00
а
00
х ел
1
Изобретение относится к производству пневматических шин, а именно к диагонально-резательным машинам для раскроя обрезиненного кордного полотна, и может быть использовано в цехах химической и легкой промьшглен- ности при изготовлении ковровых изделий и пластмасс.
Целью изобретения является повьшхе ние-экономичности путем использовани энергии скольжения линейного асинхронного двигателя.
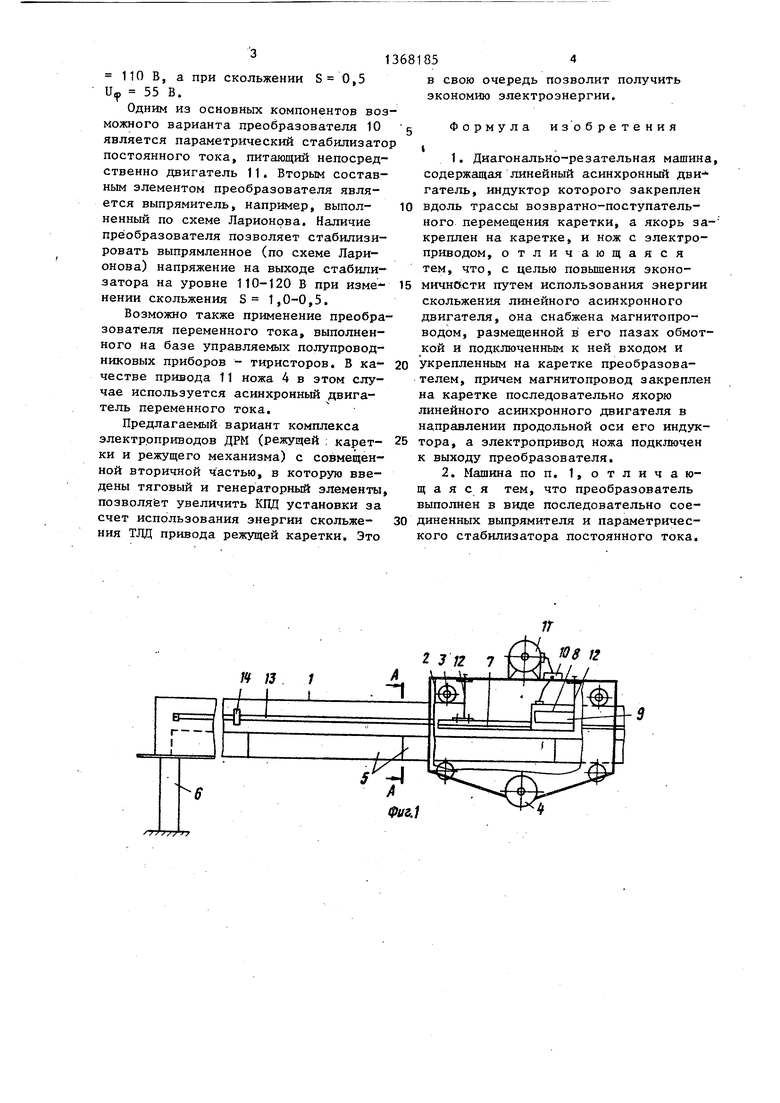
.На фиг. 1 представлена диагонально-резательная машина, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Диагонально-резательная машина (ДРМ) содержит направляющую балку 1 с установленной на ней с возможность перемещения вдоль нее режущей карет- кой 2, несущей закрепленный на ней вал 3 и нож 4. Тяговый линейный электродвигатель (ТЛД) для перемещения каретки 2 состоит из первичной части (индуктора) - единичных блоков 5, расположенных вдоль всего пути перемещения режущей каретки 2 и закрепленных на стойках 6. Вторичная часть (якорь) 7 жестко укреплена на. каретке 2 и выполнена в виде реактивной .полосы. Машина содержит также магнитопровод 8 с размещенной в его пазах обмоткой 9. Магнитопровод 8 закреплен на каретке 2 последовательно якорю 7 в направлении продольной оси дндуктора. Расстояние между маг- нитопроводом 8 и блоками 5 выбрано с расчетом обеспечения их электромагнитного взаимодействия.
Обмотка 9 через закрепленный на каретке 2 преобразователь 10 подключена к электродвигателю 11 ножа 4.
Регулируемый воздушный зазор межд первичной и вторичной частями поддер
живается в пределах 4-5 мм при помощи 45 постоянного тока связано с тем, что
регулировочных винтов 12. Количество единичных блоков 5 определяется длиной направляющей балки 1 (длина единичного блока равна порядка 1,0 м). На штанге 13 вдоль направляющей балки 1 установлены датчики 14 для обеспечения автоматической работы привода в функции пути. Для управления работой ТЛД испэльзуется, например, ти- ристорная станция управления типа ТСУ-162-В1УЗ (не показана). Наличие датчиков 14 обеспечивает поочередное включение и отключение первичных блоков 5 в функции пути, что сущест5,0
55
в процессе перемещения каретки 2 с закрепленной на ней вторичной часть ЭДС, индуктируемая в обмотке 9, из- меняется в функции скольжения S.. Это вызывает необходимость стабилиза ции величины напряжения, подаваемого на двигатель 11, что легче выполнить с помощью преобразовательного устройства постоянного тока. Так, например, при пуске каретки 2 скольжени у ее двигателя S 1, а фазное напря жение, измеренное на входе преобразователя 10, при физическом моделиро вании привода 11 составляет
венно снижает расход электроэнергии . в процессе работы машины.
Для аварийного останова в противоположных концах балки установлены пружинные амортизаторы (не показаны).
Машина работает следующим образом.
Рассмотрим работу режущей каретки 2 в случае установки вдоль пути перемещения трех единичных блоков 5 . (фиг. 1). Рез кордного полотна осуществляется как при движении режущей каретки вперед, так и назад (двусторонний рез) .
После окончания отмера кордного по- лотна подается команда Пуск в станцию ТСУ на включение первого единичного блока 5, под которым расположена режущая каретка 2. Взаимодействие бегущего магнитного поля, возбуждаемого индуктором ТЛД, с реактивной полосой 7 обеспечивает перемещение .каретки 2 вдоль балки 1 с тяговым усилием порядка 100-200 Н. Одновре- менно индуктируется ЭДС в обмотке 9 и через преобразовательное устройство 10 осуществляет питание бесконтактным способом электродвигателя 11
ножа 4.
I .
По мере перемещения каретки 2 станция управления с помощью датчиков 11 поочередно включает и отключает питание единичных первичных блоков 5 линейного двигателя. Последний
блок 5 включается на режим электрического торможения и каретка 2 останавливается, питание на двигатель 11 ножа также прекраща1гтся после отключения блока. Аналогичный цикл происходит при движении каретки в обратную сторону.
В варианте с использованием в прИ воде ножа 4 двигателя 11 постоянного тока применение преобразователя 10
в процессе перемещения каретки 2 с закрепленной на ней вторичной часть ЭДС, индуктируемая в обмотке 9, из- меняется в функции скольжения S.. Это вызывает необходимость стабилизации величины напряжения, подаваемого на двигатель 11, что легче выполнить с помощью преобразовательного устройства постоянного тока. Так, например, при пуске каретки 2 скольжение у ее двигателя S 1, а фазное напряжение, измеренное на входе преобразователя 10, при физическом моделировании привода 11 составляет
110 в, а при скольжении S 0,5 и,р 55 В.
Одним из основньпс компонентов возможного варианта преобразователя 10 является параметрический стабилизато постоянного тока, питающий непосредственно двигатель 11. Вторым составным элементом преобразователя является выпрямитель, например, выполненный по схеме Ларионова. Наличие преобразователя позволяет стабилизировать выпрямленное (по схеме Ларионова) напряжение на выходе стабилизатора на уровне 110-120 В при изменении скольжения S 1,0-0,5.
Возможно также применение преобразователя переменного тока, выполненного на базе управляемых полупроводниковых приборов - тиристоров, В качестве привода 11 ножа 4 в этом случае используется асинхронный двигатель переменного тока.
Предлагаемый вариант комплекса электроприводов ДРМ (режущей : карет- ки и режущего механизма) с совмещенной вторичной частью, в которую введены тяговый и генераторный элементы позволяет увеличить КПД установки за счет использования энергии скольжения ТДЦ привода режущей каретки. Это
13681854
в свою очередь позволит получить
0
5
экономию электроэнергии.
Формула изобретения
I
1. Диагонально-резательная машина,
содержащая линейный асинхронный дви- гатель, индуктор которого закреплен вдоль трассы возвратно-поступательного перемещения каретки, а якорь за- креплен на каретке, и нож с электроприводом, отличающаяся тем, что, с целью повышения эконо5 мичнОсти путем использования энергии скольжения линейного асинхронного двигателя, она снабжена магнитопро- водом, размещенной в его пазах обмоткой и подключенным к ней входом и укрепленным на каретке преобразователем, причем магнитопровод закреплен на каретке последовательно якорю линейного асинхронного двигателя в направлении продольной оси его индуктора, а электропривод ножа подключен к выходу преобразователя.
2. Машина по п. 1,отличаю- щ а я с я тем, что преобразователь выполнен в виде последовательно сое0 диненных выпрямителя и параметрического стабилизатора постоянного тока.
0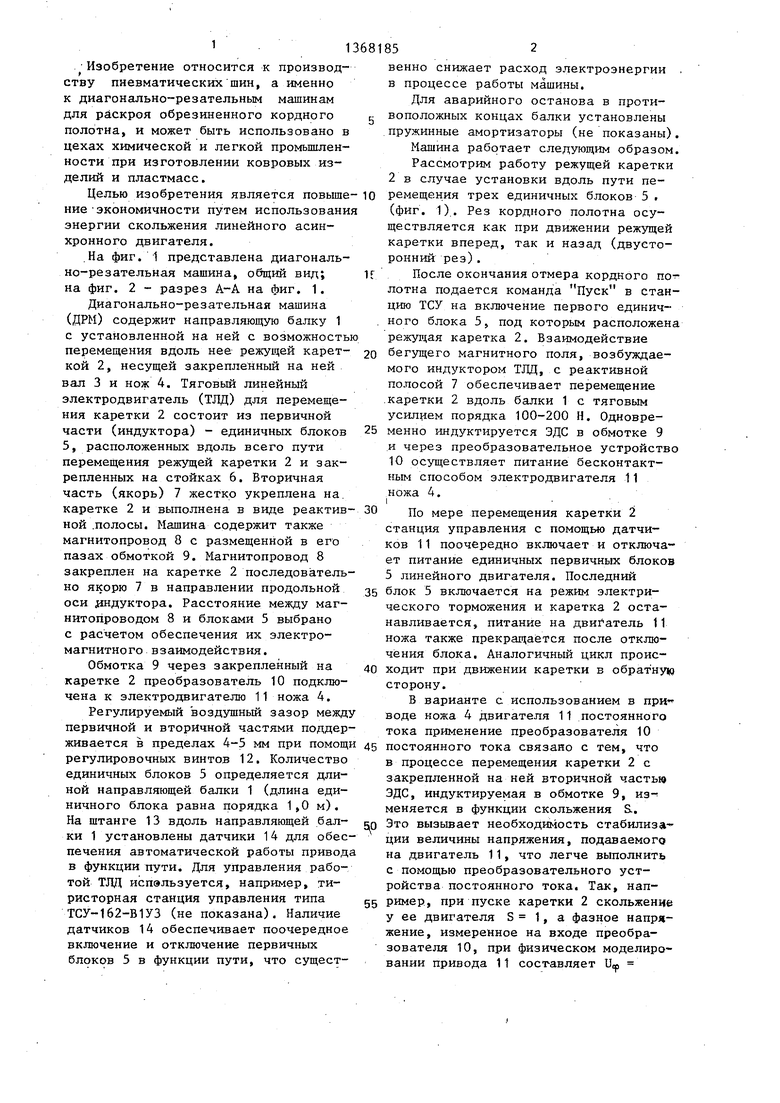
| название | год | авторы | номер документа |
|---|---|---|---|
| Диагонально-резательная машина для раскроя кордного полотна | 1983 |
|
SU1207783A1 |
| Диагонально-резательная машина для раскроя кордного полотна | 1980 |
|
SU903196A1 |
| Диагонально-резательная машина | 1984 |
|
SU1214476A1 |
| Устройство для перекладки полосового кордного материала | 1987 |
|
SU1475817A1 |
| Манипулятор и способ управления им | 1990 |
|
SU1782720A1 |
| Устройство для вращения буровой колонны | 1982 |
|
SU1071737A1 |
| АСИНХРОННАЯ РЕГУЛИРУЕМАЯ МАШИНА | 2008 |
|
RU2380813C1 |
| Диагонально-резательная машина | 1986 |
|
SU1348215A1 |
| Линейный индукционный двигатель | 1982 |
|
SU1117789A1 |
| Устройство для перекладки резино-кордного материала | 1981 |
|
SU1028529A1 |

Изобретение, относится к средствам раскроя длинномерных материалов , Целью изобретения является повышение экономичности путем использования энергии скольжения линейного асинхронного двигателя. Перемещение каретки с дисковым ножом осуществляется тяговым линейным двигателем (ТЛД), индуктор которого неподвижно закреплен вдоль трассы перемещения каретки. На каретке установлен генератор (Г), состоящий из плоского магнитопровода с обмоткой, в котором при перемещении каретки наводится ЭДС вследствие электромагнитного взаимодействия индуктора ТЛД и обмотки Г. Выработанное напряжение через преобразователь подается на электропривод дискового ножа. Преобразова тель может быть выполнен в виде выпрямителя и параметрического стабилизатора постоянного тока, соединенных последовательно. 1 з.п. ф-лы, 2 ил. (Л
А-А
f1
Фиг. г
| Диагонально-резательная машина для раскроя кордного полотна | 1983 |
|
SU1207783A1 |
| Солесос | 1922 |
|
SU29A1 |
