Изобретение относится к радиоастрономии и может быть использовано, например, в электроприводах антенн.
Цель, изобретения - повьппение помехозащищенности системы.
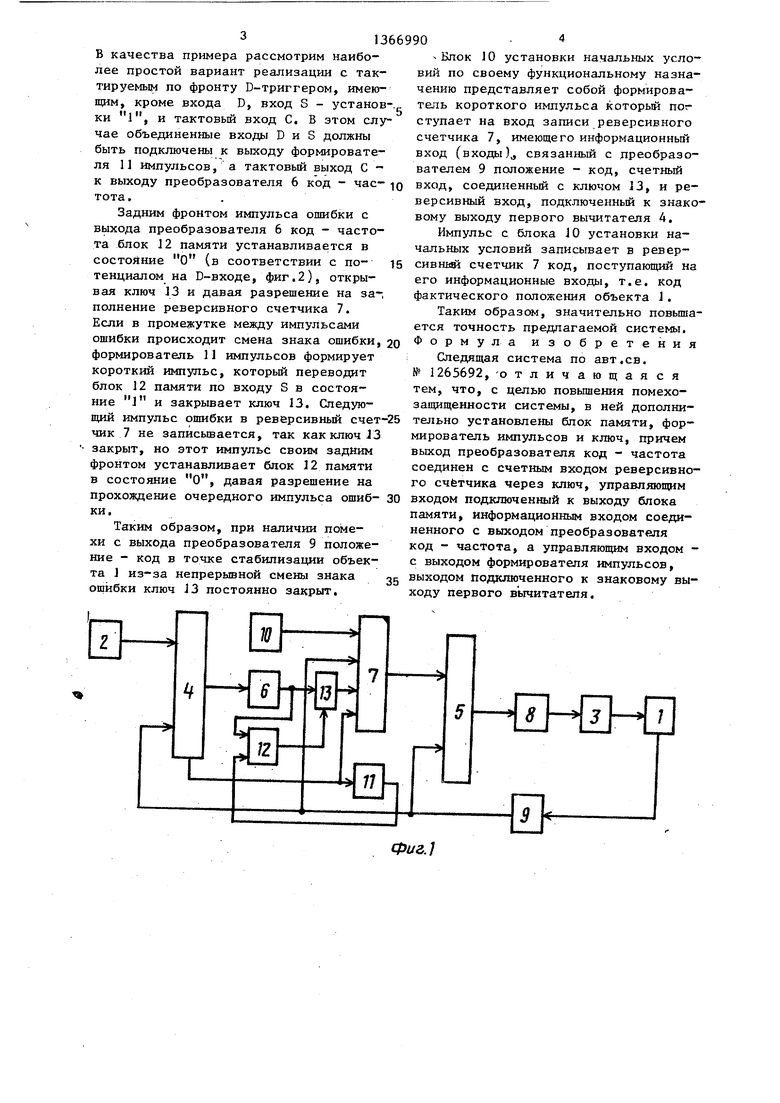
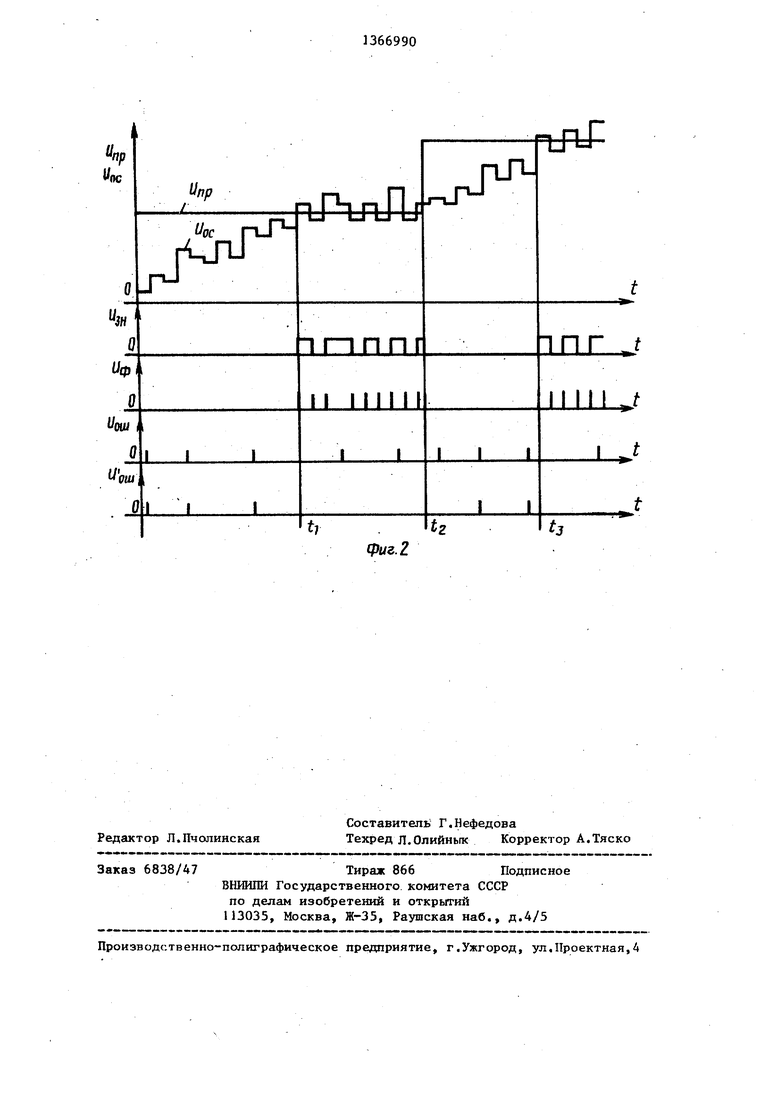
На фиг.1 приведена функциональная схема системы; на фиг.2 - диаграммы, иллюстрирующие работу системы.
ния установливается в заданное положение.
С этого момента времени, отмеченного на фиг.2 моментом t,, начинается стабилизация положения объекта J.
Наличие помехи на выходе преобразователя 9 положение - код приводит к тому, что ошибка приведения на вы
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения моментов экстремумов гармонических сигналов | 1981 |
|
SU1004899A1 |
| Следящая система | 1984 |
|
SU1265692A1 |
| Следящая система | 1985 |
|
SU1305628A2 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| Функциональный преобразователь | 1984 |
|
SU1211756A1 |
| Преобразователь угловых перемещений в код | 1982 |
|
SU1035627A1 |
| Телевизионное следящее устройство | 1982 |
|
SU1019672A2 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| Число-импульсный функциональный преобразователь | 1982 |
|
SU1043645A1 |
Изобретение относится к радиоастрономии, может быть использовано, например, в электроприводах антенн . Целью изобретения является повышение помехозащищенности системы. Поставленная цепь достигается следующим образом. В момент включения системы запоминается код, соответствующий первоначальному положению объекта. Код фактического положения объекта сравнивается с кодом заданного положения объекта. Модуль ра зности кодов преобразуется в импульсы и фиксируется уменьшение знака кода ошибки в интервалах между импульсами. оно происходит, то запрещается прохождение импульсов в реверсивный счетчик, а если нет - то разрешается. В реверсивном с етчике импульсы суммируются (или вычитаются в зависимости от знака кода ошибки) с запомненным кодом. Результат суммирования сравнивается с кодом фактического положения объекта. Результат, сравнения преобразуется в аналоговый вид и через исполнительный двигатель воздействует на объект, изменяя его положение. 2 ил. сл
Система содержит объект 1, задат- ю ходе первого вычитателя 4 не достига- ЧИК.2, исполнительный двигатель 3, первый 4 и второй 5 вьгчитатели, пре- образователь 6 код-частота, реверсивный счетчик 7, цифроаналоговьй преобразователь 8, преобразователь 9 поло- ig системе при каждой смене знака ошиб- жение - код, блок 10 установки началь ки формирователь JJ импульсов форми- ных условий, формирователь П оши бки и блок 12 памяти.
На фиг.2 приняты обозначения: код программного положения (в анало- i20 импульсь ошибки в реверсивный счет- говой форме); U - код обратной свя- чик 7, т.е. создается режим, соответ- зи (в аналоговой форме); сигнал ствующий режиму работы системы при знакового, разряда первого вычитателя 4; Уф - сигнал на выходе формирователя 11 импульсов; Up - сигнал на выходе преобразователя 6 код - час- TOTa;Up ; - сигнал на счетном входе
ет нуля, а становится знакопеременной с частотой помехи.
Дпя устранения автоколебаний и повышения точности регулирования в
рует импульс,-переводящий в О блок 12 памяти. В этом состоянии ключ 13 закрывается и не пропускает
реверсивного счетчика 7 (импульсы ошибки); t,, t 3 - мо1менты начала стабилизацииJ i момент изменения уставки программного положения.
Система работает следующим образом.
Координаты объекта J, задаваемые задатчиком 2, в двоичном коде (Uf,p) поступают на один вход первого вычитателя 4, другой вход которого соедиг нен с выходом преобразователя положен ние - код. Модуль разности кодов, coi ответствующий ошибке приведения, по- .ступает на вход преобразователя 6 код - частота, преобразующий код в импульсы ошибки CUjj) с частотой, пропорциональной ошибке. Эти импульсы через ключ J3 подаются на счетный вход реверсивного счетчика 7, которьй в зависимости от знака ошибки (сигнал знакового разряда первого вьгчи- тателя 4 Uj) переводится в режим сложения или вычитания. Скорость перемещения объекта 1 определяется частотой следования импульсов с выхода преобразователя 6 код - частота. При подходе объекта 1 к заданной координате приближается к нулю ошибка прив дения (код на выходе первого вычитателя 4) и, соответственно, частота заполнения реверсивного счетчика 7. Объект J плавно без перерегулирова30
35
нулевой ошибке, когда импульсы ошибки не поступают на реверсивный счетчик 7. 25 Для обеспечения возможности перемещения объекта J из этого устойчивого положения, необходимо вывести блок 12 памяти из состояния О и открыть ключ 13 при отсутствии изменения знака ошибки в интервалах времени между импульсами ошибки. Для этого выход преобразователя 6 код - частота соединен с блоком 12 памяти таким образом, чтобы задним фронтом каждого импульса переводил блок 12 памяти в состояние 1.
На фиг.2 начиная с момента времени t2 показаны процессы в системе при переходе ее на другую уставку. 40 Предлагаемая система не ухудшает качества регулирования на участках времени, когда noiiiexa с выхода датчика обратной связи отсутствует. В этом случае при подходе к точке ста- 45 билизации может произойти смена знака ошибки. Формирователь П импульсов, блок J2 памяти и ключ J3 запирают прохождение импульса ошибки, следящего за изменением знака, в ре- 50 версивный счетчик 7. Но этот импульс в реверсивный счетчик 7 и не должен записываться, так как система уже находится в точке стабилизации (о чем свидетельствует смена знака ошибки). 55 Блок 12 памяти может быть реализован с применением стандартного логи- :ческого элемента, имеющего два устойчивых состояния О и I,
т.е.
на основе RS-, IK- или D-триггера,
ходе первого вычитателя 4 не достига- системе при каждой смене знака ошиб- ки формирователь JJ импульсов форми-
ет нуля, а становится знакопеременной с частотой помехи.
Дпя устранения автоколебаний и повышения точности регулирования в
ходе первого вычитателя 4 не достига системе при каждой смене знака ошиб- ки формирователь JJ импульсов форми-
импульсь ошибки в реверсивный счет- чик 7, т.е. создается режим, соответ ствующий режиму работы системы при
рует импульс,-переводящий в О блок 12 памяти. В этом состоянии ключ 13 закрывается и не пропускает
0 импульсь ошибки в реверсивный счет- чик 7, т.е. создается режим, соответ- ствующий режиму работы системы при
0
35
нулевой ошибке, когда импульсы ошибки не поступают на реверсивный счетчик 7. 5 Для обеспечения возможности перемещения объекта J из этого устойчивого положения, необходимо вывести блок 12 памяти из состояния О и открыть ключ 13 при отсутствии изменения знака ошибки в интервалах времени между импульсами ошибки. Для этого выход преобразователя 6 код - частота соединен с блоком 12 памяти таким образом, чтобы задним фронтом каждого импульса переводил блок 12 памяти в состоя- ние 1.
На фиг.2 начиная с момента времени t2 показаны процессы в системе при переходе ее на другую уставку. 40 Предлагаемая система не ухудшает качества регулирования на участках времени, когда noiiiexa с выхода датчика обратной связи отсутствует. В этом случае при подходе к точке ста- 45 билизации может произойти смена знака ошибки. Формирователь П импульсов, блок J2 памяти и ключ J3 запирают прохождение импульса ошибки, следящего за изменением знака, в ре- 50 версивный счетчик 7. Но этот импульс в реверсивный счетчик 7 и не должен записываться, так как система уже находится в точке стабилизации (о чем свидетельствует смена знака ошибки). 55 Блок 12 памяти может быть реализован с применением стандартного логи- :ческого элемента, имеющего два устойчивых состояния О и I,
т.е.
на основе RS-, IK- или D-триггера,
31366990
В качества примера рассмотрим наибо- Блок 0 установки начальных услолее простой вариант реализации с так-вий по своему функциональному назна- тируемым по фронту D-триггером, имеющим, кроме входа D, вход S - установ-.g ки 1, и тактовьш вход С. В этом случае объединенные входы D и S должны быть подключены к выходу формирователя 1 импульсов, а тактовый выход С к выходу преобразователя 6 код - час- IQвход, соединенный с ключом 13, и ретота. .версивный вход, подключенный к знакоЗадним фронтом импульса ошибки свому выходу первого вычитателя 4. выхода преобразователя 6 код - часто- Импульс с блока JO установки ната блок 12 памяти устанавливается вчальных условий записывает в реверсостояние О (в соответствии с по- 15сивнмй счетчик 7 код, поступающий на
тенциапом на D-входе, фиг.2 ), откры-его информационные входы, т.е. код вая ключ 13 и давая разрешение на за-, полнение реверсивного счетчика 7. Если в промежутке между импульсами
ошибки происходит смена знака ошибки, 20Формула изобретения формирователь 11 импульсов формирует Следящая система по авт.св.
короткий импульс, который переводит№ 1265692 -отличающаяся
блок 12 памяти по входу S в состоя-тем, что, с целью повышения помехоние 1 и закрывает ключ 13. Следую-защищенности системы, в ней дополнищий импульс ошибки в реверсивньй счет-25тельно установлены блок памяти, форчик 7 не записьшается, так как ключ J3мирователь импульсов и ключ, причем
- закрыт, но этот импульс своим заднимвыход преобразователя код - частота
фронтом устанавливает блок 12 памятисоединен с счетным входом реверсивнов состояние О, давая разрешение наго счётчика через ключ, управляющим
прохождение очередного импульса ошиб- 30входом подключенный к выходу блока
j5u,памяти, информационным входом соедиТаким образом, при наличии поме-ненного с выходом преобразователя
хи с выхода преобразователя 9 положа-код - частота, а управляющим входом ние - код в точке стабилизации объек-с выходом формирователя импульсов, та 1 из-за непрерывной смены знака 35 выходом Подключенного к знаковому выощибки ключ 13 постоянно закрыт.ходу первого в ычитателя.
чению представляет собой формирователь короткого импульса который пег ступает на вход записи реверсивного счетчика 7, имеющего информационньш вход (входы )j связанный с дреобразо- вателем 9 положение - код, счетный
фактического положения объекта 1.
Таким образе, значительно повьш1а- ется точность предлагаемой системы.
вий по своему функциональному назна-
чению представляет собой формирователь короткого импульса который пег ступает на вход записи реверсивного счетчика 7, имеющего информационньш вход (входы )j связанный с дреобразо- вателем 9 положение - код, счетный
его информационные входы, т.е. код
фактического положения объекта 1.
Таким образе, значительно повьш1а- ется точность предлагаемой системы.
фиг.
Uoc
f/i
/
flp
FbPbfA in П ПГ
il I il M I
U
ОШ
IL
tftf
1ПГ f
II 111 t
I I i
I t
t
II
фиг. 2
| Следящая система | 1984 |
|
SU1265692A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
