Изобретение относится к автоматическому управлению, а именно к электрическим устройствам с внутренней обратной связью, и может быть применено для регулирования объектов, требующих повышен- ного быстродействия и минимального перерегулирования (например, в системах автоматической подстройки частоты магнетрона).
Известна следящая система, содержа- щая первый элемент сравнения, усилитель, сумматор, двигатель с редуктором, датчик обратной связи, второй элемент сравнения и корректирующую цепь, состоящую из та- хогенератора, апериодического звена, третьего элемента сравнения, усилителя, ключа схемы неравнозначности.
Недостатком этой системы являются низкие динамические характеристики, вызванные тем, что корректирующий сигнал вводится только в режиме слежения для компенсации сухого трения, а во время колебательных процессов исключается.
Известна также следящая система, содержащая элемент сравнения, первый сум- матор, регулятор Л/2, объект регулирования Wi, второй сумматор, измерители задающего воздействия Л/и2 и возмущения WM1, третий сумматор, корректирующее звено WK и главную обратную связь, в которой для ком- пенсации ошибки осуществляется косвенное измерение задающего воздействия и возмущения.
Недостатком этой системы является ухудшение динамических характеристик ус- тройства при больших скоростях отработки, возникновение насыщения при больших сигналах рассогласования и отсутствие учета нелинейностей.
Из известных устройств наиболее близ- кой по назначению и технической сущности к предлагаемой является следящая система, которая имеет максимальное количество сходных существенных признаков с предлагаемой.
Недостатком этой следящей системы является ухудшение динамических характеристик устройства при больших скоростях отработки, возникновение автоколебаний при наличии люфта в редукторе объекта ре- гулирования.
Цель изобретения - повышение быстродействия и точности, а также уменьшение перерегулирования следящей системы.
Указанная цель достигается тем, что в следящую систему, содержащую первый сумматор, интегратор, формирователь импульсов, соединенный выходом с управляющим входом ключа, и последовательно соединенные усилитель мощности, исполнительный двигатель и объект управления, подключенный выходом к одному из входов измерителя рассогласования, другим входом соединенного с выходом задатчика, а выходом - с входом первого дискриминатора, подключенного выходом к входу усилителя, дополнительно введены второй дискриминатор, второй сумматор, модель исполнительного двигателя и датчик скорости, соединенный входом с выходом исполнительного двигателя, а входом - с вычитающим входом второго сумматора, подключенного суммирующим входом к выходу модели исполнительного двигателя, а выходом - к входу интегратора, соединенного выходом с первым входом первого сумматора, подключенного вторым входом к входу модели исполнительного двигателя и к входу первого дискриминатора, а выходом
-к первому информационному входу ключа, соединенного вторым информационным входом с выходом усилителя, а выходом - с входом усилителя мощности, выход измерителя рассогласования через второй дискриминатор соединен с входом формирователя импульсов.
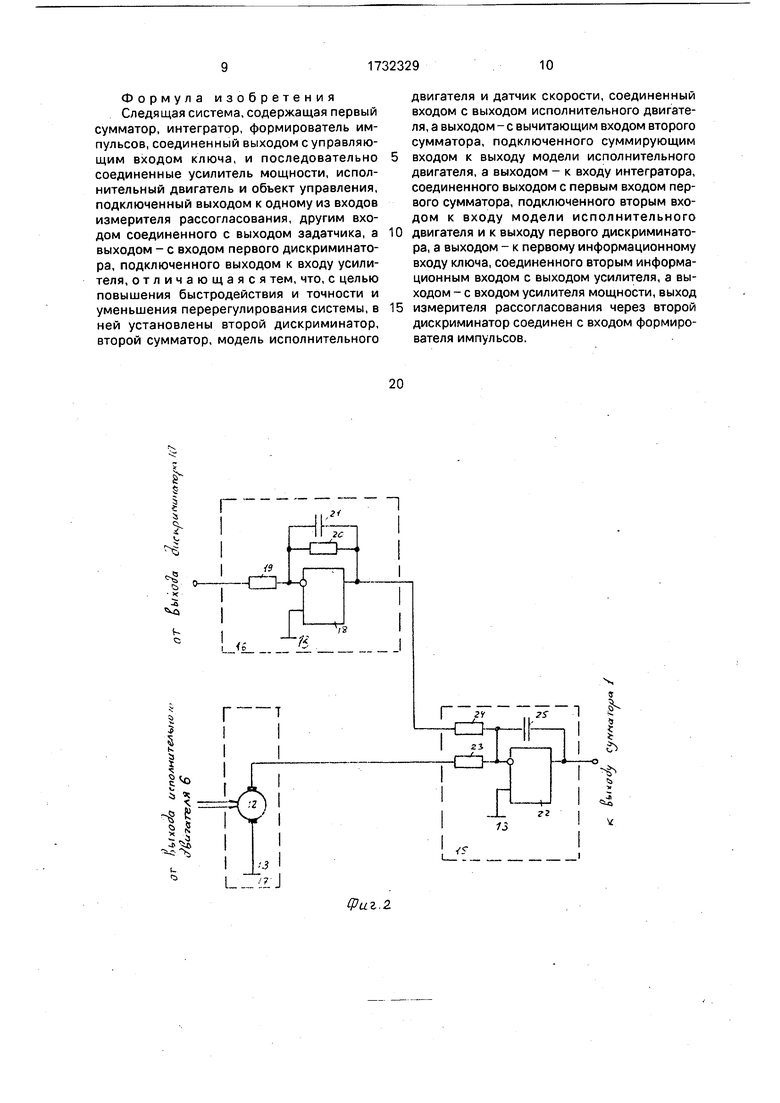
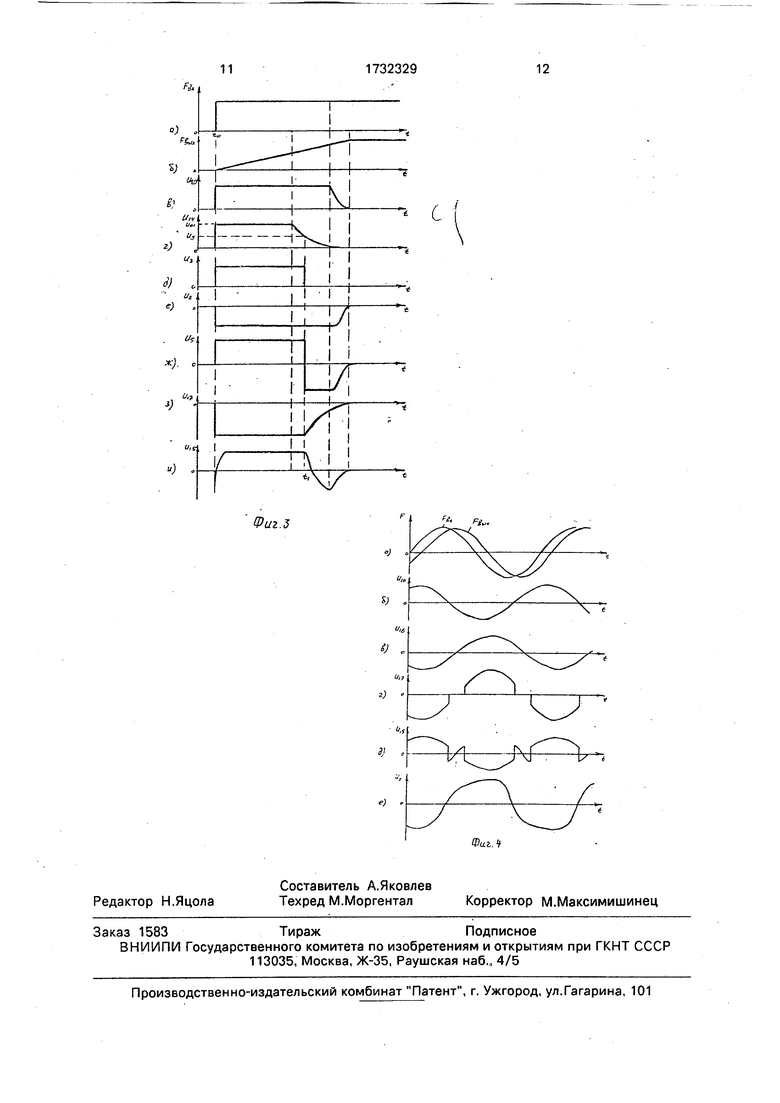
На фиг.1 представлена функциональная схема следящей системы; на фиг.2 - фрагмент электрической принципиальной схемы; на фиг.З и 4 - временные диаграммы, поясняющие работу системы.
Следящая система (фиг.1) содержит сумматор 1, интегратор 2, формирователь 3 импульсов, соединенный выходом с управляющим входом ключа 4, и последовательно соединенные усилитель 5 мощности, исполнительный двигатель 6 и объект 7 управления, подключенный выходом к одному из входов измерителя 8 рассогласования, другим входом соединенного с выходом задатчика 9, а выходом - с входом дискриминатора 10, подключенного к входу усилителя 11.
Следящая система дополнительно содержит второй дискриминатор 14, второй сумматор 15, модель исполнительного двигателя 16 и датчик 17 скорости, соединенный входом с выходом исполнительного двигателя 6, а выходом - с вычитающим входом второго сумматора 15, подключенного суммирующим входом к выходу модели исполнительного двигателя 16, а выходом - к входу интегратора 2, соединенного выходом с первым входом первого сумматора 1, подключенного вторым входом к входу модели исполнительного двигателя 16 и к выходу первого дискриминатора 10, а выходом
-к первому информационному входу ключа 4, соединенного вторым информационным входом с выходом усилителя 11, а выходом
- с входом усилителя 5 мощности, выход измерителя 8 рассогласования через второй дискриминатор 14 соединен с входом формирователя импульсов 3. Датчик 17 скорости содержит тахогенератор 12 и общую шину 13.
Модель исполнительного двигателя 16 (фиг.2) может быть выполнена, например, на операционном усилителе 18, включенном по схеме инвертирующего усилителя с резистором 19, подключенным к инвертирующему входу, и резистором 20 и конденсатором 21, включенным параллельно в цепь обратной связи.
Сумматор 15 (фиг.2) может быть совмещен с интегратором 2 и выполнен на операционном усилителе 22, включенном по схеме сумматора-интегратора, с резисторами 23 и 24, подключенными к инвертирующему входу, и конденсатором 25, включенным в цепь обратной связи. Резистор 23 также подключен к выходу датчика 17 скорости, который может быть выполнен, например, в виде тахогенератора постоянного тока, вал которого механически соединен с выходом исполнительного двигателя 6. Резистор 24 подключен также к выходу модели исполнительного двигателя 16.
Следящая система (фиг1) работает следующим образом.
Входной сигнал от задатчика 9 поступает на вход измерителя 8 рассогласования, на второй вход которого поступает выходной сигнал объекта 7 управления. Выходной сигнал измерителя 8 рассогласования представляет собой ошибку следящей системы в виде сигнала промежуточной частоты и поступает на вход дискриминаторов 10 и 14, выходные сигналы которых представляют собой ошибку системы в виде напряжения постоянного тока:
ff { F - F „, ) при |Г.,-Г „13Дю ™(F. -Fiu,) при IF., -P.., I Д га
TnV+l( - ) при «1а4м UotsgnfF., -F.U1) при IF,, -P., ,
0)
(2)
где Uio, Ui4 - выходные напряжения дискриминаторов 10 и 14 соответственно;
Кю, Ki4 - коэффициенты передачи дискриминаторов 10 и 14;
FBX, Рвых - входной и выходной сигналы системы;
А ю , А14 - величина зоны линейности дискриминаторов 10 и 14 соответственно;
Тю, Ti4 - постоянные времени дискриминаторов 10 и 14;
DOI напряжение ограничения выходного сигнала.
0
5
0
5
0
5
0
5
0
5
Выходное напряжение дискриминатора 14 поступает на вход формирователя 3 импульсов, на выходе которого в зависимости от величины ошибки Uio, формируется логический сигнал из
(1 при lUiol Uy,
(3)
(Опри lUiol 2:Uy,
где Uy - напряжение уставки формирователя 3 импульсов.
Выходной логический сигнал Us формирователя 3 импульсов поступает на управляющий вход ключа 4, который подключает вход усилителя 5 мощности к выходу предварительного усилителя 11 или сумматора 1 в зависимости от величины ошибки системы.
При большом значении ошибки, когда выходное напряжение дискриминатора IUi4l 2: Uy, сигнал дискриминатора 10 через предварительный усилитель 11 и ключ 4 поступает на вход усилителя 5 мощности. При этом обеспечивается высокая скорость отработки.
При отработке малых рассогласований, когда IUi4l Uy, на вход усилителя 5 мощности поступает сигнал с выхода сумматора 1:
Ui K1iU2+Ki2Uio,(4)
где Ki и К12 - коэффициенты передачи сумматора 1 по первому и второму входам соответственно;
U2 выходное напряжение интегратора 2.
Напряжение U2 может быть представлено в виде
Г-К2 /Uexdt при IK2 / Uuxdtl 02 (5)
(4Jo2sgn(K2 / Uexdt) при IK2 / UBXdtl Uo2, где К2- коэффициент передачи интегратора 2;
Uo2 напряжение ограничения выходного сигнала интегратора;
UBX Ki51Uie - Ki41Ki Ј2- входное напряжение интегратора 2;
KIS и Kis - коэффициенты передачи сумматора 15 по первому и второму входам соответственно;
Ui6 выходное напряжение модели исполнительного двигателя 16;
коэффициент передачи датчика частоты вращения;
Q- частота вращения вала исполнительного двигателя.
Выходной сигнал модели исполнительного двигателя 16 имеет вид К 16
U 16 -
U ю
(7)
Tiep + 1 где Ki6 KnKsKeKi - коэффициент передачи;
TIG Те - постоянная времени модели 16;
Те - механическая постоянная времени исполнительного двигателя 6;
Uю - входное напряжение.
На выходе модели 16 формируется напряжение, пропорциональное идеальной скорости вращения вала двигателя 6 (при условии малой электромагнитной постоянной времени двигателя ТЭм Те).
При отработке больших рассогласований, когда значение сигнала ошибки (Рвх- Рвых) больше, чем величины зон линейности дискриминаторов Д ю и Д-и , выходные напряжения дискриминаторов 10 и 14 постоянным и в соответствии с выражением (2) равны по величине (фиг.За, б. в). При этом частота вращения Ј2вала двигателя 6 будет также постоянной. Напряжение на выходе интегратора 2, как следует из выражения (6), будет иметь в установившемся режиме (to- ti) постоянную величину, которая приведет к насыщению интегратора 2, т.е. к возникновению на его выходе постоянного напряжения (фиг.Зе). При уменьшении рассогласования, в момент времени ц, изменяется сигнал на выходе формирователя 3 импульсов(фиг.Зг, д). При этом интегратор 2 через сумматор 1 и ключ 4 подключается к усилителю 5 мощности, на выходе которого появляется сигнал, противоположный по знаку сигналу управления до момента времени ti. Поэтому двигатель 6 входит в режим торможения, что приводит к уменьшению входного напряжения интегратора 2 (фиг.Зе) согласно выражению (6), и через время, определяемое постоянной времени Т2 1/Ка, а также разностью идеальной и реальной частоты вращения двигателя, интегратор разряжается, уменьшает напряжение на двигателе 6 (фиг.Зж) и система переходит в режим отработки малых рассогласований.
Положительный технический эффект от применения предлагаемой системы по сравнению с известной заключается в увеличении быстродействия, точности и уменьшении перерегулирования системы.
Указанный эффект подтверждается следующим расчетом. При отработке больших рассогласований за счет выбора коэффициентов передачи усилителя Кп, усилителя мощности Ks и исполнительного двигателя Кб обеспечивает максимальная скорость отработки, равная
Q KnKsKeUio.
При отработке малых рассогласований в системе уменьшается добротность для обеспечения устойчивости и апериодического переходного процесса. Интегратор 2, включенный в корректирующую цепь, компенсирует влияние напряжения трогания и обеспечивает высокую точность системы.
При этом интегратор 2 работает в линейной зоне (без насыщения). Диаграммы выходных сигналов блоков следящей системы при малых рассогласованиях представлены на фиг.4. Для наглядности форма сигнала на
входе принята условно, так как реальное входное воздействие системы (температурные изменения частоты магнетрона) имеют случайный характер.
Передаточная функция системы при отработке малых рассогласований может быть представлена в виде Wp() aк.оМ ту+Тзри)
PS2ski7(T,0p UT16p+ HTЈp4Tsp,}
где К - коэффициент передачи объекта управления;
Т2 Й1Л6т, Kl
Т К1бК2 3 К2К16
,
К5КбК15К17К2
Ks коэффициент передачи усилителя мощности 5;
Ке - коэффициент передачи исполни- тельного двигателя 6;
Кп - коэффициент передачи датчика скорости 17.
К 5 К 6 К 15 К 17 К 2
Причем введение дополнительного интегратора не увеличивает порядок астатиз- ма системы, т.е. система имеет астатизм первого порядка.
На предприятии были проведены лабораторные испытания предлагаемой следящей системы, в состав которой входят: исполнительный двигатель ДПР 42-Н1-02 с коэффициентом передачи Ке 222 об/В х мин и постоянной времени Те 20 мс; тахогенератор 1,6 ТГП-2; редуктор; имитатор объекта управления и дискриминаторов с параметрами; рабочий диапазон 120 град, Кю 20 В/град, Л ю 0,1 град, Uoi 4 В, Ки 5 В/град, Ai4 0,5 град, Uy 2 В,
Тю 5 мс. Известная следящая система при согласовании угла рассогласования 120 град имеет скорость отработки 6 град/с, перерегулирование 20%, время переходного процесса 0,2-0,3 с, точность 0,1-0,2 В ((на
выходе дискриминатора 10). Данная следящая система имеет скорость отработки 50 град/с, перерегулирование 0-10%, время переходного процесса 0,05-0,1 с, точность 0,02-0,05 В.
Формула изобретения Следящая система, содержащая первый сумматор, интегратор, формирователь импульсов, соединенный выходом с управляющим входом ключа, и последовательно соединенные усилитель мощности, исполнительный двигатель и объект управления, подключенный выходом к одному из входов измерителя рассогласования, другим входом соединенного с выходом задатчика, а выходом - с входом первого дискриминатора, подключенного выходом к входу усилителя, отличающаяся тем, что, с целью повышения быстродействия и точности и уменьшения перерегулирования системы, в ней установлены второй дискриминатор, второй сумматор, модель исполнительного
0
5
двигателя и датчик скорости, соединенный входом с выходом исполнительного двигателя, а выходом - с вычитающим входом второго сумматора, подключенного суммирующим входом к выходу модели исполнительного двигателя, а выходом - к входу интегратора, соединенного выходом с первым входом первого сумматора, подключенного вторым входом к входу модели исполнительного двигателя и к выходу первого дискриминатора, а выходом - к первому информационному входу ключа, соединенного вторым информационным входом с выходом усилителя, а выходом - с входом усилителя мощности, выход измерителя рассогласования через второй дискриминатор соединен с входом формирователя импульсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1980 |
|
SU1007082A1 |
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| Следящая система | 1986 |
|
SU1427327A1 |
| Следящая система | 1990 |
|
SU1829024A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
| Следящая система | 1977 |
|
SU661501A1 |
| Следящая система | 1990 |
|
SU1833831A1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
Изобретение относится к области автоматического управления и позволяет повысить быстродействие и точность и уменьшить перерегулирование следящей системы. Система содержит первый сумматор 1, интегратор 2, формирователь импульсов 3, соединенный выходом с управляющим входом ключа 4, и последовательно соединенные усилитель мощности 5, исполнительный двигатель 6 и объект управления 7, подключенный выходом к одному из входов измерителя рассогласования 8, другим входом соединенного с выходом за- датчика 9, а выходом - с входом первого дискриминатора 10, подключенного выходом к входу усилителя 11. Кроме того, система содержит второй дискриминатор, второй сумматор, модель исполнительного двигателя 14 и датчик скорости 15, соединенный входом с выходом исполнительного двигателя 6, а выходом - с вычитающим входом второго сумматора 13, подключенного суммирующим входом к выходу модели исполнительного двигателя 14, а входом - к входу интегратора 2, соединенного выходом с первым входом первого сумматора 1, подключенного вторым входом к входу модели исполнительного двигателя 14 и к выходу первого дискриминатора 10, а выходом - к первому информационному входу ключа 4, соединенного вторым информационным входом с выходом усилителя 11, а выходом - с входом усилителя мощности 5, выход измерителя рассогласования через второй дискриминатор соединен с входом формирователя импульсов 3. 4 ил. со с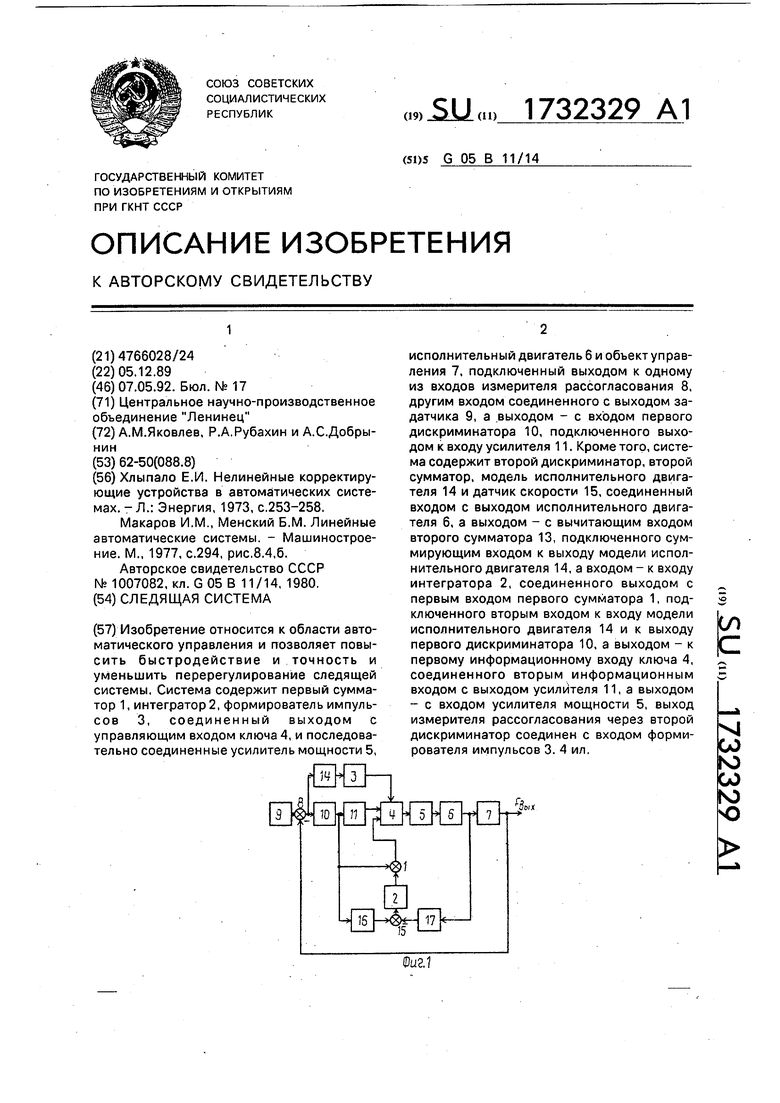
L .Til J
Фиг 2
гг
13
ж)
)
о
Фиг J
С f
а,
Ре„.
7
ФиЛ f
| Хлыпало Е.И | |||
| Нелинейные корректирующие устройства в автоматических системах | |||
| - Л.: Энергия, 1973, с.253-258 | |||
| Макаров И.М , Менский Б.М | |||
| Линейные автоматические системы | |||
| - Машиностроение | |||
| М., 1977, с.294, рис.8.4,б | |||
| Следящая система | 1980 |
|
SU1007082A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
