1
Изобретение относится к автоматике, а именно к устройствам программного управления, использующим информацию в унитарном импульсном коде.
По основному авт. св. № 760030 известно устройство для программного управления содержащее источник импульсов унитарного кода, соединенный с двухкаскадными импульсно-фазовым преобразователем, выходы которого подсоединены к фазовому датчику обратной связи, кинематически связанному с приводом, и к фазовому дискриминатору, причем входы последнего подключены к входам блока сравнения,последовательно с которым соединены реверсивный счетчик, цифро-аналоговый преобразователь и сумматор, второй вход которого соединен с выходом фазового дискриминатора, выход -с приводом, а выход блока сравнения соединен также с дополнительными входами рабочего делителя частоты второго импульсно-фазового Преобразователя.
Известное устройство обладает высокой надежностью, что достигнуто путем расширения диапазона рассогласования следящей системы.
Однако в известном устройстве частота входного сигнала привода .не превышает частоту запитки датчи,д ка обратной связи, что затрудняет сглаживание пульсаций выходного сигнала фазового дискриминатора и в конечном итоге снижает динамическую точность работы устройства. 5 Цель изобретения - повышение динамической точности устройства.
Поставленная цель достигается тем, что в устройство введены элемент ИЛИ и распределитель импульсов, 20 первый выход которого подключен
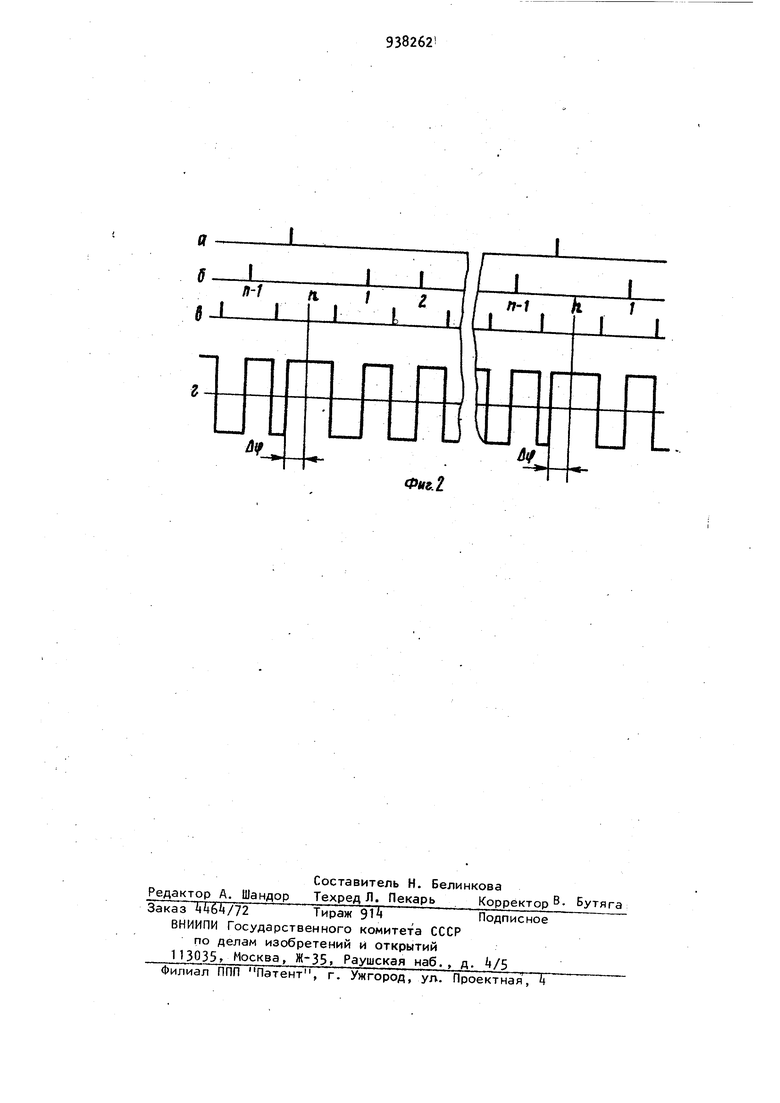
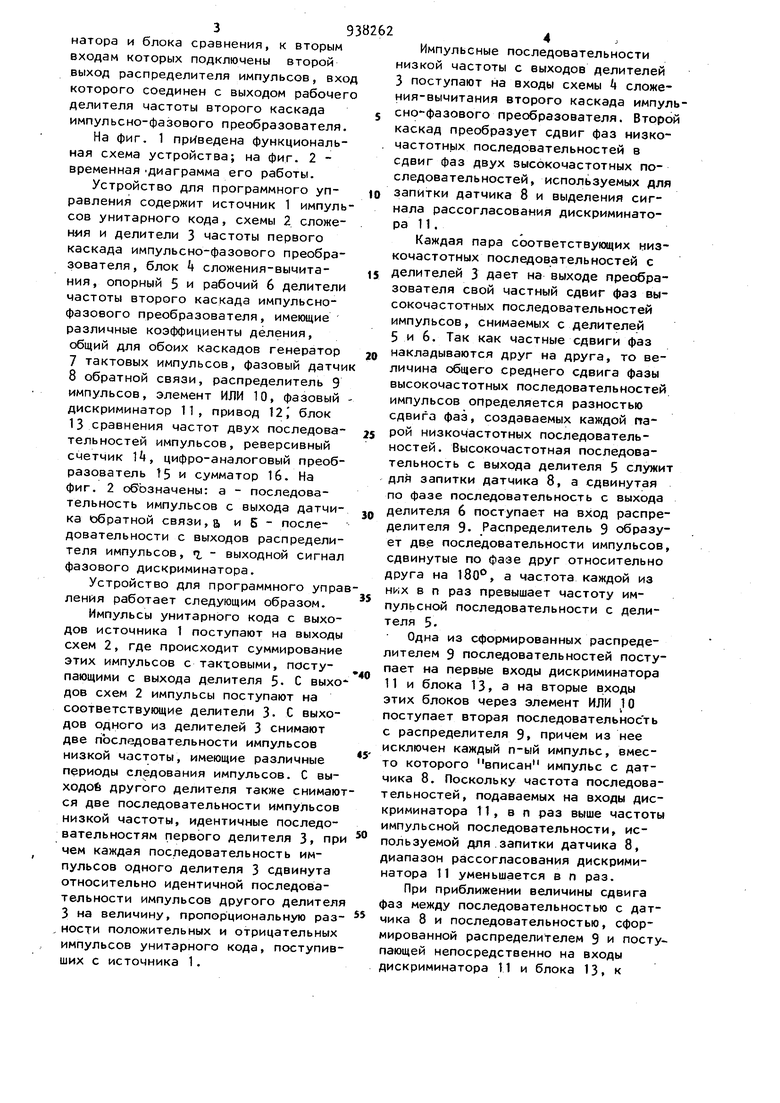
к одному входу элемента ИЛИ, второй вход которого соединен с выходом датчика обратной связи, а выход с первыми входами фазового дискрими 39 натора и блока сравнения, к вторым входам которых подключены второй выход распределителя импульсов, вход которого соединен с выходом рабочего делителя частоты второго каскада импульсно-фазового преобразователя. На фиг. 1 приведена функциональная схема устройства; на фиг. 2 временная диаграмма его работы. Устройство для программного управления содержит источник 1 импульсов унитарного кода, схемы 2 сложен 1Я и делители 3 частоты первого каскада импульсно-фазового преобразователя, блок k сложения-вычитания, опорный 5 и рабочий 6 делители частоты второго каскада импульснофазового преобразователя, имеющие различные коэффициенты деления, общий для обоих каскадов генератор 7тактовых импульсов, фазовый датчи 8обратной связи, распределитель 9 импульсов, элемент ИЛИ 10, фазовый дискриминатор П, привод 12, блок 13 сравнения частот двух последовательностей импульсов, реверсивный счетчик 1, цифро-аналоговый преобразователь 15 и сумматор 16. На фиг. 2 обозначены: а - последовательность импульсов с выхода датчика обратной связи, в и Б - последовательности с выходов распределителя импульсов, 7, выходной сигнал фазового дискриминатора. Устройство для программного упра ления работает следующим образом. Импульсы унитарного кода с выходов источника 1 поступают на выходы схем 2, где происходит суммирование этих импульсов с тактовыми, поступающими с выхода делителя 5- С выхо дов схем 2 импульсы поступают на соответствующие делители 3. С выходов одного из делителей 3 снимают две последовательности импульсов низкой частоты, имеющие различные периоды следования импульсов. С выходоб другого делителя также снимаю ся две последовательности импульсов низкой частоты, идентичные последовательностям первого делителя 3, пр чем каждая последовательность импульсов одного делителя 3 сдвинута относительно идентичной последовательности импульсов другого делител 3 на величину, пропорциональную раз , ности положительных и отрицательных импульсов унитарного кода, поступив ших с источника 1. Импульсные последовательности низкой частоты с выходов делителей 3 поступают на входы схемы сложения-вычитания второго каскада импульсно-фазового преобразователя. Второй каскад преобразует сдвиг фаз низкочастотных последовательностей в сдвиг фаз двух высокочастотных последовательностей, используемых для запитки датчика 8 и выделения сигнала рассогласования дискриминатора 11. Каждая пара соответствующих низкочастотных последовательностей с делителей 3 дает на выходе преобразователя свой частный сдвиг фаз высокочастотных последовательностей импульсов, снимаемых с делителей 5 и 6. Так как частные сдвиги фаз накладываются друг на друга, то величина общего среднего сдвига фазы высокочастотных последовательностей импульсов определяется разностью сдвига фаз, создаваемых каждой парой низкочастотных последовательностей. Высокочастотная последовательность с выхода делителя 5 служит для запитки датчика 8, а сдвинутая по фазе последовательность с выхода делителя 6 поступает на вход распределителя 9- Распределитель 9 образует две последовательности импульсов, сдвинутые по фазе друг относительно друга на 180°, а частота каждой из них в п раз превышает частоту импульсной последовательности с делителя 5Одна из сформированных распределителем Э последовательностей поступает на первые входы дискриминатора 11 и блока 13, а на вторые входы этих блоков через элемент ИЛИ ,10 поступает вторая последовательность с распределителя 9. причем из нее исключен каждый п-ый импульс, вместо которого вписан импульс с датчика 8. Поскольку частота последовательностей, подаваемых на входы дискриминатора 11, в п раз выше частоты импульсной последовательности, используемой для запитки датчика 8, диапазон рассогласования дискриминатора 11 уменьшается в п раз. При приближении величины сдвига фаз между последовательностью с датчика 8 и последовательностью, сформированной распределителем 9 и поступающей непосредственно на входы дискриминатора 11 и блока 13, к
предельному значению в п раз уменьшенного диапазона работы дискрими- натора 11 на одном из выходов + или - блока 13 появляется импульс, который поступает на счетчик 14 и дополнительные входы делителя 6. Импульс с положительного выхода блока 13 производит отрицательный сдвиг фазы выходного импульса делителя 6. Импульс с отрицательного выхода блока 13 производит положительный сдвиг фазы выходного импульса делителя 6. Одновременно с этим производится замена этого сдвига постоянной составляющей при помощи счетчика Н и преобразователя 15 что эквивалентно расширению диапазона работы дискриминатора 11.
Таким образом, предлагаемое устройство для программного управления при.высокой надежности работы обладает высокой динамической точностью. Это достигается тем,, что на фазовой дискриминатор поступают импульсы с частотой в п раз выше, чем частота запитки датчика обратной связи и каждое рассогласование фазового дискриминатора, равное 360°/п заменяется на постоянную составляющую. Выделенная постоянная составляющая, ис пользуемая для управления приводом, получается более близкой к идеальной, что повышает динамическую точ- ность.
Формула изобретения
Устройство для программного управления по авт. св. Vf 760030, отличающееся тем, что, с целью повышения динамической точности устройства, в него введены элемент ИЛИ и распределитель импульсов, первый выход которого подключен к одному входу элемента ИЛИ, второй вход которого соединен с выходсж датчика обратной связи, а выход - с первыми входами фазового дискриминатора и блока сравнения, к вторым входам которых подключен второй выход распределителя импульсов , вход которого соединен с выходом рабочего делителя частоты второго каскада импульсно- фазвого преобразователя.
Фие.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1980 |
|
SU903811A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1969 |
|
SU253542A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1973 |
|
SU378806A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1972 |
|
SU434381A1 |
| Устройство для программного управления | 1973 |
|
SU489083A1 |
| ИМПУЛЬСНО-ФАЗОВОЕ УСТРОЙСТВО ДЛЯ ПРОГРАММНОГОУПРАВЛЕНИЯ | 1969 |
|
SU238647A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| ВПТБсозд | 1973 |
|
SU408278A1 |
| Стабилизированный электропривод постоянного тока | 1986 |
|
SU1359879A1 |
| Цифровая следящая система | 1980 |
|
SU962845A1 |