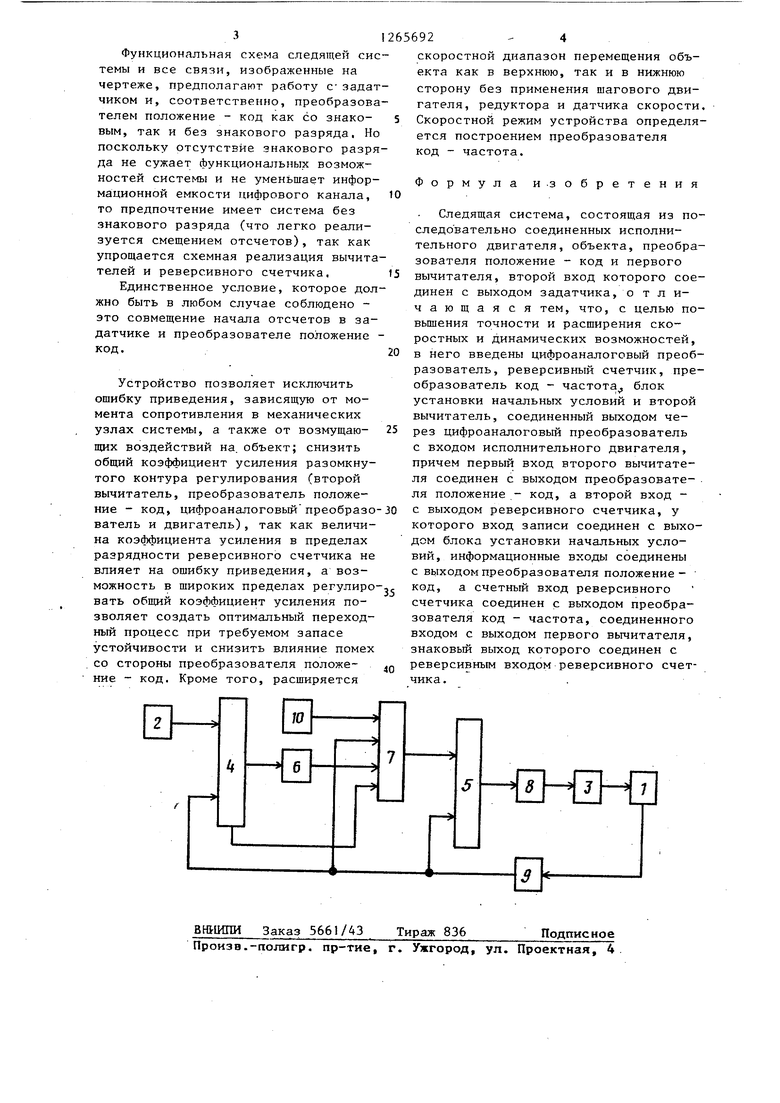
Изобретение относится к автоматн ческому управлению электроприводами и может быть использовано для автоматизации промьшшенных объектов, Цель изобретения - повьшение точности регулирования и расширение скоростных и динамических возможностей системы при перемещении объекта в заданное положение. Большой скоростной диапазон перемещений обеспечивается возможностью изменять в широких пределах коэффициент передачи преобразователя, код .частота и, следовательно, реализовать как сверхнизкие (ползучие), так и высокие скорости перемещения без применения редуктора. Расширение динамических возможностей обеспечивается тем, что в устройстве коэффициент усиления разомкнутой системы не влияет на точность стабилизации положения объекта и, следова тельно, может меняться в широких пре делах для обеспечения оптимальных ди намических параметров регулирования, На чертеже представлена функциональная схема предлагаемой системы. Система состоит из объекта 1 управления, задатчика 2, исполнитель ного двигателя 3, вычитателей 4 и 5, преобразователя код - частота 6, реверсивного счетчика 7, цифроаналогового преобразователя 8, преобразователя положение - код 9 и блока 10 установки начальных условий. Система работает следующим образом. Координаты объекта 1, задаваемые задатчиком 2, в двоичном коде поступают на группу входов первого вычита теля 4, другая группа входов которого соединена с преобразователем 9 по ложение - код. Модуль разности кодов соответствующий ошибке приведения, поступает на преобразователь код частота 6, преобразующего код в импульсы частотой, пропорциональной ошибки. Эти импульсы подаются на счетный вход реверсивного рчетчика 7, который в зависимости от знака ошибки (сигнал переноса вычитателя 4) переводится в режим сложения или вычитания. В начальный момент времени, напри мер, при подаче питания на систему блок 10 установки начальных условий вьщает импульс, который поступает на вход записи реверсивного счетчика 7, и в реверсивный счетчик .7 по информационным входам записывается код текущего положения объекта 1, В этот момент на выходе первого вычитателя 4 имеетсякод ошибки приведения, а на выходе второго вычитателя 5, управляющего через цифроаналоговый преобразователь 8 двигателем 3, появляется нулевой код. В зависимости от знака и величины ощибки приведения реверсивный счетчик 7 начинает заполняться импульсами с преобразователя код - частота, причем эти импульсы либо складываются, либо вычитаются из ранее записанного кода текущего положения объекта. Появившаяся разность на выходе второго вычитателя 5 преобразуется в цифроаналоговом преобразователе 8 в ток двигателя 3. Как только ток двигателя достигает величины, достаточной для преодоления момента сопротивления в механических узлах, начинается движение объекта 1. Устойчивость замкнутого контура регулирования, состоящего из второго вычитателя 5, двигателя 3 и преобразователя 9 положение - код, обеспечивается корректирующими цепями, находящимися в цифроаналоговом преобразователе 8. Скорость перемещения объекта 1 определяется частотой следования импульсов с преобразователя 6 код - частота. При подходе к заданной координате приближается к нулю ошибка приведения (код на выходе первого вычитателя 4) и, соответственно, частота заполнения реверсивного счетчика 7.«Объект 1 плавно без перерегулирования и ошибки устанавливается в заданное положение. В этом положении на выходе второго вычитателя 5 устанавливается такой код и, соответственно, такой ток двигателя, который необходим для удержания объекта 1 в заданном положении. На выходе первого вычитателя в это время нулевой код, соответствующий установке объекта 1 в заданное положение без ошибки, в противном .случае при наличии любого ненулевого кода появляются импульсы на выходе преобразователя 6 код - частота, которые устанавливают в реверсивном счетчике такое число, которое обеспечивает нужную разность на выходе второго Фычитателя 5 дпя установки йбъекта в заданное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1985 |
|
SU1305628A2 |
| Следящая система | 1986 |
|
SU1366990A2 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Цифровая следящая система | 1990 |
|
SU1835533A1 |
| Цифровая следящая система | 1990 |
|
SU1833835A1 |
| Следящая система | 1987 |
|
SU1474586A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1991 |
|
RU2018899C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| Следящий аналого-цифровой преобразователь | 1988 |
|
SU1562972A1 |
Изобретение относится к автоматическому управлению электроприводами и Может быть использовано для автоматизации промьшшенных объектов. Цель изобретения - повьшение точности и расширение скоростных и динамических возможностей следящей системы, С этой целью в схему известной следящей системы введены ЦАП, реверсивный счетчик, преобразователь код - часто-, та, блок установки начальных условий и второй вычислитель. Соединение их с остальными элементами схемы в соответствии с поставленной задачей обеспечивает распшрение динамических возможностей системы за счет того, что в устройстве коэффициент усиления разомкнутой системы не влияет на точность стабилизации положения объекта и, следовательно, может меняться в широких пределах для обеспечения оптимальных динамических параметров ел регулирования. 1 ил.
| Баширин А.В | |||
| и др | |||
| Управление электроприводами | |||
| - Л.: Энергоиздат, 1982, с.200 | |||
| Система управления электроприводомпРОМышлЕННОгО РОбОТА | 1979 |
|
SU830293A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
