1
Изобретение относится к автоматическому управлению электропривода,ми и является усовершенствованием следящей системы по авт. св. № 1265692.
Цель изобретения повышение поме хозашищенности и надежности следящей системы.
На чертеже представлена блок-схема системы.
Система содержит объект I регулирования, задатчик 2, исполнительный двигатель 3, первый 4 и второй 5 вы- читатели,преобразователь 6 код - частота, реверсиВ|Ный счетчик 7, цифро- аналоговый преобразователь 8, преобразователь 9 положение - код, блок 10 установки начальных условий, дешифратор 11 .
Система работает следующим образом.
Координаты объекта .1, задаваемые задатчиком 2 в двоичном коде, поступают на группу входов первого вычи- тателя 4, другая группа входов которого соединена с преобразователем 9 положение - код. Модуль разности кодов, соответствзтощий ошибке приведения, поступает на npeo6pa3OBaTeJEb 6 код - частота,преобр азующий код в импульсы частотой, пропорцинальной ошибке. Эти импульсы подаются на счетный вход реверсивного счетчика 7 который в зависимости от знака ошибки (сигнал переноса вычитателя 3) переводится в режим сложения или вычитания.
В начальный момент времени при подаче питания на систему блок 10 установки начальных условий выдает им- пульс, который поступает на вход записи реверсивного счетчика 7, ив реверсивный счетчик 7 по информацион- ньм входам записывается код текущего положения объекта 1. В этот момент на выходе первого вычитателя 4 будет код ошибки приведения, а на выходе второго вычитателя 5, управляющего через цифроаналоговый преобразователь 8 двигателем 3, появится нулевой код. В зависимости от знака и величины ошибки приведения реверсивный счетчик 7 начинает заполняться импульсами с преобразователя код - частот., причем эти импульсы либо скЛадьшаются, либо вьиитаются из ранее записанного кода текущего положения объекта. Появившаяся разность на выходе второго вы читателя 5 преобразуется в цифроана
to
,
20
40, .
3056282
логовом преобразователем 8 в аналоговый сигнал, ток двигателя 3,
Как только ток двигателя достигает величины, достаточной для преодоления момента сопротивления в механических узлах, начинается движение объекта 1, Устойчивость замкнутого контура регулирования, состоящего из второго вычитателя 5, двигателя 3 и преобразователя 9 положение - код, обеспечивается корректирующими цепями, находящимися в цифроаналого- вом преобразователе 8. Скорость перемещения объекта 1 определяется частотой следования импульсов с преобразователя 6 код - частота. При подходе к заданной координате приближается к нулю ошибка приведения (код на выходе первого вычитателя 4) и, соответственно, частота заполнения реверсивного счетчика 7. Объект 1 плавно без перерегулирования и ошибки устанавливается в заданное положение... В это время при движении и стабилизации заданного положения объекта дешифратор 11 не оказывает влияния на работу системы. Однако при случайном сбое реверсивного счетчика, когда на выходе второго вычитателя появляется большой код разности, превышающей заданное число, дешифратор 11 вырабатьшает сигнал, поступающий на блок 10 установки начальных условий, В блоке 10 формируется импульс записи кода текущего положения объекта в реверсивный счетчик 7, т.е. происходит стирание сбойной информации и перевод системы в начальный режим работы, описанный вьш1е для момента подачи питания на систему.
25
30
35
В этот момент возможно кратковременное отклонение объекта регулирова- иия от точки стабилизации на угол, пропорциональный упругому моменту, действующему на объект, на величину отклонения и время возвращаения объекта- можно свести к допустимому минимуму, наложив определенные требования на коэффициенты передачи элемента разомкнутой системы, и,кроме того, при моментах сухого трения, превьшзаю- .щих упругие моменты, при любых сбоях реверсивного счетчика отклонения объекта от точки стабилизации не будут вообще зафиксированы.
Число, при котором дешифратор выдает сигнал на перевод системы в на
3I
чальный режим работы, может определяться из различных условий, например из условиях ограничения предельно допустимого момента, развиваемого двигателем, или предельно допустимых скоростей перемещения объекта регулирования, или, например, если система имеет зону насьщения в тракте прямой передачи системы сигнала, из условия обеспечения работы системы в линейной области. Все зависит от конкретных задач, параметров и ограничений, накладьгеаемых на систему.
Если под действием внешних возмущающих моментов, превьшающих момент двигателя, объект регулирования отклоняется от точки стабилизации и на выходе второго вычитателя появляется код разности более допустимого, дешифратор также переводит систему в
Редактор В. Петраш
Составитель С. Никищов
Техред Л.Сердюкова Корректор А. Обручар
Заказ 1426/44 . Тираж 864Подписное
ВИНИЛИ Государственного комитета СССР
по делам изобретений и открытий 1.13035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
3056284
начальный режим работы и при снятии возмущающего воздействия момента объект регулирования движется в заданное положение со скоростью, опреде- 5 ляемой передаточной характеристикой преобразования 6 код - частота, т.е. без превьшения предельно допустимых режимов работы, в связи с чем повышается помехозащищенность и надеж 0 ность Следящей системы.
Формула изобретения
Следящая система по авт. св. № 1265692, отличающаяся тем, что, с целью повышения надежности и помехозащищенности, в нее введен дешифратор, выход которого соединен с блоком установки начальных условий, а вход - с выходом второго вычитателя .
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1986 |
|
SU1366990A2 |
| Следящая система | 1984 |
|
SU1265692A1 |
| Следящая система | 1987 |
|
SU1474586A1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| Адаптивная следящая система | 1984 |
|
SU1288651A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Дискретный электропривод | 1978 |
|
SU911456A1 |
Изобретение касается автоматического управления электроприводами. Цель изобретения - повьшение помехозащищенности и надежности следящей системы. Высокая помехозащищенность и надежность обеспечиваются введением в известную систему дополнительного дешифратора 11, играющего роль по- рового устройства для стирания сбойной информации и перевода системы в начальный режим работы. 1 ил. ы о сд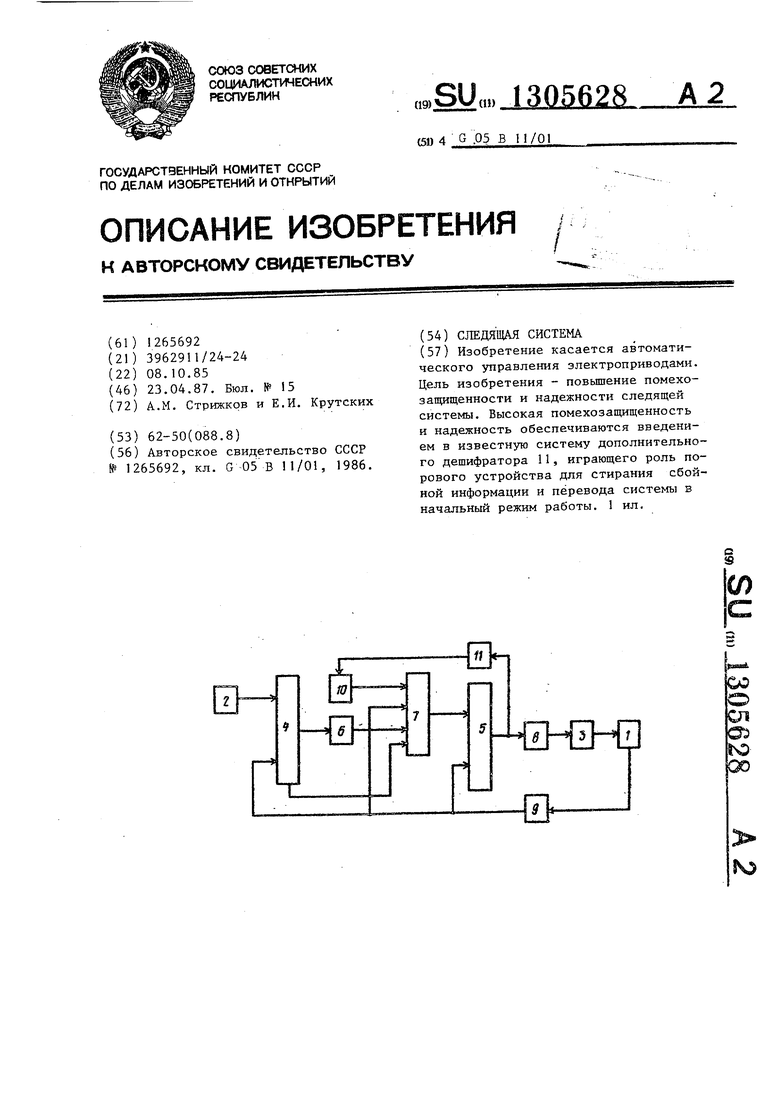
| Следящая система | 1984 |
|
SU1265692A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
