛИ, первая группа выходов шифратора подключена к входам соответствую- датчиков состояния и датчиков положения рабочих органов объектов управления, вторая группа выходов шифратора соединена с первыми входами третьих элементов И, вторые входы которых подключены к выходам соответствующих датчиков состояния объектов управления, а выходы - к соответствующим входам третьего элемента ИЛИ, выход которого соединен с установочным входом второго триггера, первый выход которого подключен к управляющему входу второго дешифратора и к вторым входам вторых элементов И, выходы которых подключены к соответствующим входам первого элемента ИЛИ, выход которого соединен с входом сброса второго триггераJ второй выход которого подключен к управляющему входу первого
дешифратора и первому входу сброса первых триггеров, вторые входы сброса которых соедине}Пз1 с выходом четвертого элемента ИЛИ, входы которого подключены к выходам соответствующих датчиков положения рабочих органов объектов управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1984 |
|
SU1182488A1 |
| Устройство для программного управления | 1985 |
|
SU1267362A2 |
| Устройство для программного управления | 1985 |
|
SU1273883A1 |
| Устройство программного управления | 1981 |
|
SU1012205A1 |
| Устройство для программного управления и контроля циклическими процессами | 1985 |
|
SU1310776A1 |
| Устройство для автоматического управления обслуживанием объектов | 1970 |
|
SU652532A1 |
| Устройство для программного управления | 1987 |
|
SU1596307A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1991 |
|
RU2042169C1 |
| Устройство для обучения операторов | 1986 |
|
SU1411801A1 |
| Устройство для ввода-вывода информации при обработке физических величин | 1981 |
|
SU966683A1 |
.Изобретение относится к технике автоматического управления и может быть использовано в системах программного управления робототехни- ческими комплексами. Цель изобретения - повьшение быстродействия и упрощение устройства. Устройство содержит датчики состояния объектов управления, датчики положения рабочих органов объектов управления, генератор импульсов, первый, второй дешифраторы, первый, вторые и третьи элементы И, блок набора программ, первые и второй триггеры, первый, второй, третий и четвертый элементы ИЛИ, шифратор, Шифра ор обеспечивает включение нужного объекта управления. Третий элемент ИЛИ создает сигнал, в соответствии с которым отключается объект управления и пропускается заданное число шагов программы в случае, если объект управления неисправен. Неисправность объекта управления регистрируется датчиком состояния. Срабатывание четвертого элемента ИЛИ и переход к следующему шагу программы происходит по достижении объектом управления заданного положения, которое регистрируется датчиком положения. 1 ил. о (Л со 05 ОР 00 а
Редактор А, Лежнина
Составитель Е, Волков Техред А.Кравчук
Заказ 6361/37 Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва., Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная,. 4
Корректор А, Обручар
| Устройство для программного управления | 1975 |
|
SU537328A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления | 1979 |
|
SU938262A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство программного управления | 1981 |
|
SU1012205A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
