входу второго коммутатора, соединенного третьим и. четвертыми входами соответственно с первым выходом первого коммутатора и с третьим выходом блока синхронизации, а пятым входом - с управляющим входом цифроаналогового преобразователя и с выходом первого О -триггера, подключенного С -входом к выходу второго элемента ИЛИ-41Е, связанного входами с выходами второго реверсивного счетчика и с входами цифроаналогового
преобразователя, подключенного выходом к первому входу сумматора, соединенного вторым входом с выходом преобразователя частота-напряжение, а выходом - с информационным входом усилителя мощности, причем суммирующий и вычитающий входы второго реверсивного счетчика подключены соответственно к первому и второму выходам второго коммутатора, а выход преобразователя код-частота - к третьему входу блока синхронизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| Реверсивный цифровой интегратор | 1984 |
|
SU1238030A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Цифровой программный электропривод | 1980 |
|
SU959038A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Электропривод | 1985 |
|
SU1275726A1 |
| Цифровой экстраполирующий преобразователь | 1975 |
|
SU550641A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
ЧИСЛО-ИМПУЛЬСНЫЙ СЖДЯЩИЙ ЭЛЕКТРОПРИВОД, содержащий блок задания программы, подключенный первым выходом к первому входу первого коммутатора, а вторым выходом - к первому входу блока синхронизации, соединенного первым и вторым выходами соответственно с вторым и третьим входами первого коммутатора, подключенного первым и вторым выходами соответственно к суммирующему и вычитающему входам первого реверсивного счетчика, цифроаналоговый преобразователь, электродвигатель, кинематически связанный через редуктор с входом датчика перемещения,а выходом - с входом датчика тока,подключенного выходом через блок ограничения тока к управляющему входу усилителя мощности, подключенного выходом к входу электродвигателя, блок формирования импульсов отработки, соединенный входами с выходами датчика перемещения, а первым и вторым выходами - соответственно с вторым входом блока синхронизации и с четвертым входом первого коммутатора, отличающийся тем, что, с целью повышения точности и расширения области применения электропривода, в него введены второй коммутатор, второй реверсивный счетчик, сумматор, первый и второй элементы ИПИ-НЕ, первый D-триггер, преобразователь код-частота и блок формирования скоростной ошибки, содержащий R6 -триггер, подключенный S - и ( -входами к первым входам соответственно, первого и второго элементов И, прямым выходом - к первому входу элемента ЭКВИВАЛЕНТНОСТЬ и ко второму входу первого элемента И, а инверсивным выходом - к второму входу второго элемен-1 та И, соединенного выходом с первым входом элемента ИЛИ, подключенного вторым входом к выходу первого элемента И, а выходом - к информационно.. му входу преобразователя частота-напряжение и к С -входу второго триггера, связанного выходом с управляющим входом преобразователя частота-на, пряжение, а D -входом - с выходом : элемента ЭКВИВАИЕНТНОСТЬ, подключенно го вторым входом к суммирующему входу первого реверсивного счетчика, соединенного выходами каждого разряда с входами преобразователя код-частота и с входами первого элемента ШШ-НЕ, подключенного выходом к пятому входу первого коммутатора, связанного третьим выходом с первым входом, второго коммутатора, с Б -входом первого D -триггера и 5-входом RS -триггера, подключенного R входом к вычитающему входу первого реверсивного счетчика и к второму
1
Изобретение относится к устройствам автоматического регулирования и может быть использовано в установках с программным управлением (станках с ЧПУ, промышленных манипуляторах, в которых входной сигнал представлен у читарным кодом) .
Известен следящий электропривод, содержащий последовательно соединенные блок задания программы, узел синхронизации, коммутатор, реверсивный счетчик, ЦАП, усилитель мощное-ти, электродвигатель, импульсный датчик обратной связи ij .
Недостатками известного привода являются невысокие точность и быстродействие, так как в нем реализуется пропорциональный закон регулирования положения.
Наиболее близким к предлагаемому является число-импульсный следящий электропривод, содержащий блок задания программы, подключенный первым выходом к nepBobiy входу первого коммутатора, а вторым выходом - к первому входу блока синхронизации, соединенного первым и вторым выходами соответственно с вторым и третьим входами первого . коммутатора, подключенного первым и вторым вькодами соответственно к суммирующему и вычитающему входам первого реверсивного счетчика, цифроаналоговый преобразователь, электродвигатель, кинематически связанный через редуктор с входом датчика перемещения, а выходом - с входом датчика тока, подключенного выходом через блок ограничения тока к управляющему входу усилителя мощности, подключенного выходом к входу электродвигателя, блок формирования импульсов отработки, соединенный входами с выходами датчика перемещения, а первым и вторым выходами - соответственно с вторым входом блока синхронизации и с четвертым входом первого коммутатора И
Недостатком известного привода является невысокая точность регулирования положения при контурном регулировании, так как регулирование производится по ошибке по положению Кроме того, ошибка по положению, накапливаемая реверсивным счетчиком, представляется как в прямом, так и в дополнительном позиционных кодах, что приводит к усложнению схемы при реализации сложных законов регулирования в известной схеме.
Цель изобретения - повышение точности и расширение области применения электропривода.
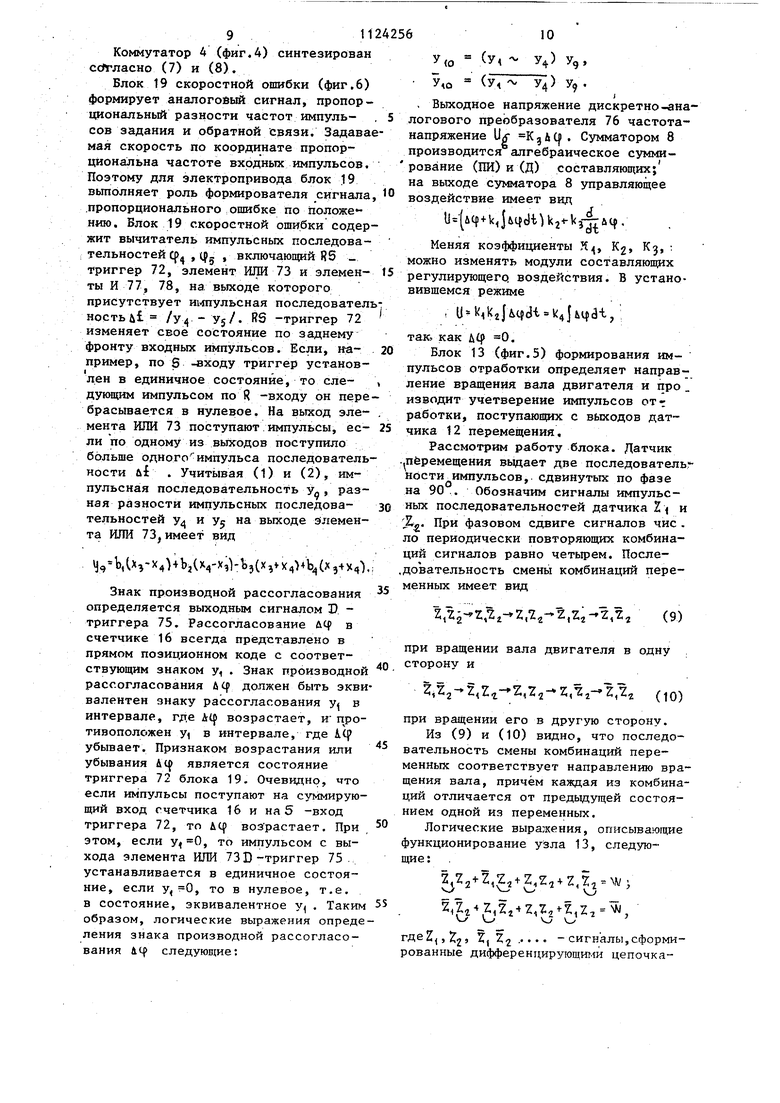
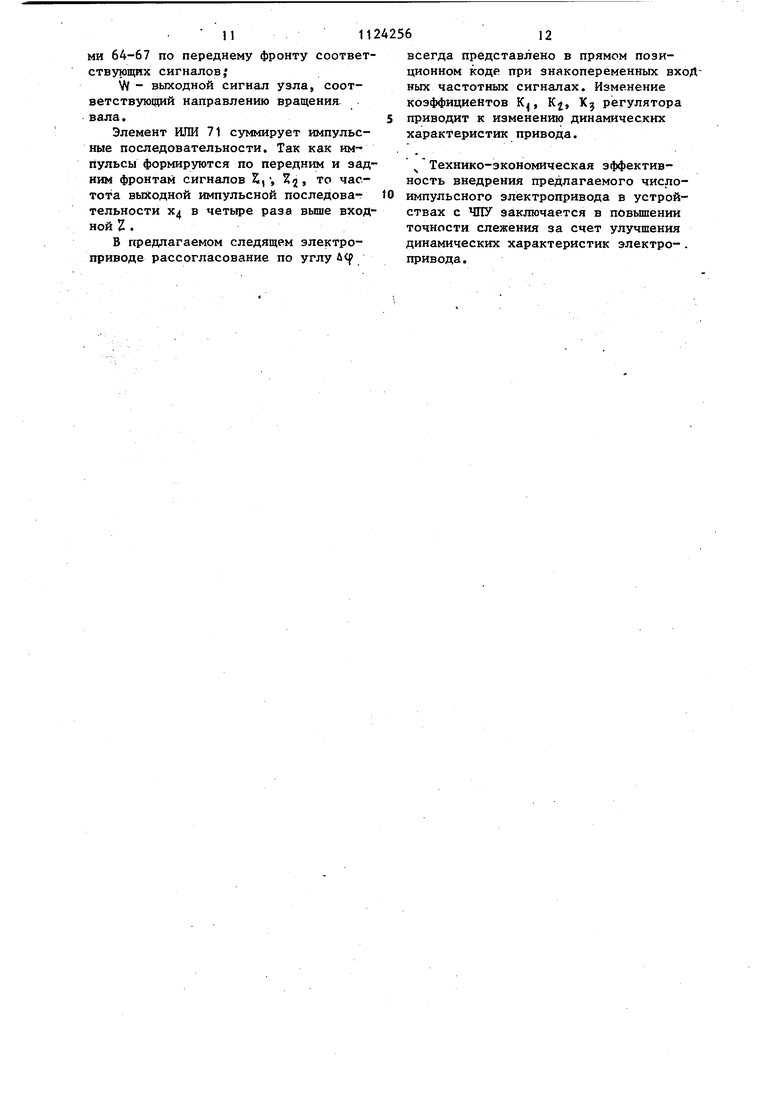
Поставленная цель достигается тем, что в число-импульсный следящий электропривод, содержащий блок задания программы, подключенный первым выходом к первому входу первого коь мутатора, а вторым выходом к первому входу блока синхронизации, соединенного первым и вторым выходами соответственно с вторым и третьим входами первого коммутатора, подключенного первым и вторым выходами соответственно к суммирующему и вычитающему входам первого реверсивного счетчика, цифроаналоговый преобразователь, электродвигатель, кике31магически связанный через редуктор с входом датчика перемещения,а выходом - с входом датчика тока,подключенн го выходом через блок ограничения тока к управляющему входу усилителя мощности, подключенного выходом к входу электродвигателя, блок формирования импульсов отработки, соединенный вхо дами с выходами датчика перемещения а первым и вторым выходами - соответственно с вторым входом блока синхронизации и с четвертым входом первого коммутатора, введены второй коммутатор, второй реверсивный счетчик, сумматор, первый и второй элементы ИЛИ-НЕ,первый D -триггер, пре образователь код-частота и блок фор мирования скоростной ошибки, содержа щий -триггер, подключенный S и ft-входами к первым входам соответственно первого и второго элементов И, прямым выходом - к первому . входу элемента ЭКВИВАЛЕНТНОСТЬ и к второму входу первого элемента И, а инверсным выходом - к второму входу второго элемента И, соединенного выходом с первым входом элемента ИЛИ, подключенного вторым входом к выходу первого элемента И, а выходом - к информационному входу преобразователя частота-напряжение и к С -входу второго D -триггера, свя занного выходом с управляющим входом преобразователя частота-напряжение, а D -входом - с выходом элемен та ЭКВИВАЛЕНТНОСТЬ,подключенного вторым входом к суммирующему входу первого реверсивного счетчика, соединенного вьгх:одс1ми каждого разря да с входами преобразователя кодчастота и с входами первого элемента ИПИ-НЕ, подключенного выходом к пятому входу первого коммутатора, связанного третьим выходом с первым вхрдом второгокоммутатора, с В -вх дом первого)-триггера и с S-входом RS-триггера, подключенного R -входом к вычитающему .входу первого реверсивного счетчика и к второму вхо ду второго коммутатора, соединенного третьим и четвертым входами соответственно с первым выходом первого коммутатора и с третьим выходом блока синхронизации, а пятым входом - с управляющим входом цифроаналогового преобразователя и выходом первого) -триггера, подключенного С -входом к выходу второго элемента Т-ШИ-НЕ, связанного вхо64дами с выходами второго резерсивного счетчика и с выходами цифроаналогового преобразователя, подключенного выходом к первому входу сумматора, соединенного вторым входом с выходом преобразователя частота-напряжение, а выходом - с информационным входом усилителя мощности, причем суммирующий и вычитающий входы второго реверсивного счетчика подключены соответственно к первому и второму выходам второго коммутатора, а выход преобразователя код-частота - к третьему входу блока синхрониз ации. На фиг, 1 приведена структурная схема предлагаемого следящего электропривода; на фиг. 2 - функциональная схема блока синхронизации; на фиг. 3 - функциональная схема первого коммутатора, на фиг, 4 функциональная схема второго коммутатора{ на фиг. 5 - функциональная схема блока формирования импульсов отработки; на фиг. 6 - функциональпая схема блока скоростной ошибки. Следящий электропривод (фиг,1) содержит блок 1 задания программы, блок 2 синхронизации, первый коммутатор 3, второй коммутатор 4, второй реверсивный счетчик 5, второй элемент КЧИ-НЕ 6, цифроаналоговый преобразователь 7, сумматор 8, усилитель 9 мощности, электродвигатель 10, редуктор 11, датчик 12 перемещения, блок 13 формирования импульсов отрз-ботки, датчик 14 тока, блок 15 ограничения тока, первый реверсивный счетчик 16, первый элемент ИЛИ-НЕ 17, преобразователь 18 кодчастота (ПКЧ), блок 19 формирования скоростной ошибки, первый Д5 -грщ- гер 20, первый и второй выходы 21 и 22 блока задания программы, третий и второй входы 23 и 24 блока синхронизации, пятый, второй и третий входы 25, 26 и 27 первого коммутатора, третий 28 выход блока синхро-. низации, четвертый 29 вход первого коммутатора, третий, второй первый и пятый вход;ы 30, 31, 32 и 33 второго коммутатора, первый и второй выходы 34 и 35 второго коммутатора, выход 36 блока формирования скоростной ошибки, выходы 37 и 38 датчика перемещения, Блоксинхронизации (фиг.2) содерямт вторые R5--триггеры 39-41 , третьи элементы И 42-44,генератор 45 импульсов к распределитель 46 импульсов .
$ 1
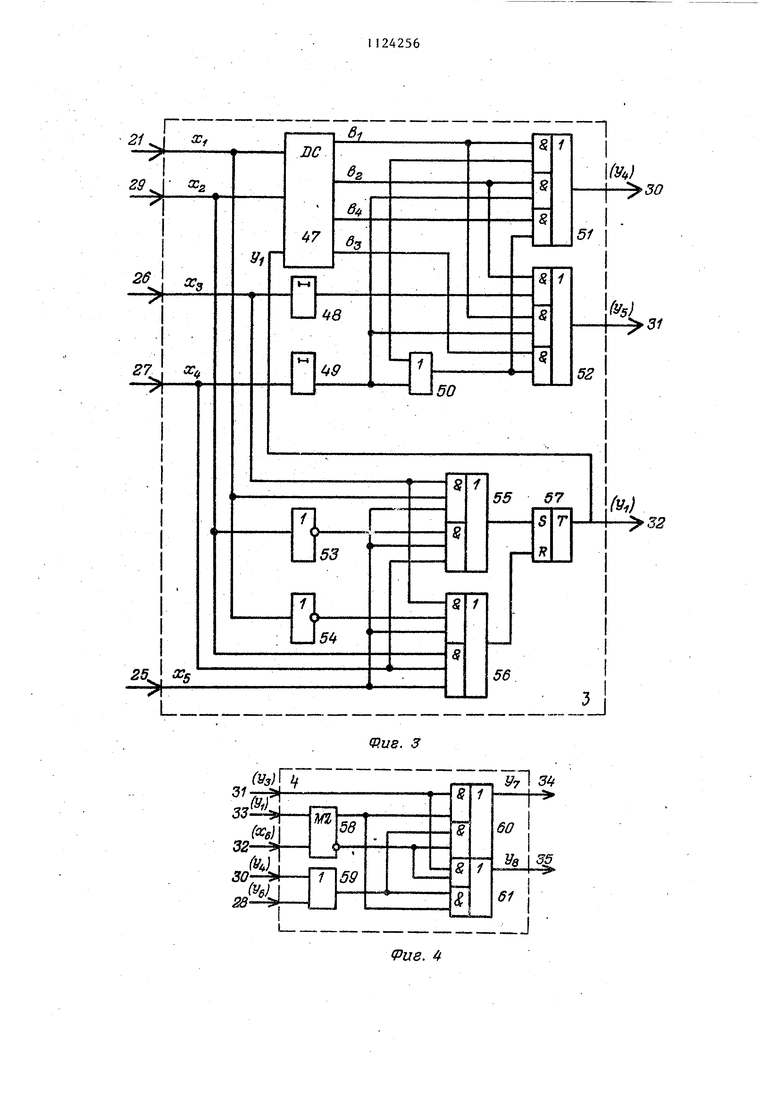
Первый коммутатор (фиг.3) содержит дешифратор 47, элементы 48 и 49 задержки, второй элемент ИЛИ 50, первые элементы И-ИЛИ 51 и 52, узел знака ошибки, включаюш,ий первые элементы НЕ 53 и 54, вторые элементы И-ИЛИ 55 и 56 и третий -триг - гер 57.
Второй коммутатор (фиг.4), содержит второй сумматор 58 mod 2 с инверсией, третий элемент ИЛИ 59, третьи элементы И-Ш1И 60 и 61.
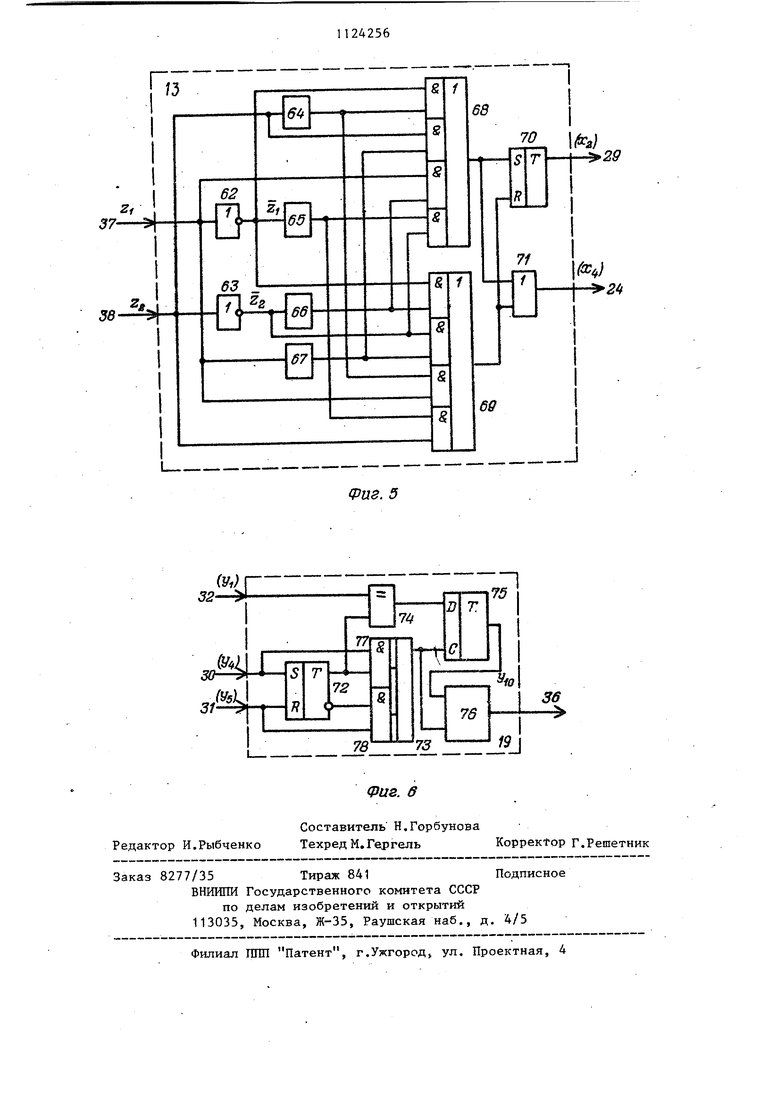
Блок 13 формирования импульсов от работки и знака направления вращения (фиг.5) содержит вторые элементы НЕ 62, 63, дифференцирующие звенья 64 - 67, четвертые элементы И-ЙЛЙ 68 и 69, триггер 70 памяти направления вращения, третий элемент ИЖ 7t.
Блок 19 скоростной ошибки (фиг.6) содержит -триггер 72, элементы ИЛИ 73, ЭКВИВАЛЕНТНОСТЬ 74, второйВ-триггер 75, преобразователь 76 частота-напряжение, первый и второй элементы И 77, 78.
Следящий электропривод работает следующим образом.
С блока 1 задания программы сиг нал задания угла поворота вала двигателя (исполнительного органа) по выходу 22 представлен унитарным кодом, частота импульсов которого пропорциональна скорости вращения вала дригателя а количество импульсов Р дискретах равно углу поворота вала. Знак кода (направление вращения выходного вала) подается по выходу 21. Блок 2 синхронизации исключает одновременное появление импульсов на его выходах при совпадении их во времени на его входах, чтобы исключить возможность неправильной работы реверсивных счетчиков. Блок обеспечивает наличие обязательного временного интервала между выходными импульсами, равного периоду тактового генератора 45. Триггеры 39-41 устанавливают в единичное состояние по переднему фронту входных импульсов. Элементы И 42-44 открываются последовательно и на их выходах появляются импульсы, разделенные на период следования импульсов генераторя 45. Распределитель 46 последовательно комйутирует вторые входы элементов И, при появлении импуль42566
сов на вь«ходах которых связанные с ними триггеры устанавливаются в нулевое состояние. ,
5 Для правильного функционирования привода рассогласование по углу Atf, накапливаемое реверсивным счет чиком 16, должно быть всегда представлено в прямом позиционном коде 10 (модуль рассогласования) с совтветствующим знаком.
Введем следующие обозначения двоичных переменных:
Xj - знак сигнала задания 15 х - знак сигнала обратной связи; х - сигнал задания,Х4 - сигнал обратной связи; Хс - сигнал элемента выявления . нулевого состояния счетчика 16 (эле20 мента ИЖ-НЕ 17).
Режим работы реверсивного счетчика (суммирование или вычитание импульсов) определяется знаками импульсных последовательностей задания и об25 .ратной связи, а также знаком рассогласования i(j . Число различных комбинаций двоичных переменных х , -х., у N 2 8. Логические вьфажения, определяющие состояния переменных, 30 следующие;
d,x,X2y, , .,y, , , ,X2y,
dy.X,X2y, , ,X2y, .
Из множества состояний переменных de{d, ....dgl попарно эквивалентны следующие состояния:, d. -v da , , ЧЦ - dg, ,d dj-, которые соответствуют всем возможным режимам работы счетчика 16 при знакопеременных входных частотных сигналах.
Рассмотрим режимы работы счетчика 16, определяемые состоянием переменных X. , х , у :
1) b,.jy + х,х,у, суммирование импульсов задания х и вычитание импульсов обратной связи х .
Режим Ь, соответствует процессу движения исполнительного органа к заданной точке;
2) bj , + , суммирование импульсов обратной связи х и вьиитание импульсов задания х .
Режим Ь2 возникает при прохождении исполнительным органом заданной точки (перерегулирование по положению) , x. -.3 I читание импульсов Xj и x. Режим bi возникает при изменении знака сигнала задания, если в момент изменения знака Х| привод находился в состоянии 1 ; ) x,x,jy + с1, +Яб суммирование импульсов задания х и обратной связи Х4 . Режим Ьь возникает при изменении знака сигнала х, если в момент изменения знака Xj привод находился в состоянии }} . На основании рассмотренных возмож ных состояний привода логическое выражение для режима суммирования ре версивным счетчиком импульсов зада ния Х- имеет вид lji«y,+c))4, (1) соответственно щгя режима суммирования импульсов обратной связи к 1) + 5 + Зв)4- 2) Из (1) и (2) получим )4 )2 }5 l l4- b 3- 4)- (3) Аналогично составляем логическое вьфажениё для режима вычитания реверсивным счетчиком импульсов х- и х в виде , + х). (4) Так как ошибка по положению Д(|) должна быть всегда представлена в прямом позиционном коде, то необходимо определять и запоминать знак оши(бки, который соответствует положе нию исполнительного органа относител но заданной точки. Если в момент обнуления реверсивиого счетчика (Atf 0, ХЕ 1) первым поступает импуль задания х-, то знак ошибки у эквивалентен знаку сигнала задания (у .Xj), а если импульс обратной связи х, то обратен знаку, сигнала обратной связи (). Логические выражения, описывающие функционирование узла определения знака ошибки, следуюпр1е: у, Xj(x,x, + ). УГ ii Коммутатор 3 синтеризрован соглас но логическим выражениям (3) - (6). Введение интеграла от ошибки по положению Дц является методом создания или повышения порядка аста118 тизмз привода, а значит, и увеличения его точности. Для получения интегральной составляющем регулирующего воздействия от i(p в системе управления приводом используется преобразователь код-частота (ПКЧ) 18, который осуществляет преобразование ошибки по положению Дер в пропорцио.: нальную ей импульсную последовательность. Реверсивным счетчиком 5 про . изводится накопление ПИ - составляющей регулирующего воздействия в виде U i(f + К, . ПКЧ 18 может быть выполнен на базе накапливающего сумматора, осуществляющего интегрирование с заданной тактовой частотой кода &(р с выделением сигнала переполнения, частота повторения которого является выходной последовательностью. ПКЧ реализует следующую функцию: У6 К,.4(у, при ЛСр i S , где - коэффициент преобразования}и - входная частота, Гц, S - числовой объем сумматора. Изменяя коэффициент преобразования К ПКЧ 18 можно изменять модуль интегральной составляющей регулирующего воздействия. В установившемся режиме рассогласование йСр 0, поэтому 1 К, JbCf di , т.е. происходит компенсация всех ошибок. Рассмотрим работу коммутатора 4, управляющего работой счетчика 5. Обозначим знак содержимого счетчика 5 переменной Xg с памятью, им пульсный сигнал преобразователя 18 код-частота - yg, сигнал элемента ЮШ-НЕ 6 выявления нулевого состояния счетчика 5 - х. Логические выражения для определения знака содержимого счетчика 5 имеют вид х .f у,,- Xg Xj.y, . Режим работы t счетчика 5 определяется состоянием знаком х. и у . Число различных комбинаций переменных х и .у, равно четырем. Однако -v , -- ,, поэтому если , то в счетчике 5 производится суммирование импульсов последовательсти у с дер , а если Xg y , то вычитание. Логические выражения работы коммутатора следующие: )У4+Уб) + (Усхб)у.г, (7) () 8) 911 Коммутатор 4 (фиг.4) синтезирован ссЛгласно (7) и (8). Блок 19 скоростной ошибки (фиг.6) формирует аналоговый сигнал, пропорциональный разности частот импульсов задания и обратной срязи. Задава мая скорость по координате пропорциональна частоте входных импульсов. Поэтому для электропривода блок .19 вьтолняет роль формирователя сигнала .пропорционального ошибке по положа нию. Блок 19 скоростной ошибки содер жит вычитатель импульсных последовательностей ср , ср- , включающий R5 триггер 72, элемент ИЛИ 73 и элементы И 77, 78, на. выходе которого присутствует т пульсная последовател ность й /У4 У5/ -триггер 72 изменяет свое состояние по заднему фронту входных импульсов. Если, капример, по S -входу триггер установлен в единичное состояние, то еледукицим импульсом по R -входу он пере брасывается в нулевое. На выход элемента ИЛИ 73 поступают импульсы, еели по одному из выходов поступило больше одного импульса последователь ности ui . Учитывая (1) и (2), импульсная последовательность УО, разная разности импульсных последовательностей у и yj на выходе элемента ИЛИ 73,имеет вид Ч9 КиЭ- 4 Ц(Х4-з1-Ьз(Х,() Знак производной рассогласования определяется выходным сигналом Р триггера 75. Рассогласование uf в счетчике 16 всегда представлено в прямом позиционном коде с соответствующим знаком у, . Знак производной рассогласования А ср должен быть экви валентен знаку рассогласования у в интервале, где Atp возрастает, if противоположен у, в интервале, где i(J убывает. Признаком возрастания или убывания Aif является состояние триггера 72 блока 19. Очевидно, что если импульсы поступают на суммирующий вход счетчика 16 и на 5 -вход триггера 72, то ACf возрастает. При этом, если , то импульсом с выхода элемента ИЛИ 73D -триггер 75 устанавливается в единичное состояние, если у, О, то в нулевое, т.е. в состояние, эквивалентное у . Таким образом, логические выражения опреде ления знака производной рассогласования АЦ следующие: У,о (уч Л У4 9 , Выходное напряжение дискретно-аналогового преобразователя 76 частотанапряжение Urf- К J Л Gi . Сумматором 8 производится алгебраическое суммирование (пи)и (Д) составляющих; на выходе сумматора 8 управляющее воздействие имеет вид (f+ k HdiU2 3lI Меняя коэффициенты К, К2, Kj,: можно изменять модули составляющих регулирующего воздействия. В установившемся режиме , U-k4k2|H }t X4|b4 t, так, как Д0 0, Блок 13 (фиг.5) формирования импульсов отработки определяет направление вращения вала двигателя и про изводит учетверение импульсов отработки, поступаюицпс с выходов датчика 12 перемещения, Рассмотрим работу блока. Датчик .перемещения вьщает две последователь ности импульсов, сдвинутых по фазе на 90 . Обозначим сигналы импульсных последовательностей датчика Z и ;Z. При фазовом сдвиге сигналов чис . ло периодически повторяющих комбинаций сигналов равно четырем. Последовательность смены комбинаций переменных имеет вид Z, 2,72-2,2. при вращении вала двигателя в одну сторону и ,,,,-,2 (10) при вращении его в другую сторону. Из (9) и (10) видно, что последовательность смены комбинаций переменных соответствует направлению вращения вала, причём каждая из комбинаций отличается от предьщущей состоянием одной из переменных. Логические выражения, описывающие функционирование узла 13, следующие:,Z,tZ,Z,+ Z,Z, NVj Z,,Z,4Z,Z2tZ,Z, NW, w о о где2, ,2 Z, 2 - сигналы, сформированные дифференцирующи1.{и цепочка 11112 ми 64-67 по переднему фронту соответ ствующих сигналов, V/ - выходной сигнал узла, соответствующий направлению вращения вала. Элемент ИЛИ 71 суммирует импульсные последовательности. Так как импульсы формируются по передним и задним фронтам сигналов X,, Z, то частота выходной импульсной последовательности Х4 в четьфе раза выше входной Z . В предлагаемом следящем электроприводе рассогласование по углу 6 всегда представлено в прямом позиционном коде при знакопеременных входных частотных сигналах. Изменение коэффициентов К, Kj, Xj регулятора приводит к изменению динамических характеристик привода. Технико-экономическая эффективность внедрения предлагаемого числоимпульсного электропривода в устройствах с ЧПУ заключается в повьшении точности слежения за счет улучшения динамических характеристик электро- . привода.
L.
.и :
Фиб. 2
L.
..и
. 3
PU8. 4
ФиЗ. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4215300, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Управление электроприводами | |||
| Сб | |||
| под ред | |||
| Вашарина и др | |||
| Л., Энергоиздат, 1982,,с | |||
| Гудок | 1921 |
|
SU255A1 |
