сл
с
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА С ВНЕШНЕЙ ФОРСИРОВКОЙ | 2019 |
|
RU2723989C1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1282302A1 |
| Частотно-регулируемый асинхронный электропривод | 1982 |
|
SU1099373A1 |
| СИСТЕМА ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2010 |
|
RU2470454C2 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1829102A1 |
| Частотно-регулируемый асинхронный электропривод для испытательного стенда двигателей | 1984 |
|
SU1203682A1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |
| ЭЛЕКТРОПРИВОД ТИРИСТОРНЫЙ АСИНХРОННЫЙ | 1995 |
|
RU2101847C1 |
Использование. В манипуляторах для автоматизации транспортировки деталей. Сущность изобретения: для питания электромагнита 6 захвата деталей используется ток обмотки 3, размещенной на подвижном вторичном элементе 2 линейного асинхронного двигателя. Для включения, удержания и отключения электромагнита 3 регулируют частоту и напряжение тока обмотки индуктора линейного асинхронного двигателя. 2 с. и 1 з.п. ф-лы, 7 ил.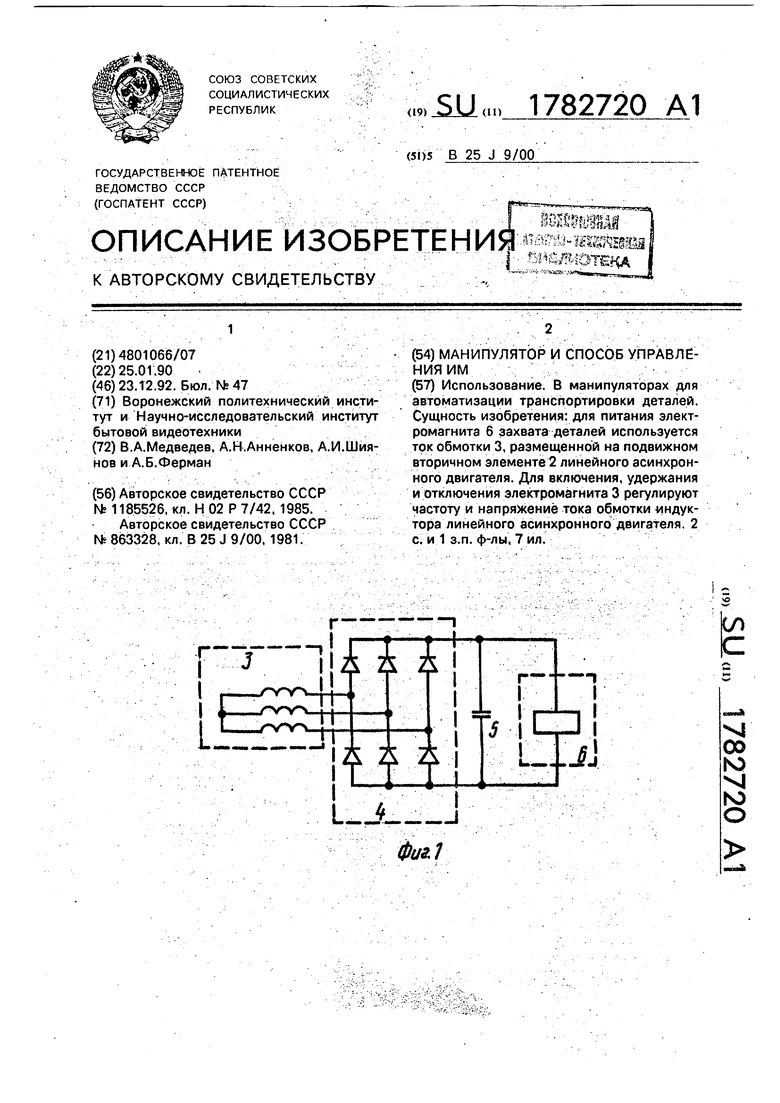
.JJ
XI
00 ND х|
|ЧЭ
о
Фиг.1
Изобретение относится к электротехнике, в частности, к регулируемому электроприводу переменного тока и может быть использовано для автоматизации вспомогательных операций при штамповке, сборке, механической обработке, сварке и т.д.
Известен манипулятор, содержащий линейный асинхронный двигатель с индуктором с обмоткой переменного тока, подвижный вторичный элемент и захват, размещенный на вторичном элементе.
Недостатком известного технического решения является необходимость введения гибкой связи или осуществления иных контактов между системой управления и захватом, расположенным на подвижной части манипулятора.
Целью изобретения является повышение надежности манипулятора.
В предлагаемом манипуляторе указанная цель достигается тем, что вторичный элемент снабжен обмоткой и введены электромагнит, закрепленный на захвате, мостовой выпрямитель, выводы переменного тока которого подключены к обмотке вторичного элемента, а выводы постоянного тока - к обмотке электромагнита, и конденсатор, шунтирующий обмотку электромагнита.
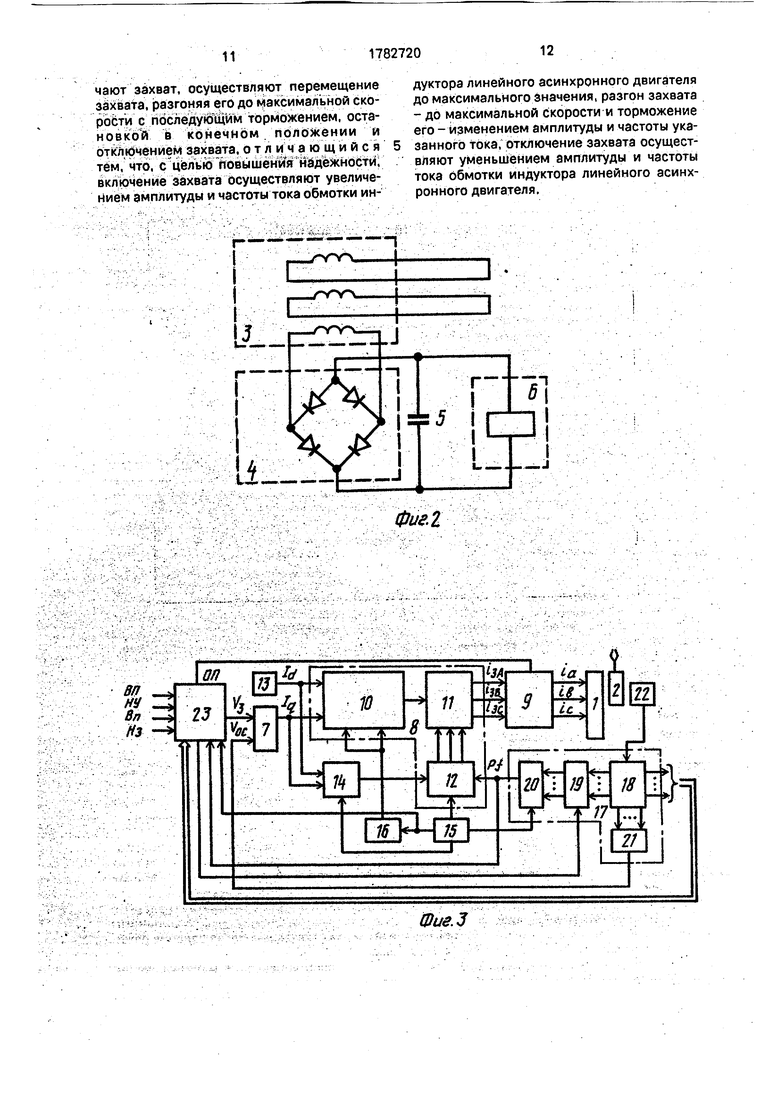
Известен способ управления манипулятором, при котором фиксируют начальное положение и конечное положение вторич,- ного элемента, включают захват, осуществляют перемещение захвата, разгоняя его до максимальной скорости с последующим торможением, остановкой в конечном положении и отключением захвата.
Недостатком этого технического решения является отсутствие возможности бесконтактного управления захватом, размещенным на подвижной части манипулятора.
Целью изобретения является повышение надежности манипулятора.
В предлагаемом способе управления манипулятором указанная цель достигается тем, что включение захвата осуществляют увеличением амплитуды и частоты тока обмотки индуктора линейного двигателя до максимального значения, разгон захвата до максимальной скорости и торможение его - изменением амплитуды и частоты указанного тока, а отключение захвата осуществляют уменьшением амплитуды и частоты тока обмотки индуктора линейного двигателя.
Предлагаемый способ реализован в устройстве для управления манипулятором.
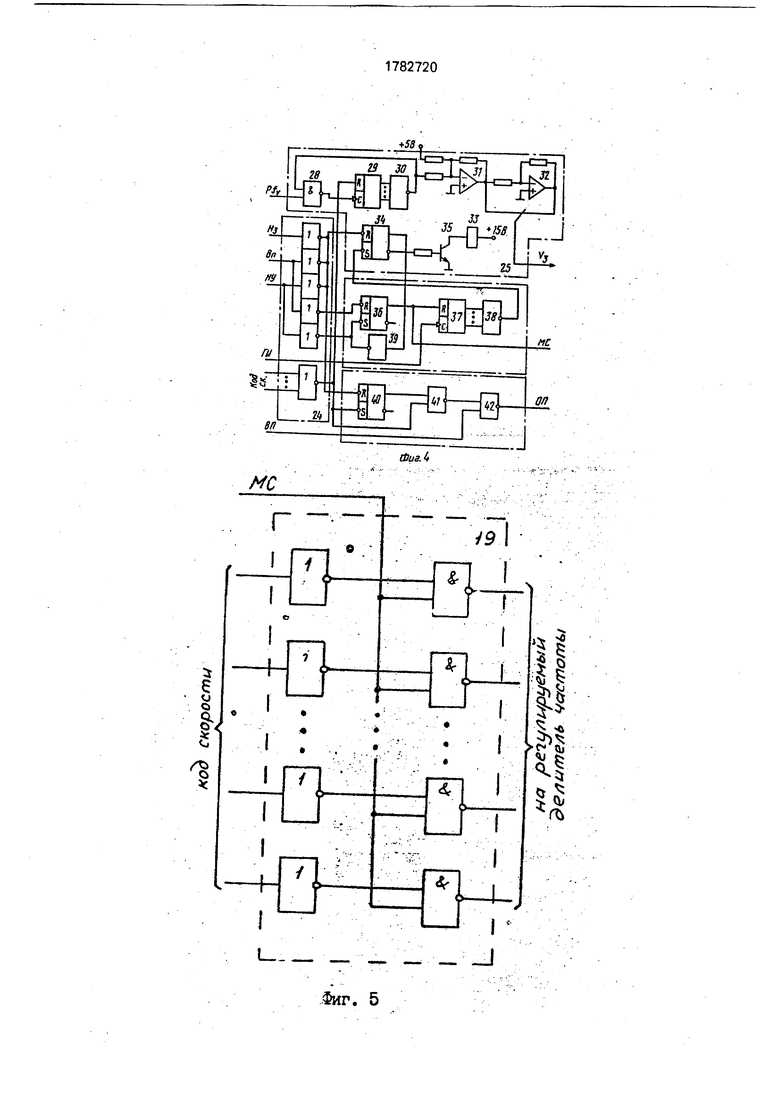
На фиг.1,2 представлены варианты подключения электромагнита захвата к обмотке вторичного элемента; на фиг.З - функциональная схема устройства для управления манипулятором; на фиг.4 - принципиальная схема блока задания режимов работы; на фиг.5 - принципиальная схема формирователя кода скорости, на фиг.6 компановочная схема манипулятора; на фиг.7 - диаграмма работы отдельных узлов устройства для управления манипулятором. Манипулятор содержит индуктор 1 линейного асинхронного двигателя с вторич0 ным элементом 2, обмотка 3 которого соединена через мостовой выпрямитель 4, на выходе которого включен конденсатор 5, с электромагнитом 6 захвата, расположенным на вторичном элементе 2,
5 Устройство для управления манипулятором содержит следующие основные элементы. Регулятор 7 скорости, преобразователь 8 координат и преобразователь 9 энергии последовательно соединены между собой. Пре0 образователь 8 координат включает последовательно соединенные между собой первый координатный преобразователь 10 и второй координатный преобразователь 11, а также формирователь 12 опорных сиг5 налов второго координатного преобразователя 11.
Выход преобразователя 9 энергии подключен к обмотке индуктора 1, Выход задат- чика 13 реактивного тока подключен к
0 соответствующему входу первого координатного преобразователя 10 и первому входу формирователя 14 частоты токов вторичного элемента 2, второй вход которого связан с выходом регулятора 7 скорости.
5 Выход формирователя 14 соединен с первым входом формирователя 12, со вторым входом которого соединен первый выход генератора 15 опорных сигналов. Второй выход генератора 15 соединен с
0 входом формирователя 16 синусоидальных сигналов, выходы которого подключены ко входам первого координатного преобразователя 10.
Умножитель 17 частоты включает после5 довательно соединенные формирователь 18 приращений перемещения, формирователь 19 кода скорости, выполненный на элементах логики, и регулируемый делитель 20 частоты, а также преобразователь 21 кода в
0 аналоговый сигнал, связанный с выходом формирователя 18.
Выход датчика 22 перемещения подключен ко входу формирователя 18 Третий выход генератора 15 связан ссоответствую5 щим входом регулируемого делителя 20, выход которого связан с третьим входом формирователя 12, Выход преобразователя 21 связан со входом регулятора 7 Четвертый выход генератора 15 связан с третьим входом формирователя 14.
Блок 23 задания режимов работы содержит дешифратор 24, построенный на логических элементах, входы которого соединены с соответствующими выходами программного устройства манипулятора (не показано) и выходом формирователя 18. Выходы дешифратора подключены к соответствующим входам задатчика 25 скорости, формирователя 26 сигнала максимального скольжения и формирователя 27 сигнала отключения преобразователя. Выход задатчика 25 соединен со входом регулятора 7. Выход формирователя 26 соединен со входом формирователя 19, вы- ходформирователя 27 подключен ксоответ- ствующему входу преобразователя 9. Управляющий вход задатчика 25 соединен с выходом регулируемого делителя 20. Управляющий вход формирователя 26 связан с первым выходом генератора 15. Управляю- щий вход формирователя 27 соединен с соответствующим выходом программного устройства.
Задатчик 25 и формирователи 26,27 состоят из следующих основных элементов.
Задатчик 25 содержит последовательно соединенные логический элемент 28, счетчик 29 импульсов перемещения, логический элемент 30, а также операционный усилитель 31 и инвертор 32, выходы которых под- ключены к контактам реле 33, и триггер 34, выход которого подключен к базе транзистора 35, в коллекторную цель которого включена катушка реле 33.
Формирователь 26 содержит последо- вательно соединенные триггер 36, счетчик 37 и логический элемент 38, выход которого подключен ко входу установки триггера 34 в единичное состояние, а также инвертор 39, вход которого соединен с прямым выходом триггера 34, а выход подключен ко входу установки триггера 36 в единичное состояние.
Формирователь 27 содержит последовательное соединенные триггер 40 и логиче- ские элементы 41,42.
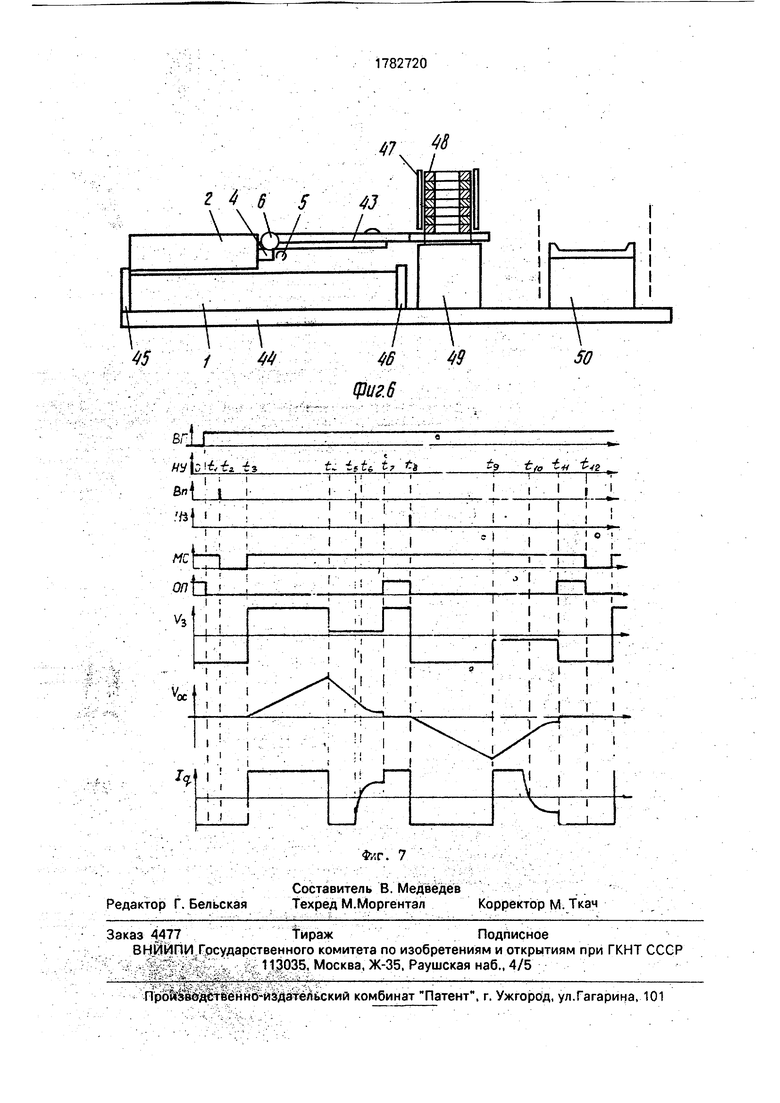
Захват 43 манипулятора смонтирован на вторичном элементе 2. На основании 44 закреплены; индуктор 1, ограничители 45 и 46 хода вторичного элемента 2, кассета 47 для размещения стопы деталей 48, столик
49для размещения нижней детали 48 перед ее транспортировкой в рабочую зону и столик
50для приема деталей в рабочей зоне.
Способ управления манипулятором ре- ализуется в устройстве для управления манипулятором следующим образом.
Перед началом работы манипулятора вторичный элемент 2 находится в крайнем левом положении.
Сигнал включения привода (В П) имеет уровень логического нуля, при этом сигнал отключения преобразователи (ОП) установлен на уровне логической единицы и преобразователь 9 энергии отключен.
При отключенном преобразователе 9 токи в обмотке индуктора 1 и вторичного элемента 2 отсутствуют, электромагнит 6 отключен. Захват 43 разжат, например, под действием силы упругости пружины. В кассету 47 загружаются детали 48, при этом нижняя деталь 48 размещается на поверхности столика 49.
Вторичный элемент 2 неподвижен. Во всех разрядах формирователя 18 установлены логические нули.
Сигнал Voc обратной связи по скорости на выходе преобразователя 21 имеет нулевую величину. Счетчик 29 установлен в нулевое положение, на выходе логического элемента 30 установлен высокий уровень, на выходах операционного усилителя 31 и инвертора 32 максимальное напряжения.
В момент времени t 0 по импульсному сигналу начальной установки (НУ) триггеры 34 и 40 устанавливаются в нулевое состояние, сигнал максимального скольжения (МС) на прямом выходе триггера 36 устанавливается на уровне логической единицы. Формирователь 19 пропускает нулевой код с выхода формирователя 18 на вход делителя 20, частота f pfv на выходе делителя 20 равна нулю.
Транзистор 35 открыт, реле 33 включено, на вход регулятора 7 поступает сигнал Уз задания скорости, имеющий отрицательную полярность и максимальную величину. Соответственно, на выходе регулятора 7 устанавливается сигнал Iq задания активного тока отрицательной полярности и максимальной величины (соответствующий уставке ограничения сигнала lq).
На выходе преобразователя 8 координат устанавливается трехфазная система сигналов 1зд, 1зв, зс задания токов индуктора 1 с максимальной амплитудой с
((ld)2 И чаСТОТОЙ fcKmax, COOTB6Tствующей максимальному по величине сигналу lq.
В момент времени 11 сигнал ВП принимает единичное значение, сигнал ОП устанавливается на уровне логического нуля, включается преобразователь 9 и в обмотке индуктора 1 формируются токи ia, ь, 1с заданной амплитуды и частоты. Вторичный элемент 2 начинает взаимодействовать с ограничителем 45.
Таким образом, фиксируется начальное положение вторичного элемента 2.
В момент времени t2 по импульсному сигналу Вр триггер 36 переводится из единичного в нулевое состояние. По нулевому сигналу МС блокируется прохождение сигнала с выхода формирователя 18 и на входе регулируемого делителя 20 устанавливается максимальный код В обмотках индуктора 1 формируются токи максимальной амплитуды и частоты, линейный асинхронный двигатель работает в режиме максимального скольжения. При этом в фазах обмотки 3 вторичного элемента 2 индуктируются ЭДС, вызывающие протекание токов, достаточных для срабатывания электромагнита б, что обеспечивает захват нижней детали 48 из стопы Вторичный элемент 2 продолжает взаимодействовать с ограничителем 45.
Таким образом, включается захват 43 при максимальных значениях амплитуды и частоты тока обмотки индуктора 1 линейного двигателя и фиксированном начальном положении вторичного элемента 2.
Счетчик 37 начинает счет числа импульсов, поступающих с генератора 15. За период времени , необходимый для захвата детали 48, на всех выходах счетчика 37, связанных со входами логического эШмента 38. появляются единичные сигналы. По нулевому сигналу с выхода логического элемента 38 триггер 34 переводится в еди,- ничное положение, на прямом выходе триггера 36 появляется единичный сигнал и двигатель выходит из режима максимального скольжения, счетчик 37 сбрасывается, на выходе логического элемента 38 появляется единичный сигнал
Закрывается транзистор 35 по нулевому сигналу с инверсного выхода триггера 34, реле 33 отключается, и на вход регулятора 7 поступает сигнал Уз максимальной величины и положительной полярности. Вторичный элемент 2 разгоняется с максимальным ускорением в соответствии со способом частотно-токового управления, при этом в обмотке индуктора 1 формируется ток с максимальной амплитудой и частотой, изменяющейся ПО закону fc fcicmax + pfv.
По мере разгона вторичного элемента 2 разность сигналов Уз и V0c уменьшается. При выходе на максимальную скорость регулятор 7 выходит из состояния ограничения сигнала lq. Привод входит в режим стабилизации скорости, при котором ток в обмотке индуктора 1 соответствует усилию сопротивления движению вторичного элемента 2.
Таким образом, осуществляется перемещение захвата 43, разгоняя его до максимальной скорости, изменением частоты и амплитуды тока обмотки индуктора 1.
При движении вторичного элемента 2, когда хотя бы в одном разряде формирователя 18 появляется единичный сигнал, на прямом выходе триггера 40 появляется единичный сигнал. Счетчик 29 начинает счет числа импульсов перемещения, поступающих с выхода делителя 20 через логический
0 элемент 28.
В момент времени t4, когда вторичный элемент 2 переместится на определенное расстояние, на seek выходах счетчика 29, связанных с логическим элементом 30, по5 является уровень логической единицы, а на выходе логического элемента 30 - уровень логического нуля Прохождение импульсов перемещения на вход счетчика 29 прекращается. С выхода инвертора 32 на вход ре0 гулятора 7 поступает минимальное напряжение. Двигатель тормозится в режиме рекуперативного торможения с максимальным ускорением, при этом частота тока в обмотке индуктора определяется выраже5 НИеМ fc -fcKmax+pfv.
По мере търмбжения вторичного элемента 2 разность сигналов Уз и У0с умень- шается Регулятор 7 выходит из состояния ограничения сигнала lq с момента времени
0 ts Двигатель выходит на установочную скорость, работая с момента времени te в двигательном режиме Процесс торможения сопровождается переходом тока вторичного элемента 2 через ноль. В этот промежуток
5 времени катушка электромагнита 6 получает питание от конденсатора 5.
Таким образом, осуществляется торможение захвата 43 изменением частоты и амплитуды тока обмотки индуктора 1
0 В момент времени t вторичный элемент 2 упирается й 6граничитель46 Счетчик 29 сбрасывается в исходное положение, в результате чего на вход регулятора 7 поступает сигнал Уз максимальной величины.
5 Таким образом, захват 43 останавливается и фиксируется в конечном положении На обоих входах логического элемента 41 единичные сигналы, в результате чего сигнал ОП принимает единичное значение и
0 преобразователь 9 отключается Токи в обмотке 3 уменьшаются до нуля. Конденсатор 5 разряжается и электромагнит 6 отключается. Захват 43 разжимается и деталь 48 попадает на столик 50.
5 Таким образом, осуществляется отключение захвата 43 уменьшением амплитуды тока обмотки индуктора 1 линейного двигателя.
В момент времени ts по импульсному сигналу Нз триггеры 34 и 40 переводятся в
нулевое состояние, открываются транзистор 35, включается реле 33 и на вход регулятора 7 поступает сигнал Va максимальной величины и отрицательной полярности. Одновременно сигнал ОП принимает нулевое значение и включается преобразователь 9. Вторичный элемент 2 разгоняется в обратном направлении с максимальным ускорением.
При движении вторичного элемента 2 на прямом выходе триггера 40 появляется единичный сигнал, а счетчик 29 начинает счет импульсов перемещения.
К моменту времени tg вторичный элемент 2 перемещается на определенное расстояние, после чего на вход регулятора 7 поступает сигнал Va минимальной величины. Двигатель переходит в режим рекуперативного торможения, и с момента времени tio работает в двигательном режиме.
Таким образом, осуществляется пе- рем0щение захвата 43 в обратном направлении, разгоняя его до макбимальной скорости с последующим торможением изменением амплитуды и частоты тока обмотки индуктора 1.
В момент времени tn вторичный элемент 2 упирается в ограничитель 46. На вход регулятора 7 поступает максимальное напряжение. Преобразователь 9 отключается по единичному сигналу ОП.
Таким образом, осуществляется остановка захвата 43.
В момент времени ti2 по сигналу Вп триггеры 36 и 40 переводятся в нулевое состояние. Включается преобразователь 9, двигатель работает в режиме максимального скольжения. С этого момента начинается новый цикл работы устройства, реализующего предложенный способ управления манипулятором.
Предлагаемое техническое решение обеспечивает повышение надежности рабо- ты манипулятора за счет отсутствия необходимости введения гибкой связи или осуществления иных контактов системой управления и электромагнитом захвата, расположенного на подвижной части.
Эффективность использования предлагаемого технического решения обуславливается повышением производительности манипулятора за счет повышения надежности его работы.
Формула изобретения
вторичный элемент снабжен обмоткой, введены электромагнит, закрепленный на захвате, мостовой выпрямитель, выводы переменного тока которого подключены к 5 обмотке вторичного элемента, а выводы постоянного тока к обмотке электромагнита, и конденсатор, шунтирующий обмотку электромагнита.
0 2. Манипулятор по п. 1, о т л и ч а ю щ и- й с я тем, что, с целью повышения производительности, в него введены система управления статорной обмоткой линейного асинхронного двигателя, составленная из
5 последовательно соединенных первого и второго преобразователей координат с опорными входами, и преобразователя энергии, выходом подключенного к статорной обмотке линейного асинхронного дви0 гателя, задатчика активного тока, регулятора скорости с в ходами задания скорости и обратной связи по скорости, выходы которого соединены с входами первого преобразователя координат, формирователя
5 частоты токов обмотки вторичного элемента, входом подключенного к выходам задатчика активного тока и регулятора скорости, формирователей опорных сигналов с тремя входами и синусоидального сигнала и гене0 ратора опорных сигналов, выходы которого соединены с первым, входом формирователя опорных сигналов и входом формирователя синусоидальных сигналов, выходы которых подключены к опорным входам
5 преобразователей координат, второй вход формирователя опорных сигналов соединен с выходом формирователя частоты токов, и введены блок задания режимов работы с входами для подключения к внешнему уст0 ройству, входами задания кода скорости, опорным входом, входим задания перемещения и выходом отключёниЭГи мИксималь- ного скольжения, датчик перемещений, механически связанный с вторичным эле5 ментом, и цифоовой формирователь приращения перемещения, входы которого подключены к выходам Датчика перемещений, генератора опорных сигналов и выходу максимального скольжения блока задания
0 режимов, а выходы - к входу обратной связи регулятора скорости и входу задания кода скорости блока задания режима, выход которого подключен к входу задания скорости регулятора, а преобразователь энергии
5 снабжен входом отключения, соединенным с выходом отключения блока задания режимов.
Вп
из
дуктора линейного асинхронного двигателя до максимального значения, разгон захвата - до максимальной скорости и торможение его - изменением амплитуды и частоты указанного тока, отключение захвата осуществляют уменьшением амплитуды и частоты тока обмотки индуктора линейного асинхронного двигателя.
. i
фиг
Фие.З
Г
оглгш
| Способ управления моментом асинхронной машины | 1964 |
|
SU1185526A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Манипулятор | 1980 |
|
SU863328A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
