Изобретение относится к электро технике, а именно к управлению элек тродвигателями переменного тока, пре Имущественно с низкой частотой вра щения.
Целью изобретения является повыше ние стабильности мгновенной частоты вращения.
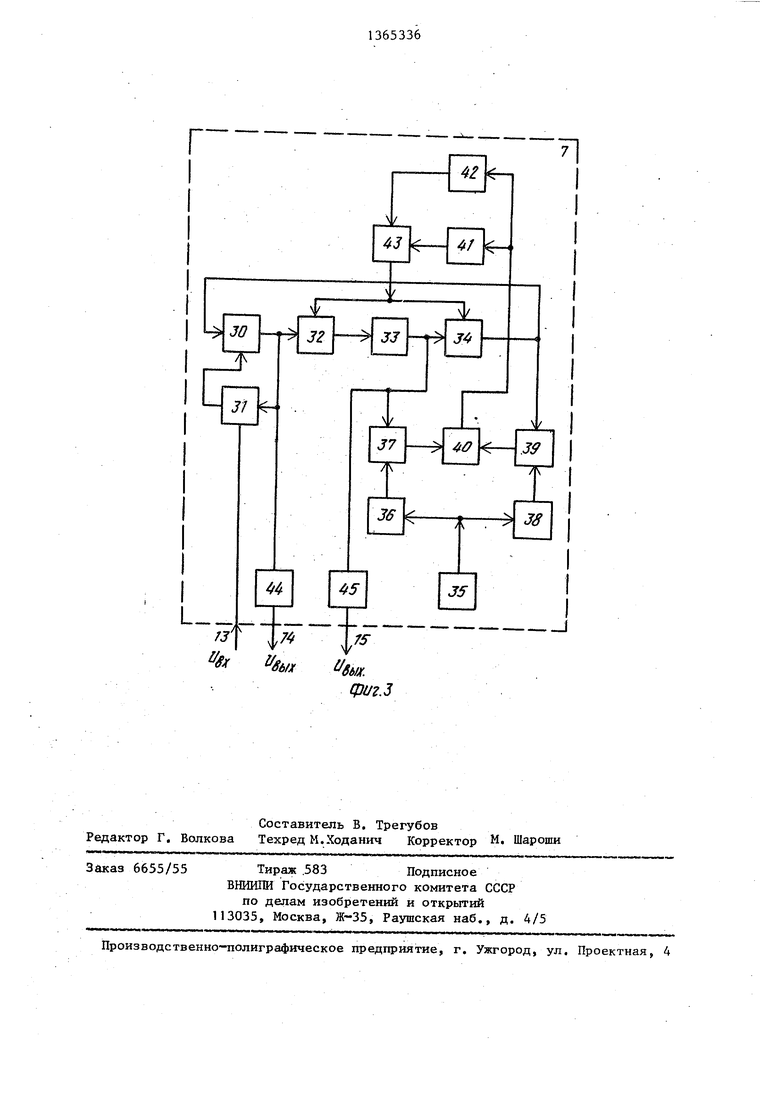
На фиг. 1 изображена структурная схема электропривода; на фиг 2 принципиальная схема блока эталонной динамической модели; на фиг. 3 структурная схема формирователя уп- равляклцих сигналов для двигателя.с двумя обмотками управления.
Электропривод содержит, например,, синхронный индукторньй двигатель 1 (фиг. 1) с двумя обмотками 2 управ ления и обмоткой 3 возбуждения и без обмоточным ротором 4 Обмотка 3 воз- буждения подключена к источнику постоянного тока (не показан). Электропривод содержит блок 5 эталонной ди намической модели, вход 6 и выход 7 которого соединен соответственно с выходом 8 и вторым входом 9 сумматора 10, причем первый вход 11 сум матора 10 я.вляется входом задающего напряжения от внешнего источника (не показан), а такАе формирователь 12 управляющих сигналов, вход 13 кото-- рого соединен с выходом 8 сумматора 10, а выходы 14 и 15 соединены соот- ветственно с обмотками 2 .управления.
Блок 5 эталонной динамической модели (фиг. 2) содержит суммирующий усилитель 16, первый усилитель 17, второй усилитель 18, К инвертирующе™ му входу суммирующего усилителя 16 подключены подстроечные резисторы 19 и 20 и резистор 21, а выход суммир у ющего усилителя 16 подключен через параллельно соединенные конденсатор 22 и подстроечный резистор 19 с его инвертирующим входом и через резис тор 23 с инвертирующим входом первого усилителя 17, Выход первого уси- лителя 17 соединен через емкость 24 с его инвертирующим входом и через резистор 25 с инвертирующим входом второго усилителя 18, Выход инверто- ра 18 соединен через резистор 26 с его инвертирующим входом и через под строечный резистор 20 с инвертирующи входом суммирующего усилителя 16, Неинвертирующие входы суммирующего усилителя 16, первого усилителя 17 и второго усилителя 18 соединены соот
0
0
25
30
55
ветственно через резисторы с шиной нулевого потенциала. Причем вход 6 блрка 5 эталонной динамичес кой моцеЛи соединен с инвертирующим входом с уммирующего усилителя 16 через резибтор 21, а его выход 7 сое динен с выходом суммирующего усили Теля 16с Формирователь 12 управляющих сигналов (фиг. 3) содержит последовательно соединенные первый ин тегратор 30, в обратной связи которого включен блок 31 авторегулирования амплитуды, первый блок 32 умно- 15 жения, второй интегратор 33, второй блок 34 умножения, а также задающий источник 35 прямоугольных сигналов, первый формирователь 36 импульсов, первую схему 37 выборки-хранения, формирователь 38 кмпульсов, вторую схему 39 выборки-хранения, первый суммирующий элемент 40, При этом вьг, ход задающего источника 35 прямо-) угольных сигналов через первьй 36 и второй 38 формирователи импульсов подключен к управляющим входам первой 37 и второй 39 схем выборки-хранения соответственно, другие входы которых соединены с выходом второго интегратора 33 и второго блока 34 умножения, й 1ходы первой 37. и второй схемы 39 выборки-хранения соединены с выходами первого суммирующего элемента 40, выход которого соединен с входами третьего интегратора 41 и звена 42 с постоянным коэффициентом переда чио Выходы блоков 41 и 42 соединены с Входами второго суммирующего элемента 43, выход которого соединен с уп- равлякщими входами первого 32 и второго 34 блоков умножения. Выходы первого 30 и второго 33 интеграторов соединены соответственно, с входами усилителей 44 и 45, выходы 14 и 15 которых являются выходами формирователя 12 управляющих сигналов, вход 13 которого соединен с вторым входом блока 31 регулирования амплитуды.
Устройство работает следующим образом.
Задающий сигнал от внешнего источника постоянного тока подается на первый вход 11 сумматора 10 и с его выхода 8 через формирователь 12 уп- равлякнцих сигналов на. управляющие . обмотки 2 синхронного индукторного двигателя 1. На обмотку 3 возбуждения для создания рабочего магнитного потока подается постоянное напряже-
35
40
45
50
ние возбуждения. Сигнал с выхода 8 сумматора 10 поступает в блок 5 эталонной динамической модели, моделирующий передаточную функцию двигателя 1 и формирователя 12 управляющих сигналов. На выходе блока 5. вырабатывается сигнал, пропорциональный первой производной от угла поворота ротора 4 двигателя 1. Таким образом, выходной сигнал сумматора 10 Uj-, образованный разностью задающего сигнала Uj и выходного сигнала блока 5 модели и
Т
и
Зад
- и.
поступает на вход формирователя 12 управляклцих сигналов. Формирователь 12 преобразовывает постоянный сигнал в сигналы, качественные по гармониче кому составу, сдвинутые друг относительно друга по фазе (для двухфазной системы обмоток управления этот угол равен 7J/2). Одновременно исключается причина колебаний частоты вращения ротора 4, вызванная несинусоидальностью напряжения питания обмоток 2 управления двигателя 1, Частота вы- ходных напряжений формирователя 12 изменяется пропорционально выходному сигналу сумматора 10. При изменении (например, увеличении) , изменяется (увеличивается) сигнал на выход сумматора 10 U, изменяя (увеличивая на выходе формирователя 12 частоту питания обмоток 2 управления двигателя 1, тем самым изменяя (увеличивая) частоту вращения поля машины. Частота вращения ротора 4 синхронного двигателя 1 должна совпадать со скоростью вращения поля и, следовательно, она будет стремиться к скорости вращения поля, т.е. в данном случае увеличивается. Поскольку на- пряжение U одновременно подается через формирователь 12 на управляющи обмотки 2 двигателя и иа вход блока 5 эталонной динамической модели, то выходной сигнал U блока 5 будет пропорционален первой производной угла поворота ротора (т.е. частоте вращения ротора), и следовательно, при изменении задающего напряжения выходной сигнал блока 5 U изменяет ся (увеличивается) И) вычитаясь в сумматоре 10 из задающего сигнала и, , изменяет (уменьшает) выходное напряжение сумматора 10. Соответст-
ю
653364
венно изменяется (уменьшается) частота выходного напряжения формирователя 12 управляющих сигналов, изменяя (уменьшая) частоту вращения поля, следовательно, частота вращения ротора 4 изменяется (уменьшается) до первоначального значения, так как быстродействие данной системы определяется только быстродействием цифровых и аналоговых элементов, входящих в ее состав, то происходит непрерывное демпфирование колебаний частоты вращения ротора 4. Блок 5 динамической модели реализует передаточную функцию двигателя с формирователем 7. В зависимости от области применения синхронных ин,цукторных двигателей передаточная функция этик машин может быть представлена с различной степенью точности. Например, для прецизионных приводов необходимо учитьшать полную передаточную функцию двигателя 1 и формирователя 12 управлякмцих сигналов. Для работы в силовом приводе достаточно описать двигатель, например, колебательным звеном второго порядка, принципиальная схема которого представлена на
2, а передаточная функция имеет
15
20
25
30
фиг.
вид
0
5
VP) v
к
+ 2 ТР+ 1
0
где Ко коэффициент усиления двигателя;Т - электромеханическая постоян
ная времени;
- коэффициент демпфирования. Также для повышения точности блока 5 динамической модели необходимо учитывать передаточную функцию формирователя 12 управлякщих сигналов. В связи с тем, что постоянная времени формирователя 12, по сравнению с постоянной времени двигателя 1 мала, то формирователь 12 управляющих сигналов можно ввести в блок 5 как безынерционное звено с коэффициентом усиления К ф,с i В этом случае передаточная функция блока 5 динамической модели принимает вид
5
Ш К Kt
К
+ 2 Тр + I
где К К,- К ,е
Принципиальная схема блока 5 (фиг. 2) реализует следующее уравнение:
.
iL.u и
ip2 rp M rpi
(1)
Для получения первой производной по углу поворота ротора 4 необходимо проинтегрировать данное уравнение t
и
к „
гр 1 М
2l
Т
и.
.
Интегрирование осуществляется мирующим усилителем (интегратором) 16. Коэффициенты этого уравнения К/т , 2f /Т, 1/Т определяют номиналы емкости С у конденсатора 22 и резисторов (R.,5 R, R 3) Причем резисторы 19 и 21 (R,, , Rj являются подстроеч - ными, что позволяет регулировать козф фициент демпфирования и злектромеха ническую постоянную времени блока 5 модели двигателя 1, Таким образом, блок 5 модели может быть подстроен под любое изменение параметров двига теля 1. В блок 5 эталонной динамичес кой модели введены первый усилитель (интегратор) 17 для вьщеления сигнала соответствующего углу поворота ротора 4 и второй усилитель (инвертор) 18, изменяющий знак этого сигнала для схемной реализации уравнения (1). Коэффициенты усиления усилителя 17 и 18 о пределяются соответственно эле- ментами 23 (R), 24 (С 5) и 25 (R),
26(Rg). Для повьшения точности- ра боты суммирующего усилителя 17 и ycH лителя 18 к их неинвертирующим входам подключены соответственно резисторы
27(R4), 28 (Rj, 29JR8). ,
Формирователь 12 осуществляет пре- образование следующим образом.
Генератор, управляемый напряжени ем, состоящий из первого интегратора 30, первого блока 32 умножения, вто- рого интегратора 33, второго блока 34 умножения, блока 31 авторегулиро- вания амплитуды, генерирует напряжение частотой
w, и, ,
где К„ - коэффициент усиления контура генератора;
- выходной сигнал суммирующего элемента.
Стабилизация фазы выходных сигна лов осуществляется системой автоподстройки фазы, содержащей первую 37 и вторую 39 схемы выборки-хранения.
первьй 36 и -второй 38 формирователи импульсов, первый суммирующий элемент 40 третий интегратор 41, звено 42 с
постоянными коэффициентами передачи, второй с;уммирующий элемент 43. Импульсы задающего источника прямоуголь - ных сигналов частотой ы и скважностью 0,5 поступают на входы первого 36 и второго 38 формирователей импульсов, где формируются короткие импульсы записи соответственно по их переднему и заднему фронту, которые поступают на управляющие входы
первой 37 и второй 39 схем выборки- хранения. На информационные входы схем выборки-хранения поступают сигналы с выхода второго интегратора 33 и второго инвертирзгющего блока 34 умножения. При равенстве частот генератора 35 опорной частоты и формирователя двухфазных напряжений вплоть до нулевых фазовых рассогласований на выходах первой 37 и второй 39 схем
выборки-хранения будет присутствовать нулевой потенциал, которьй, поступая на выходы третьего интегратора 41 и звена 42 постоянного коэффициента передачи с выхода первого суммирующе-
го элемента 40, не изменяет напряжения на выходе второго суммирующего элемента 43, а следовательно, частота и фаза выходных синусоидальных напряжений остаётся прежней.
При изменении частоты и фазы вы- ходных сигналов формирователя 12 вследствие каких-либо причин (температурный дрейф, старение элементов и ТсД„) в схемы выборки-хранения 38
и 9 выбираются соответственно потенциалы, пропорциональные синусу угла сдвига фаз выходного сигнала второго интегратора 33 относительно переднего фронта импульса источника 35 опор. ной частоть и сигнала с выхода второго инвертирующего блока 34 умножения относительно заднего фронта импульса генератора 35. опорной частоты. Выходные сигналы схем выборки-хранения поступают на входы первого суммирующего элемента 40 и складываются. Выходной сигнал с выхода первого суммирующего элемента 40 поступает на входы третьего интегратора 41 и зве-
на 42 с постоянным коэффициентом передачи, выходные сигналы которых изменяют потенциал на выходе второго суммирующего элемента 43 так, чтобы скомпенсировать изменение частоты
и фазы выходных сигналов формирователя 12 управляющих сигналов. С выходов первого 30 и второго 33 интеграторов синусоидальные сигналы, сдвинутые по фазе (в случае двухфазной системы обмоток угол сдвига составляет ft/2, поступают на входы усилите- лей 44 и 45, где усиливаются .до нузк- ноге уровня для подачи на обмотки 2 управления двигателя 1,
Таким образом, применение формирователя 12 управлянщих сигналов в совокупности с блоком 5 модели позволя- ет демпфировать колебания мгновенной частоты вращения ротора двигателя, которые возникают за счет несинусо- идальности напряжения питания обмоток управления двигателя.
Формула изобретения
1. Электропривод, содержащий электродвигатель переменного тока с управлякяцими обмотками, подключенны- ми к;выходу формирователя управлянлцих сигналов, соединенного последователь- но с сумматором, блок эталонной динамической модели двигателя, соеди- ненный своим одним входом с источни- ,ком задающего напряжения, отли0
5
0
5 0
чающийся тем, что, с целью повышения стабильности мгновенной частоты вращения, блок эталонной динамической модели снабжен контуром отрицательной обратной связи по скорости, выход которой соединен с вторым входом сумматора, а вход указанной модели соединен с выходом сумматора..
2. Электропривод по п, 1, отличающийся тем, что блок эталонной динамической .модели содержит последовательно соединенные по инвертирующим входам через резисторы связи .суммирующий усилитель, первый усилитель с первым конденсатором в цепи обратной связи ,причем их неинвертирующие входы через соответствующие резисторы подключены к шине нулевого потенциала, а к инвертирующему входу суммирующего усилителя подключены резистор, вторая клемма которого соединена с клеммой входа модели, а выход второго усилителя через первый подстроечный резистор, выход суммирующего усилителя через параллельно соединенные второй конденсатор и второй подстроечный резистор связаны с клеммой его инвертирующего входа, которая соединена с клеммой выхода модели.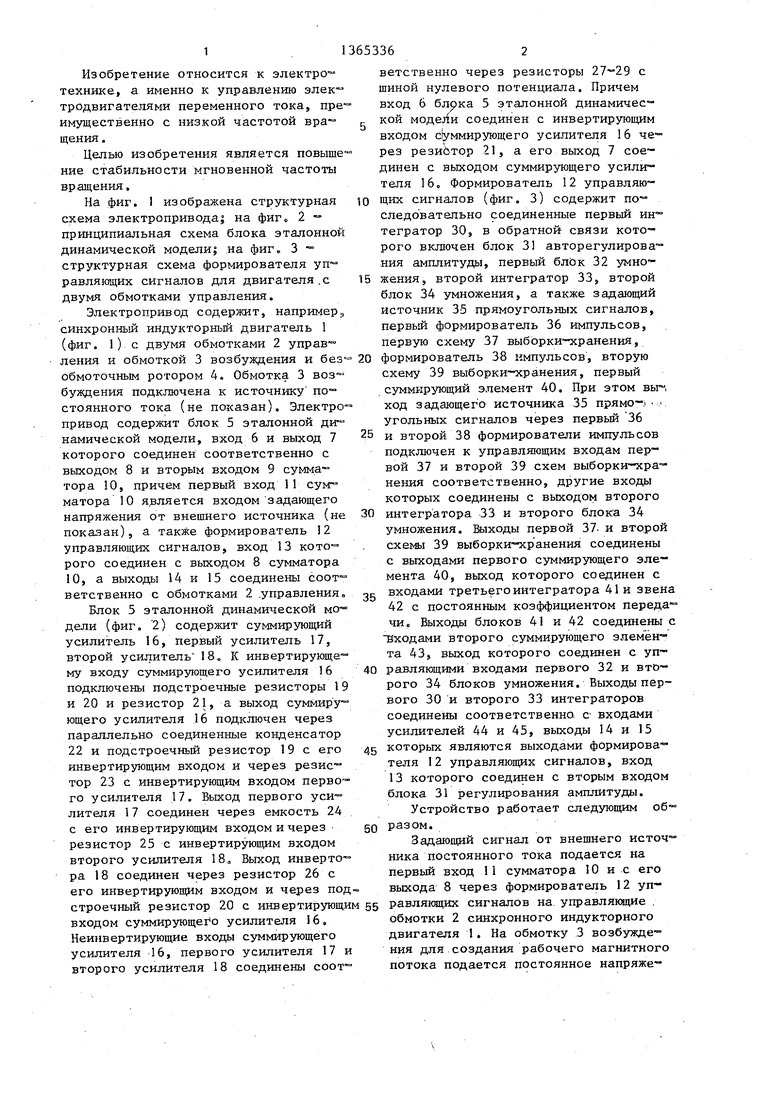
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1989 |
|
SU1681315A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Устройство для определения статического момента двигателя | 1991 |
|
SU1789887A1 |
| Электропривод | 2019 |
|
RU2713185C1 |
| ЭЛЕКТРОПРИВОД | 1995 |
|
RU2087068C1 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |
Изобретение относится к электротехнике и используется в синхронных электродвигателях с электромагнитной редукцией частоты вращения, в системах автоматики с повышенными требованиями к равномерности вращения ротора. Цель изобретения состоит в по- вьппении стабильности мгновенной частоты вращения. Синхронный индукторный двигатель 1 содержит статор с обмотками 2 управления и обмоткой 3 возбуждения и безобмоточный ротор 4. В цепи управления имеются последовательно соединенные сумматор 10 и формирователь 12 управляющих сигналов, выходы которого соединены соответственно с обмотками управления двигателя, и блок 5 динамической модели, вход и выход которого соединены соответственно с выходом и первым входом сумматора, причем второй вход сумматора служит входом задающего сигнала двигателя. Постоянное демпфирование мгновенной частоты вращения ротора возникает за счет быстродействукнцей обратной связи по задающему воздействию, которую осуществляет блок динамической модели. Г з.п. ф-лы, 3 ил. tfiof i (Л С со О) Сл СО со а
I
СЙУ/.f
.
/У
t
75
f SbfX .
фиг.З
75
| Синхронный редукторный электродвигатель | 1981 |
|
SU963125A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для формирования двухфазных напряжений | 1982 |
|
SU1095097A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Башарин А | |||
| В | |||
| и др | |||
| Управление электроприводами | |||
| - Л.: Энергия, 1982, с | |||
| АВТОМАТ ДЛЯ ПУСКА В ХОД ПОРШНЕВОЙ МАШИНЫ | 1920 |
|
SU299A1 |
