CPIJ2.1
Изобретение относится к электротехнике, а именно к автоматическим устройствам для управления электроприводами переменного тока, и может быть использовано в системах регулируемого асинхронного электропривода в текстильной промышленности и в других отраслях.
Цель изобретения - повышение точ- HJocTH регулирования,
I На фиг. 1 представлена функцио- нЬльная схема частотно-регулируемого э|пектроприво да; на фиг, 2 - схема мо- д|епи асинхронного двигателя, Частотно-регулируемый электропри- в(од содержит асинхронньш двигатель 1 (|фиг, 1) с короткозамкнутым ротором, Йодключенный к выходам инвертора 2 Напряжения, блок 3 управления часто- 4ой и модулем напряжения с двумя вхо- Дами, первьй из которых соединен с . выходом блока 4 задания вектора на- йряжения, а выход подключен к управляющему входу инвертора 2 напряжения, формирователь 5 составляющих вектора 1апряжения, последовательно соединен- йые элемент 6 сравнения, один из вхо- хов которого предназначен для подачи Ьигнала задания потокосцепления, ре- Ьулятор 7 потокосцепления, элемент 8 уравнения, регулятор 9 намагничиваю- цей составляющей тока статора, последовательно соединенные задатчик 10 интенсивности, вход которого предна- значен для подачи сигнала задания частоты вращения, элемент 11 сравнения, регулятор 12 частоты вращения,, блок 13 деления, элемент 14 сравнения, регулятор 15 активной составляющей тока статора, выход которого и выход регулятора 9 намагничивающей составляющей тока статора подключены к входам формирователя 5 составляющих напряжения, также модель 16 инвертора напряжения, подключенную входом к выходу блока 3 управления частотой и модулем напряжения, а выходом - к входу преобразователя 17 числа фаз, блок 18 вычисления модуля потокосцеп ления, блок 19 вьшолнения частоты вращения, модель 20 асинхронного дви гателя, каждая фаза которого вьшолне на по Т-образной схеме замещения, В частотно-регулируемый электропривод введены блок 21 вычисления модуля ЭДС, блок 22 вычисления модуля тока ротора, блок 23 вычисления модулей составляющих тока статора, блоки 24
и 25 вычисления модулей падения напряжения на индуктивных сопротивлениях рассеяния статора и ротора фазных Т-образных схем замещения, сумматоры , усилитель 29 и блок 30 минимизации угла между ЭДС и током ротора, входы которого подключены к выходам блоков 2 VI 22 вычисления модуля ЭДС и модуля тока ротора, а выход соединен с вторым входом (управления частотой) блока 3. При этом выходы формирователя 5 составлярнщх напряжения соответственно через сумматоры 26 и 27 подключены к входам блока4 задания вектора напряжения. Другие входы сумматора 26 подключены соответственно к вьпсодам блока 21 вычисления модуля ЭДС и блока 24, Вход усилителя 29 объединен с другим входом блока 13 деления и подключен к выходу блока 18 вычисления модуля потокосцепления. Другой вход элемента 11 сравнения подключен к выходу блока 19 вычисления частоты вращения, соединенного входом с выходом момента модели 20,
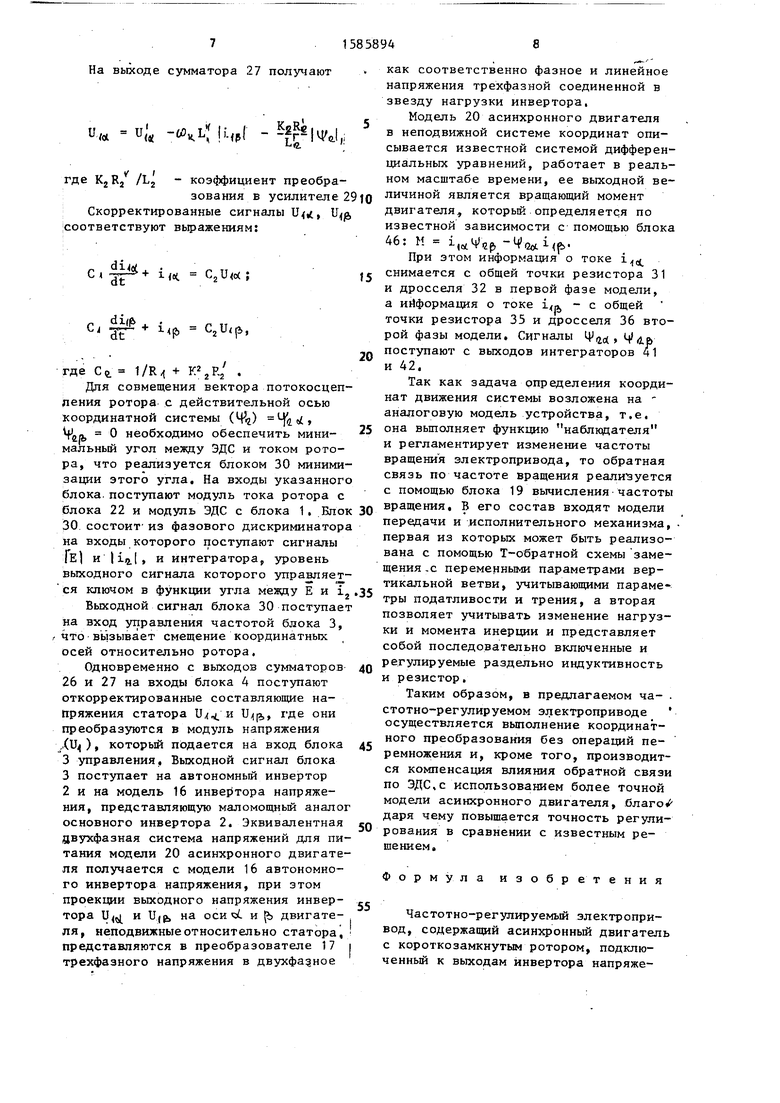
Модель 20 асинхронного двигателя в каждой фазе вьшолнена по Т-образной схеме замещения. Каждая фаза модели (фиг, 2) составлена из последовательно включенных резистора 31, дросселей 32 и 33 и резистора 34 в первой фазе, резистора 35, дросселей 36 и 37 и резистора 38. во второй фазе, моделирующих соответственно активные и индуктивные сопротивления рассеяния статора и ротора и образующих горизонтальную ветвь схемы замещения. Кроме того, схемы замещения фаз включают дроссели 39 и 40, моделирующие соответственно сопротивления взаимоиндук- |ции. Модель 20 содержит также два интегратора 41 и 42, элементы 43 и 44 умножения, инвертирующий усилитель 45 и блок 46 вычисления момента.
При этом входы интеграторов 41 и 42 подключены соответственно к общим точкам соединения резистора 34 и дросселя 33 первой фазы и резистора 38 и дросселя 37 второй фазы. Выход интегратора 41 через элемент 43 умножения соединен со свободным выводом резистора 38 второй фазы. Выход интегратора 42 через инвертирующий уси- литель 45 и элемент 44 умножения соединен со свободным выводом резистора 34 первой фазы. Другие входы.элементов 43 и 44 умножения объединены между собой и подключены к выходу блока
51585894
19 вычисления частоты вращения. Выходы интеграторов 41 и 42 подключены к входаг- блока 18 вычисления модуля . потокосцепления. Общие точки резисто , ра 31 и дросселя 32, резистора 35 и дросселя 36, а также выходы интеграторов 41 и 42 подключены к входам блока 46 вычисления момента, соединенного выходом с входом блока 19. вы- Q числения частоты вращения.
Выводы резисторов 39 и 40 подклю-.- чены к входам блока 21 вычисления модуля эдс.
Выводы резисторов 34 и 38 подключены к входам блока 22 вычисления модуля тока ротора. Общая точка резистора 35 и дросселя 36 и общая точка резистора 31 и дросселя 32 подключены к входу блока 23 вычисления модулей составляющих тока статора.
Выводы последовательно соединенных дросселей 32 и 33 в первой фазе и / дросселей 36 и 37 во второй фазе под, С, i;/R,+ ; -Ч I s суммарная индуктив
ность рассеяния статора и ротора; - активные сопротивления
статора и ротора; коэффициент магнитной
связи ротора;
- взаимоиндуктивность об- обмоток статора и ротора.
Сигналы и( и , далее корректируются с целью полной развязки конту- 5 ров регулирования потокосцепления и электромагнитного момента и поступают на входы блока задания вектора напря- женин,
Сигналы фазных потокосцеплений j 20 Hjb выходов интеграторов 41 и 42 поступают на входы блока 18 вычисления модуля потокосцепления, выходной сигнал которого поступает в каче„ .-.г.. .„ .„„стве сигнала обратной связи на элемент
ключены к входам блоков 24 и 25 соот- 25 сравнения, а также на вход усилите- ветственно, . 29,
Частотно-регулируемый электропри- блоке 25 вычисляется модуль (flU)
вод работает следующим образом,.падения напряжения на индуктивных соСигнал задания ( через элемент противлениях рассеяния статора и ро- 6 сравнения поступает на вход регуля- 30- второй фазы, реализованных дрос- тора 7 потокосцепления, которьй фор-.селями 36 и 37 по выражению
мирует переходный процесс установления заданного потокосцепления ротора. На выходе указанного регулятора 7 формируется задание регулятору 9 для намагничивающей составляющей тока, статора.
Другой сигнал задания со ч через за- датчик 10 интенсивности и элемент 11 сравнения поступает на вход регулятора 12 частоты вращения, выходной сигнал которого после деления в блоке 13 на модуль потокосцепления оп- ределяет задание для регулятора 15 активной составляющей тока статора.
Выходные сигналы регуляторов 9 и 15 u.i|til , uiips поступают на входы фор- мироватепя 5 составляюпщх напряжения, при этом выполняется следующее:
35
40
45
W,.L i |i,pl,
где ОЭк,- частота вращения вектора по - токосцепления ротора, приве-; денная к числу пар полюсов, равному единице, В блоке 24 вычисляется модуль luU Iпадения- напряжения на индуктивных сопротивлениях статора и ротора . первой фазы, реализованных с помощью дросселей 32 и 33, по выражению
U -VI 05t L ; I i,|.
Ha выходе сумматора 26 получают (
и
р
и +б5нь1 - -Е,
тде |Е| - ч модуль ЭДС, формируемьй с помощью блока 21, по сигналам Ej(, Ер,, снимаемьм с выводов сопротивлений взаимоиндукции, реализо- ванных дросселями 39 и 40,
1 iT
и
9
duiji dt
где и/л, Ul g,
-с7
Ч
и
Ф
- напряжения на выходах блока 5;
, С, i;/R,+ ; -Ч I s суммарная индуктив
ность рассеяния статора и ротора; - активные сопротивления
статора и ротора; коэффициент магнитной
связи ротора;
- взаимоиндуктивность об- обмоток статора и ротора.
Сигналы и( и , далее корректируются с целью полной развязки конту- ров регулирования потокосцепления и электромагнитного момента и поступают на входы блока задания вектора напря- женин,
Сигналы фазных потокосцеплений j Hjb выходов интеграторов 41 и 42 поступают на входы блока 18 вычисления модуля потокосцепления, выходной сигнал которого поступает в каче
W,.L i |i,pl,
где ОЭк,- частота вращения вектора по - токосцепления ротора, приве-; денная к числу пар полюсов, равному единице, В блоке 24 вычисляется модуль luU Iпадения- напряжения на индуктивных сопротивлениях статора и ротора . первой фазы, реализованных с помощью дросселей 32 и 33, по выражению
U -VI 05t L ; I i,|.
Ha выходе сумматора 26 получают (
и
р
и +б5нь1 - -Е,
тде |Е| - ч модуль ЭДС, формируемьй с помощью блока 21, по сигналам Ej(, Ер,, снимаемьм с выводов сопротивлений взаимоиндукции, реализо- ванных дросселями 39 и 40,
IEI р„4ок |м/ где р - число пар полюсов двигат еля (JL) - частота вращения ротора.
На выходе сумматора 27 получают
w и;, -« кЬ Цр - -1,:
где KjR/ /Lj - коэффициент преобразования в усилителе 29 ю Скорректированные сигналы , :соответствуют выражениям:
C..i,, С,
dt
Uw;
c,gS.
p ,
ТГ2 Р
где Се. 1/R-( +
Для совмещения вектора потокосцеп- ления ротора с действительной осью координатной системы () необходимо обеспечить мини- мальный угол между ЭДС и током ротора, что реализуется блоком 30 минимизации этого угла. На входы указанного блока, поступают модуль тока ротора с | 5лока 22 и модуль ЭДС с блока 1. Блок 30. СОСТОИТ из фазового дискриминатора на входы которого поступают сигналы ТЕ) и , и интегратора, уровень выходного сигнала которого управляется ключом в функции угла между Е и i
Выходной сигнал блока 30 поступает на вход управления частотой блока 3, что вызывает смещение координатных осей относительно ротора.
Одновременно с выходов сумматоров 26 я 27 на входы блока 4 поступают откорректированные составляющие напряжения статора Ux,( и ,, где они преобразуются в модуль напряжения ,,(и )« которьй подается на вход блока 3 управления. Выходной сигнал блока 3 поступает на автономный инвертор 2 и на модель 16 инвертора напряжения, представляющую маломощный аналог основного инвертора 2. Эквивалентная двухфазная система напряжений для питания модели 20 асинхронного двигателя получается с модели 16 автономного инвертора напряжения, при этом проекции выходного напряжения инвертора у и U,g, на осичС и Ъ двигателя, неподвижные относительно статора представляются в преобразователе 17 i трехфазного напряжения в двухфазное
5
0
5 0 5
0
5
0
5
как соответственно фазное и линейное напряжения трехфазной соединенной в звезду нагрузки инвертора,
Модель 20 асинхронного двигателя в неподвижной системе координат описывается известной системой дифференциальных уравнений, работает в реальном масщтабе времени, ее выходной величиной является вращающий момент двигателя, который определяется по известной зависимости с помощью блока 46: И 1, (.
При этом информация о токе снимается с общей точки резистора 31 и дросселя 32 в первой фазе модели, а ийформация о токе - с общей точки резистора 35 и дросселя 36 второй фазы модели. Сигналы tiaLt Ц й.й поступают с выходов интеграторов 41 и 42.
Так как задача определения координат движения системы возложена на - аналоговую модель устройства, т.е. она вьшолняет функцию наблюдателя и регламентирует изменение частоты вращения электропривода, то обратная связь по частоте вращения реализуется с помощью блока 19 вычислениячастоты вращения, В его состав входят модели передачи и исполнительного механизма, . первая из которых может быть реализована с помощью Т-обратной схемы замещения ,с переменными параметрами вертикальной ветви, учитывающими параметры податливости и трения, а вторая позволяет учитывать изменение нагрузки и момента инерции и представляет собой последовательно включенные и регулируемые раздельно индуктивность и резистор.
Таким образом, в предлагаемом ча- . стотно-регулируемом электроприводе осуществляется выполнение координатного преобразования без операций перемножения и, кроме того, производится компенсация влияния обратной связи по ЭДС,с использованием более точной модели асинхронного двигателя, благой даря чему повыщается точность регулирования в сравнении с известным решением.
Формула изобретения
Частотно-регулируемый электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, подключенный к выходам инвертора напряжения, блок управления частотой и модулем напряжения с двумя входами, первый из которых соединен с выходом блока задания вектора напряжения, а выход подключен к управляющему входу инвертора напряжения, формирователь составляющих вектора напряжения, последовательно соединенные первый элемент сравнения с входом для сигнала задания потокосдепления, регулятор потокосцепления, второй элемент сравнения, регулятор намагничивающей составляющей тока статора, последовательно соединенные задатчик интенсивности с входом для сигнала задания частоты вращения, третий элемент сравнения регулятор частоты вращения блок деления, четвертый элемент сравнения, регулятор активной составляющей тока статора, выход которого и выход регулятора намагничивающей составляющей тока статора подключены к входам формирователя составляющих вектора напряжения, модель инвертора напряжения, подключенную входом к выходу блока управления частотой и модулем напряжения, а выходом - к входу преобразователя числа фаз, блоки вычисления модуля потокосцепления и частоты вращения и модель асинхронного двигателя.с двумя интеграторами, двумя элементами умножения, инвертирующим усилителем, блоком вычисления момента, вьшолненная в каждой фазе др Т-обр.азной схеме замещения, причем каждая фаза модели составлена в горизонтальной ветви из последовательно включенных резисторов и дросселей, моделирую цих соответственно эквивалентные активное и индуктивное сопротивления статора, индуктивное и активное сопротивления ротора, а в вертикальной ветви - из дросселя, моделирующего -сопротивление взаимоиндукции, входы интеграторов подключены соответственно к общим точкам соединения ре зистор.а и дросселя, моделирующих активное и индуктивное сопротивления ротора в каждой фазе Т-образной схе- мы замещения, выход первого интегратора через первый элемент умножения соединен со свободным выводом резистора, моделирующего активное сопротивление ротора во второй фазе, выход второго интегратора через инвертирующий усилитель соединен через второй элемент умножения со свободным выводом резистора, моделирующего ак0
5
0
5
0
5
0
5
0
5
тивное сопротивление ротора в первой фазе, другие входы элементов умножения объединены и подключены к выходу блока вычисления частоты вращения, соединенного выходом с другим входом тре.тьего элемента сравнения, выходы интеграторов подключены к входам блока вычисления модуля потокосцепления., выход которого соединен с другим входом первого элемента сравнения и с другим входом блока деления, общие точки резисторов и дросселей, моделирующих активное и индуктивное сопротивления : Статора в каждой фаз.е Т-образной схемы замещения, и выходы интеграторов подключены к входам блока вычисления момента, соединенного выходом с входом блока вычисления частоты вращения, отличающийся тем, что, с целью повышения точности регулирования,введены блоки вычислений модуля ЭДС, модуля тока ротора, модулей составляющих тока статора, модулей падений напряжений на индуктивных сопротивлениях рассеяния ста- тора и ротора фазньсх Т-образных схем замещения, три сумматора, усилитель и блок минимизации угла между ЭДС и ТОКОМ ротора, входы которого подключены к выходам блоков вычисления модуля ЭДС и модуля тока ротора, а выход соединен с вторым входом блока управления частотой и модулем напряжения, при этом выходы формирования составлящих напряжения соответственно через первый и второй сумматоры подключены к входам блока задания вектора напряжения, другие входы пер вого сумматора подключены соответственно к выходам блока вычисления- модуля ЭДС и блока вычисления падения напря.жения на индуктивном сопротивлении рассеяния статора и ротора Т-образной схемы замещения первой фазы, другой вход второго сумматора соединен с выходом третьего сумматора, подключенного входами к выходу блока вычисления падения напряжения на- индуктивном сопротивлении рассеяния статора и ро.тора Т-образной схемы замещения второй фазы и к выходу усилителя, соединенного с выходом блока вычи-н сления модуля потокосцепления, выводы дросселей, моделирующих сопротивление взаимоиндукции в каждой фазе Т-образт ной схемы замещения, подключены к входам блока вычисления модуля ЭДС, выводы резисторов, моделирующих ак-:
11
1585894
тивные сЪпротивпения ротора в каждой фазе Т-образной схемы замещенияр подключены к входам блока вычисления модуля тока ротора, выводы общих точек резистора и дросселя, моделирующих активное и индуктивное сопротивления статора первой и второй фаз Т-образных схем замещения, подключены к входам блоков вычисления модулей состав- ляющих тока статора, а выводы после12
довательно включенных дросселей, моделирующих индуктивные сопротивления рассеяния статора и ротора в каждой фазе Т-образной схемы замещения, подключены к входам соответствующих блоков вычисления падений напряжений на индуктивных сопротивлениях статора и ротора Т-образных схем замещения фаз.

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1983 |
|
SU1128361A1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| Частотно-регулируемый асинхронный электропривод | 1984 |
|
SU1184064A1 |
| Устройство для измерения вращающего момента асинхронного электродвигателя | 1977 |
|
SU750298A1 |
| Устройство для моделирования @ -фазного вентильного электродвигателя | 1990 |
|
SU1797133A1 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
| Устройство для регулирования асинхронного двигателя | 1983 |
|
SU1202006A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2331152C1 |
Изобретение относится к электротехнике и может быть использовано в системах регулируемого асинхронного электропривода текстильной промышленности и в других отраслях. Целью изобретения является повышение точности регулирования. Указанная цель достигается тем, что в частотно-регулируемый электропривод введены блок 21 вычисления модуля ЭДС, блок 22 вычисления модуля тока ротора, блок 23 вычисления модуля тока статора, блоки 24, 25 вычисления падения напряжений на индуктивных сопротивлениях статора и ротора, сумматоры 26 - 28, усилитель 29 и блок 30 минимизации угла между ЭДС и током ротора. При этом выполнение координатного преобразования производится без операций перемножения и кроме того, компенсируется влияние обратной связи по ЭДС с использованием более точной модели 20 асинхронного двигателя, благодаря чему повышается точность регулирования. 2 ил.
f/,
М
1Л
i
40
Впюраяфахг
. hA
Фиг. I
i
- hV
.-7 46 -
..
f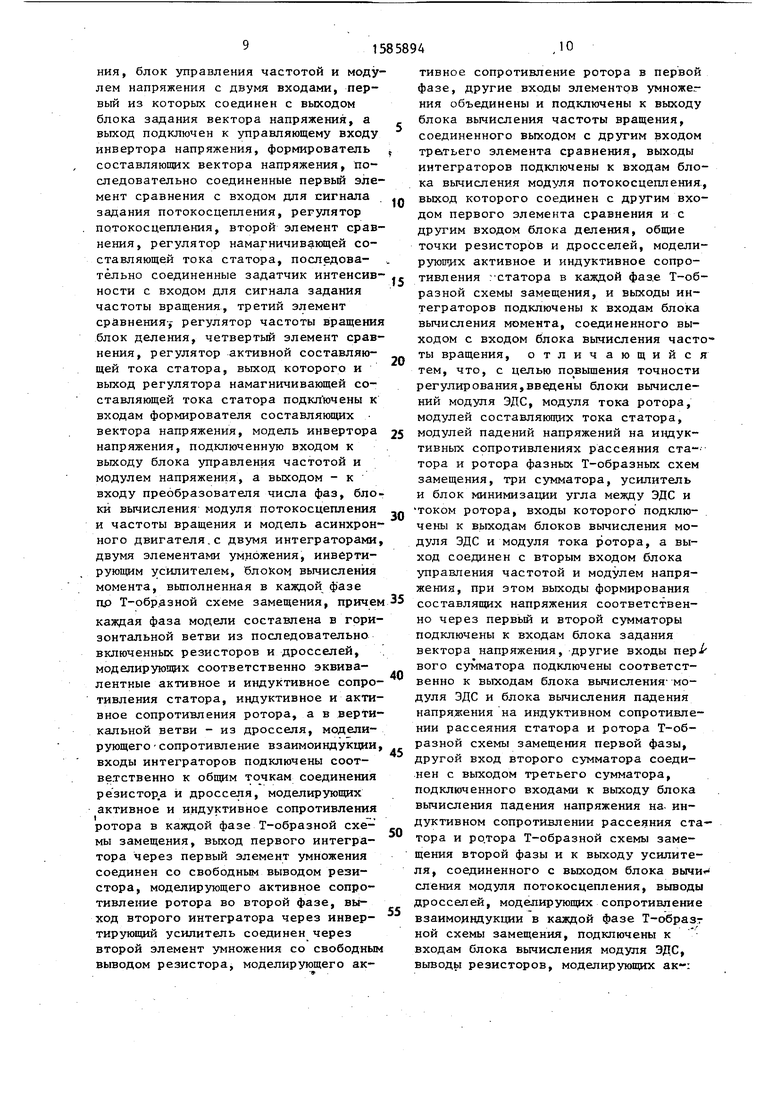
| Частотно-регулируемый асинхронный электропривод | 1984 |
|
SU1184064A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Башарин А | |||
| В | |||
| и др | |||
| Управление электроприводами | |||
| Л.: Энергоиздат, 1982 | |||
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
