Изобретение относится к системам автоматического управления транспортными средствами, которые перемещаются по заданной трассе-ориентиру, и может быть использовано, например, для управления внутрицеховым робокаром в гибком автоматизированном производстве.
Известна система управления транспортным средством [1] которая содержит датчик слежения за светоотражающей полосой, позволяющий по сигналам управления переключаться с режима слежения за центром полосы на режим слежения за одним из ее краев, а также формировать сигнал точной остановки транспортного средства в заданных точках трассы, датчик пройденного пути, блок сравнения, счетчик команд, блок памяти команд и уставок, блок режимов движения, привод и рулевой привод.
Недостатками системы управления являются низкая точность управления и сложность.
Известно устройство для управления движением транспортного средства [2] которое автоматически формирует кратчайший маршрут движения и команды его реализации, идентифицирует станции назначения и точный останов транспортного средства около маркера станции назначения. В блоке адресной памяти хранятся код следующей станции, признак движения над экранированным участком трассы-ориентира и признак останова, которые считываются из него при обнаружении маркера станции первым датчиком маркеров и на основании которого вырабатываются команды подключения датчиков слежения, включения привода движения в режим быстрого или медленного движения с последующим отключением привода движения и включением привода торможения при обнаружении маркера станции назначения вторым датчиком маркеров.
Недостатком этого устройства является низкая точность управления движением транспортного средства.
Наиболее близким к предлагаемому является устройство для управления положением объектa [3] выбранное в качестве прототипа. Устройство содержит задатчик курса (кабель), уложенный в полотно дороги, задающий генератор, датчики положения, усилители мощности, блок сравнения, исполнительный механизм, сумматор, регулятор скорости и фильтры.
Недостатком устройства-прототипа является малая точность слежения за положением объекта.
Целью изобретения является устранение указанного недостатка.
Цель достигается тем, что в устройство для управления положением объекта, содержащее задатчик курса, размещенный на трассе движения, два датчика положения и блок коррекции, введены первый и второй цифроаналоговые преобразователи (ЦАП), блок управления и блок вычитания, а задатчик курса выполнен в виде светоотражающей полосы, оптически связанной с датчиками положения.
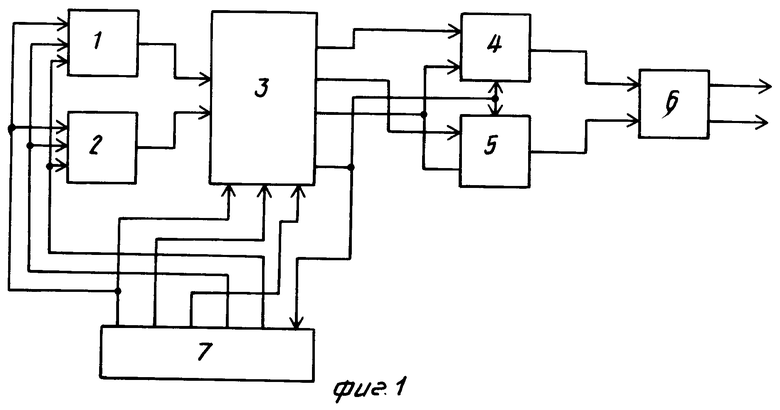
Функциональная схема предложенного устройства приведена на фиг. 1 и содержит блоки 1 и 2 датчиков положения, блок 3 вычитания, блоки 4 и 5 ЦАП, блок 6 коррекции, блок 7 управления, нормально замкнутый контакт.
Первые, вторые и третьи входы блоков 1 и 2 датчиков положения объединены и подключены соответственно к первому, четвертому и пятому выходам блока 7 управления. Выходы блоков 1 и 2 датчиков положения подключены к первому и второму информационным входам блока 3 вычитания. Первый, второй и третий управляющие входы блока 3 вычитания подключены соответственно к первому, второму и третьему выходам блока 7 управления. Первый и второй выходы блока 3 вычитания подключены к информационным входам блоков 4 и 5 ЦАП. Третий выход блока 3 вычитания подключен к объединенным первым управляющим входам блоков 4 и 5 ЦАП. Четвертый выход блока 3 вычитания подключен к первому входу блока 7 управления и к объединенным вторым управляющим входам блоков 4 и 5 ЦАП. Выходы блоков 4 и 5 подключены к первому и второму входам блока 6 коррекции, выходы которых являются выходами устройства для управления положением объекта.
В предлагаемом устройстве устройство коррекции получает управляющие воздействия по двум каналам (в отличие от прототипа). Введение в предлагаемое устройство блока 3 вычитания и блоков 4 и 5 ЦАП позволяет довольно просто определить, на какой из рулевых приводов (правый или левый) следует подавать корректирующий сигнал для требуемого изменения положения объекта относительно светоотражающей полосы. Кроме того, использование управляющей информации в цифровой форме позволяет осуществлять коррекцию положения объекта более точно, чем в случае использования для этих целей информации в аналоговой форме.
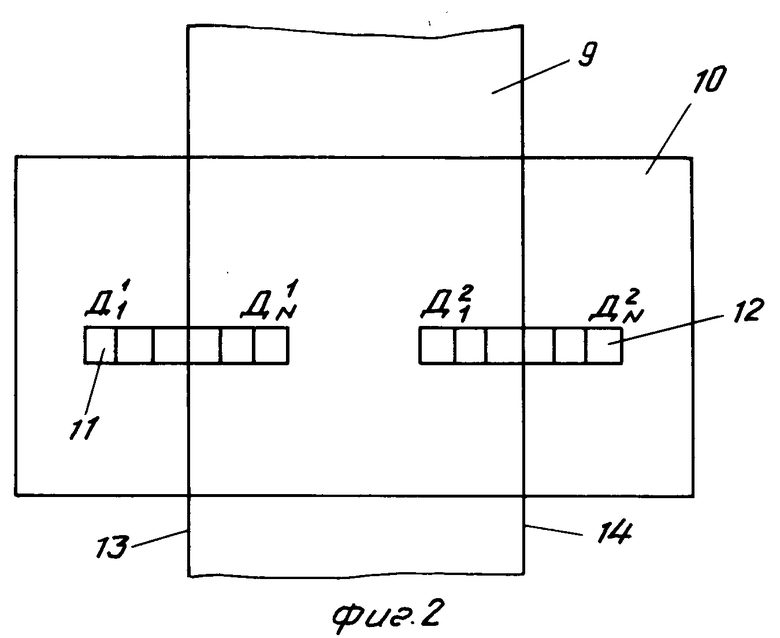
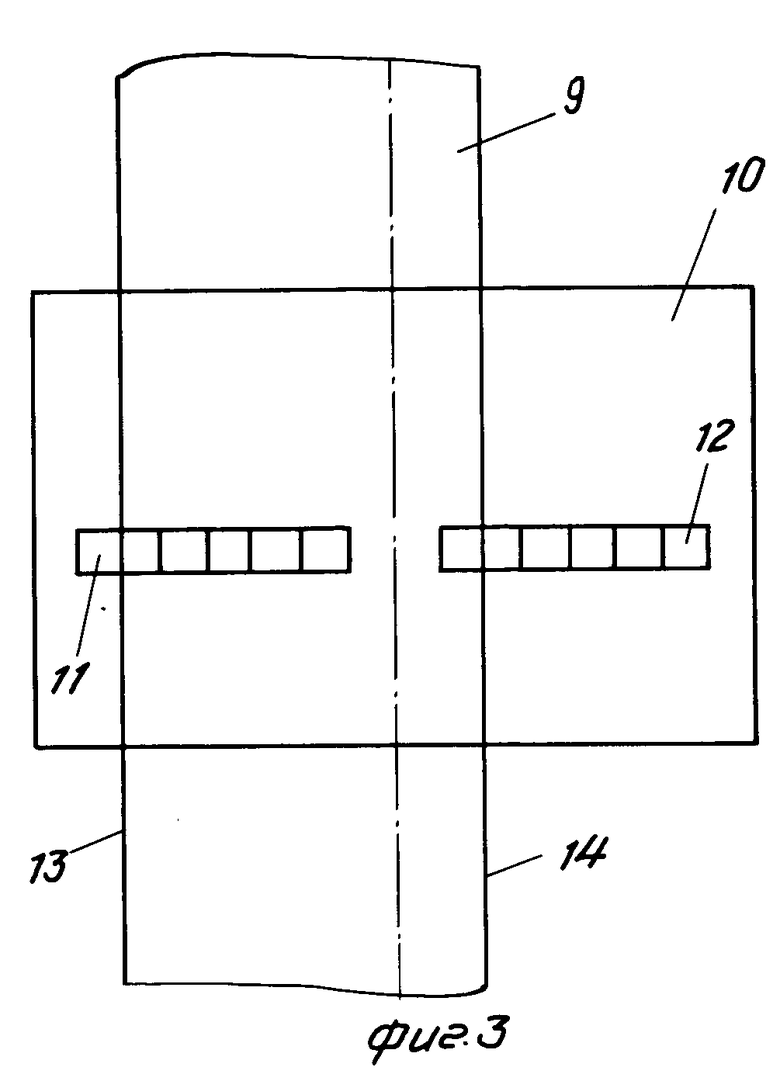
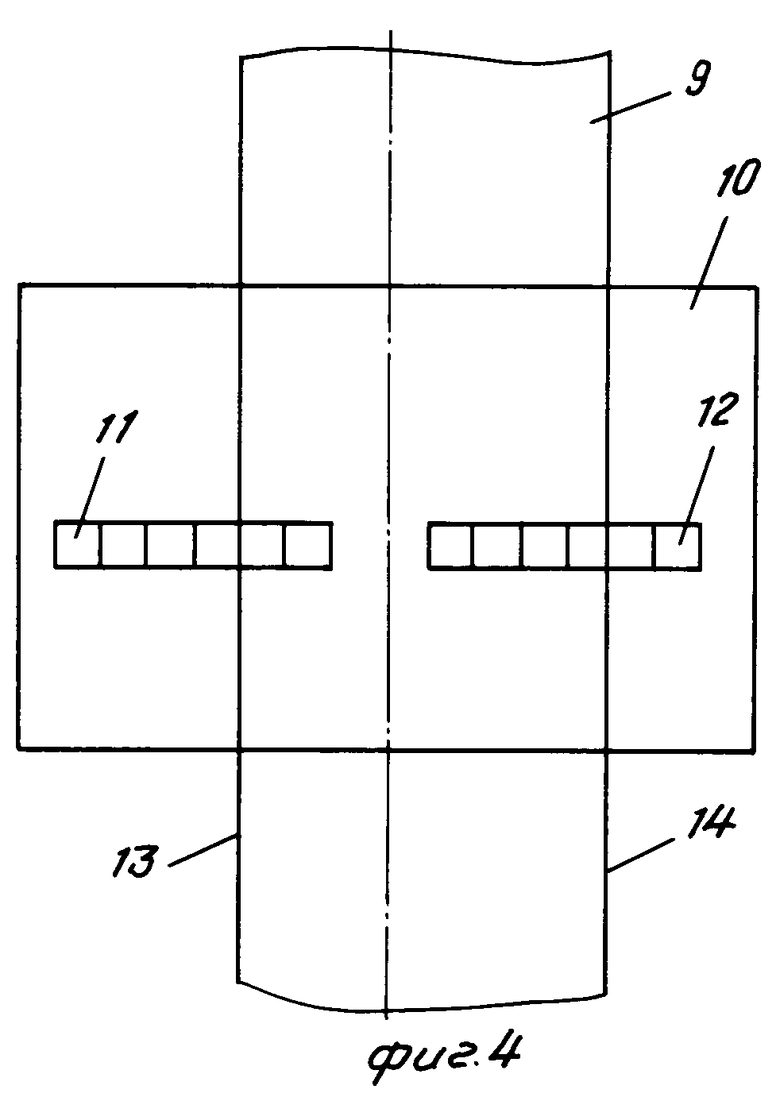
На фиг. 2 показано расположение чувствительных элементов (датчиков положения) в блоках 1 и 2 при движении объекта по заданной траектории (т.е. вдоль светоотражающей полосы); на фиг. 3 и 4 то же, но в случае отклонения объекта от заданного (правильного) курса; на фиг. 5 приведена структурная схема одного из блоков датчиков положения; на фиг. 6 структурная схема блока управления; на фиг. 7 структурная схема блока вычитания.
Блоки 1 и 2 датчиков положения объекта (фиг. 5) идентичны. Каждый из них содержит линейку 15 чувствительных элементов (например, фотодиодов), первый буферный регистр 16, предназначенный для хранения единичного (унитарного) кода, который формируется линейкой чувствительных элементов, шифратор 17, предназначенный для преобразования унитарного кода в двоичный, и второй буферный регистр 18, предназначенный для хранения двоичного кода, сформированного шифратором 17.
Выходы линейки 15 чувствительных элементов подключены к информационным входам первого буферного регистра 16, управляющие входы которого объединены и соединены с первым управляющим входом блока 2 датчиков положения объекта. Выходы первого буферного регистра 16 через шифратор 17 подключены к информационным входам второго буферного регистра 18, управляющие входы которого объединены и соединены с третьим управляющим входом блока 2 датчиков положения объекта. Управляющий вход шифратора 17 соединен с вторым управляющим входом блока 2 датчиков положения объекта.
Линейка чувствительных элементов 15 представляет собой набор чувствительных элементов, например фотодиодов, расположенных как показано на фиг. 2, где 9 светоотражающая полоса-ориентир, 10 объект, 11 и 12 соответственно правый и левый наборы чувствительных элементов, каждый из которых содержит по N чувствительных элементов Д11.ДN1 и Д21.ДN2, 13 и 14 соответственно правая и левая кромки светоотражающей полосы-ориентира.
В исходном состоянии линейки чувствительных элементов расположены симметрично относительно соответствующих кромок светоотражающей полосы. Если чувствительные элементы Д11.ДN1 и Д12 ДN2 представляют собой фотодиоды, а полоса-ориентир является светоотражающей полосой, то при движении объекта точно по заданной трассе (т.е. вдоль полосы-ориентира) в каждой из линеек половина фотодиодов находится в активном состоянии (те из них, которые находятся над полосой-ориентиром и освещаются отраженным от нее светом). Вторая половина фотодиода каждой из линеек при этом находится в пассивном состоянии (они находятся не над полосой, вследствие чего освещаются светом, отраженным не от полосы, а от пола, т.е. значительно слабее, поскольку коэффициент отражения полосы значительно больше коэффициента отражения пола).
На фиг. 2 каждая из линеек содержит по шесть фотодиодов, так что освещенными (активными) в каждой линейке будут три фотодиода. Другими словами, унитарные коды на выходах линеек одинаковы и равны 000111, т.е. трем.
При отклонении положения объекта от полосы-ориентира, например, вправо (фиг. 3) ориентация линеек фотодиодов относительно кромок светоотражающей полосы изменяется, что ведет к изменению соотношения активных и пассивных фотодиодов в каждой из них: в левой линейке в активном состоянии будут уже не три, а четыре фотодиода, в то время, как в правой линейке стало два активных фотодиода (вместо трех). Соответственно разными станут и коды на выходах блоков 1 и 2.
Аналогичная ситуация (неравенство выходных кодов блоков 1 и 2 датчиков положения) имеет место и в случае отклонения положения объекта вправо от полосы (фиг. 4).
Итак, наличие неодинаковых кодов на выходах блоков 1 и 2 датчиков положения свидетельствует об отклонении траектории объекта от светоотражающей полосы. При этом разность выходных кодов блоков 1 и 2 пропорциональна отклонению траектории объекта от полосы-ориентира, а знак этой разности указывает, в какую сторону (вправо или влево) от полосы произошло отклонение. Другими словами по выходным кодам блоков 1 и 2 можно определить, нуждается ли объект в коррекции его траектории и если нуждается, то какой должна быть эта коррекция (по величине и направлению).
Блок 3 вычитания предназначен для формирования сигналов управления рулевыми приводами объекта. Принцип управления рулевыми приводами состоит в подаче на соответствующий (левый или правый) рулевой привод сигнала рассогласования с выхода соответствующего ЦАП.
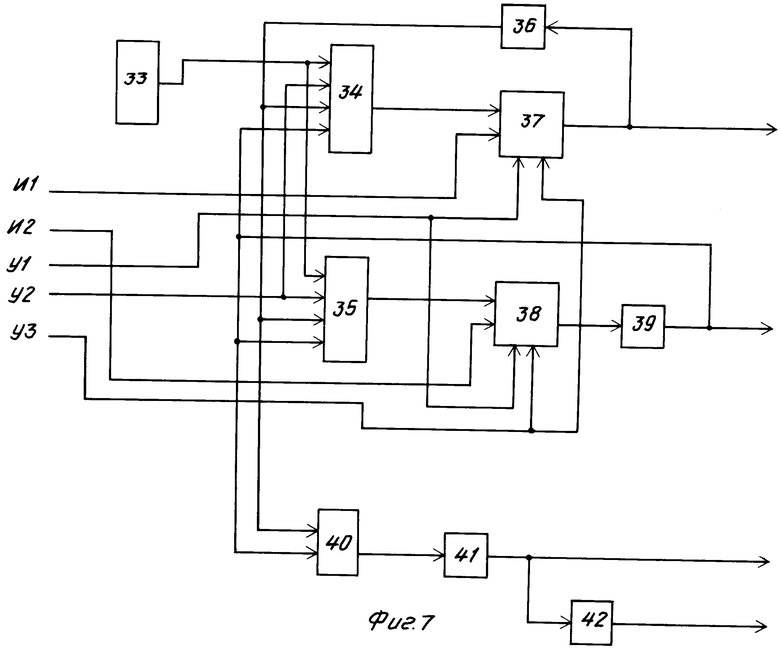
Структурная схема блока 3 вычитания приведена на фиг. 7 и содержит генератор 33 импульсов, схемы И 34, 35 и 40, счетчики 37, 38, дешифраторы 36, 39, формирователь 41, линию 42 задержки.
Выход генератора 33 импульсов подключен к первым входам схем И 34, 35, объединенные третьи входы которых соединены с первым входом схемы И 40 и подключены к выходу дешифратора 36. Вторые входы схем И 34 и 35 объединены и подключены к второму управляющему входу блока 3 вычитания. Объединенные четвертые входы схем И 34, 35 соединены с вторым входом схемы И 40 и подключены к выходу дешифратора 39. Выходы схем И 34 и 35 подключены к вторым информационным входам счетчиков 37 и 38 соответственно, первые информационные входы которых подключены соответственно к первому и второму информационным входам блока 3 вычитания. Первые управляющие входы счетчиков 37 и 38 объединены и подключены к первому управляющему входу блока 3 вычитания. Вторые управляющие входы счетчиков 37 и 38 объединены и подключены к третьему управляющему входу блока 3 вычитания. Выход схемы И 40 подключен к входу формирователя 41, выход которого соединен с третьим выходом блока 3 вычитания. Выход формирователя 41 через линию 42 задержки подключен к четвертому выходу блока 3 вычитания.
Блок 3 вычитания работает следующим образом. Выходные двоичные коды блоков 1 и 2 датчиков положения поступают на первые информационные входы счетчиков 37 и 38 соответственно. По сигналу, поступающему на первый управляющий вход блока 3 вычитания (с первого выхода блока 7 управления), происходит запись выходных кодов блоков 1 и 2 датчиков положения в счетчики 37 и 38 соответственно. По сигналу, поступающему на второй управляющий вход блока 3 вычитания (с второго выхода блока 7 управления), импульсы генератора 33 начинают поступать (через схемы И 34 и 35) на входы "-1" (входы вычитания) счетчиков 37 и 38. Если начальные коды, записанные в счетчиках 37 и 38, равны друг другу, то показания обоих счетчиков, уменьшаясь при поступлении на их входы "-1" импульсов генератора 33, станут равными нулю одновременно, после чего поступление импульсов генератора 33 на упомянутые счетчики прекращается (запрещающие сигналы с выходов дешифраторов 36 и 39 закрывают схемы И 34 и 35 и не позволяют импульсам генератора 33 поступать на счетчики 37 и 38). При этом коды на каждом из выходов блока 3 вычитания равны нулю.
Если коды, зафиксированные в счетчиках 37 и 38, не равны друг другу, то при работе счетчиков в режиме вычитания первым обнуляется тот из них, в котором зафиксирован меньший код. При этом в другом счетчике зафиксирован разностный код, который по соответствующему выходу блока 3 вычитания поступает на "свой" ЦАП. После передачи разностного кода в соответствующий ЦАП на третий управляющий вход блока 3 вычитания (с третьего выхода блока 7 управления) поступает сигнал начальной установки, подготавливающий блок 3 вычитания к очередному циклу работы.
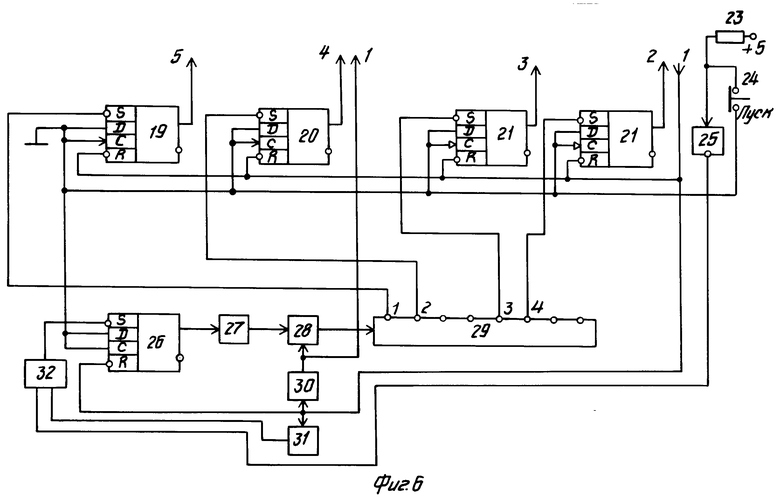
Блок 7 управления обеспечивает функционирование предлагаемого устройства по заданному алгоритму.
Структурная схема блока 7 управления приведена на фиг. 6 и содержит триггеры 19.22, 26, резистор 23, нормально замкнутые контакты 24, инвертор 25, генератор 27 импульсов, выход которого подключен к информационному входу счетчика 28. Выход счетчика 28 подключен к входу дешифратора 29. Первый, второй, третий и четвертый выходы дешифратора 29 подключены к S-входам триггеров 19.22 соответственно. R-входы указанных триггеров объединены и подключены к первому входу блока 7 управления. С- и D-входы упомянутых триггеров объединены с С- и D-входами триггеров 26 и подключены к общей шине устройства. Единичные выходы триггеров 19.22 соединены соответственно с пятым, четвертым, третьим и вторым выходами блока 7 управления. Первый вход блока 7 управления подключен к R-входу триггера 26 и через линию 30 задержки к управляющему входу счетчика 28 и к третьему выходу блока 7 управления, а через линию 31 задержки и схему ИЛИ 32 к S-входу триггера 26. Второй вход блока 7 управления через нормально замкнутый контакт 24 подключен к обшей шине устройства, а через инвертор 25 и схему ИЛИ 32 к S-входу триггера 26.
Блок 7 управления работает следующим образом. При нажатии кнопки "Пуск" триггер 26 устанавливается в "1", при этом запускается генератор 27 импульсов и его импульсы начинают подсчитываться счетчиком 28. На выходах дешифратора 29, подключенного к выходу счетчика 28, последовательно появляются управляющие сигналы. Сигнал с первого выхода дешифратора 29 устанавливает в "1" триггер 19. Сигнал с второго выхода дешифратора 29 устанавливает в "1" триггер 20, сигнал с третьего выхода дешифратора 29 устанавливает в "1" триггер 21, а сигнал с четвертого выхода дешифратора 29 устанавливает в "1" триггер 22. Импульс готовности разностного кода, поступающий с четвертого выхода блока 3 вычитания на первый вход блока 7 управления, осуществляет такие операции: устанавливает в "0" триггеры 19.22 и 26, устанавливает в "0" счетчик 28 (через линию 30 задержки) и все остальные блоки устройства (по третьему выходу блока 7 управления), через линию 31 задержки и схему ИЛИ 32 устанавливает в "1" триггер 19, после чего начинается новый цикл работы блока 7 управления.
Предлагаемое устройство работает следующим образом.
Выходные сигналы блоков 1 и 2 датчиков положения поступают на информационные входы блока 3 вычитания. По сигналу с второго выхода блока 7 управления осуществляется запись двоичных кодов состояний чувствительных элементов блоков 1 и 2 в соответствующие счетчики блока 3 вычитания. В итоге на одном из выходов блоков 4 и 5 ЦАП всегда нулевой сигнал, а на другом сигнал, пропорциональный разности выходных кодов блоков 1 и 2.
Выходные сигналы ЦАП 4 и 5 через блок 6 коррекции воздействуют на блоки управления правым и левым рулевыми приводами объекта и таким образом обеспечивают движение последнего по заданной траектории.
Коррекция траектории движения объекта осуществляется выравниванием угловых скоростей (за счет увеличения скорости вращения соответствующего рулевого привода в блок управления соответствующего рулевого привода поступает сигнал с выхода "своего" ЦАП и увеличивает его скорость до тех пор, пока сигнал рассогласования не уменьшится до нуля).
Перемещение объекта по заданной траектории (когда отклонение его действительной траектории от заданной не превышает допустимого) происходит в случае, когда угловые скорости левого и правого рулевых приводов одинаковы. В таком случае коды состояний чувствительных элементов в блоках 1 и 2 датчиков положения объекта, зафиксированные в соответствующих счетчиках (34 и 35) блока 3 вычитания, одинаковые. Следовательно, выходные сигналы ЦАП 4 и 5 равны нулю, как и выходные сигналы блока 6 коррекции объект продолжает движение по прежней (правильной) траектории.
При отклонении траектории движения объекта от заданной, например, влево предлагаемое устройство вырабатывает сигнал, который, поступая в блок управления левого привода, увеличивает его скорость вращения до тех пор, пока объект не вернется на заданную траекторию. Осуществляется это следующим образом. Коды состояний датчиков положения в блоках 1 и 2, зафиксированные в счетчиках 34 и 35 блока 3 вычитания, не равны друг другу код в счетчике 35 больше или меньше кода в счетчике 34 (в зависимости от того, в какую сторону (вправо или влево) от полосы-ориентира отклоняется объект). В итоге на выходе одного из ЦАП (4 или 5) нулевой сигнал, в то время как на другом ЦАП (на его выходе) сигнал, пропорциональный разности кодов, зафиксированных в счетчиках 34 и 35 блока 3 вычитания (а значит, и пропорциональный разности угловых скоростей вращения правого и левого рулевых приводов объекта).
В итоге на рулевой привод, который "отстает" (т.е. имеет меньшую угловую скорость вращения) подан управляющий сигнал с выхода "своего" ЦАП, в результате чего объект перемещается на заданную траекторию.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНАЯ СИСТЕМА ДЛЯ РЕГИСТРАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 1991 |
|
RU2037190C1 |
| МНОГОКАНАЛЬНЫЙ КОММУТАТОР | 1991 |
|
RU2026605C1 |
| СПОСОБ ЦИФРОВОГО ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2025044C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2046396C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2046395C1 |
| ЦИФРОАНАЛОГОВАЯ СИСТЕМА ДЛЯ РЕГИСТРАЦИИ И ОБРАБОТКИ ИНФОРМАЦИИ | 1991 |
|
RU2022364C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2049347C1 |
| УСТРОЙСТВО МИКРОПРОГРАММНОГО УПРАВЛЕНИЯ | 1991 |
|
RU2042188C1 |
| МИКРОПРОГРАММНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2042189C1 |
| УСТРОЙСТВО МИКРОПРОГРАММНОГО УПРАВЛЕНИЯ | 1991 |
|
RU2042190C1 |

Изобретение относится к системам автоматического управления положением объекта, который перемещается по заданной трассе-ориентиру, и может быть использовано для управления внутрицеховым робокаром в гибком автоматизированном производстве. Целью изобретения является повышение точности слежения за положением объекта. Цель достигается тем, что в устройство для управления положением объекта, содержащее задатчик курса, размещенный на трассе движения, два датчика положения и блок коррекции, введены первый и второй цифроаналоговые преобразователи, блок управления и блок вычитания, а задатчик курса выполнен в виде светоотражающей полосы, оптически связанной с датчиками положения. 3 з.п. ф-лы, 7 ил.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для управления подвижным объектом | 1986 |
|
SU1411713A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
