(Л
00 а
00
ел
со со
я
hHHen с механизмом свободного хода (мех). Ступица 6 нажимного диска (НД) 3 установлена в корпусе 4 сцепления на телах качения (ТК) 5. Разме цены ТК 5 в винтовых канавках 7. МСХ эбразован обоймой 11, ТК 15 и конической поверхностью 16 ступицы 6. 1ри запитывании электромагнита 8 fiKopb 10 через МСХ передает усилие зажима на НД 3. Усилие нажима увеличивается за счет перемещения НД 3 на ГК 5 в винтовых канавках 7. МСХ обес печивает возможность углового переме цения ступицы 6 относительно обоймы
68533
11 при передаче усилия от якоря 10 к НД 3. При обратном направлении передачи усилия МСХ заблокирован. При износе фрикционных накладок и за счет их податливости в осевом направлении зазор 8 перекрывается. В результате динамического процесса включения сцепления деформация фрикционных накладок достигает максимума. За счет упругости накладки восстанавливают свои размеры. При этом НД 3 вместе со ступицей 6, МСХ и якорем 10 перемещается вдоль оси, а зазор 8 восстанавливается. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханическое сцепление | 1988 |
|
SU1606772A1 |
| Фрикционное устройство | 1989 |
|
SU1707346A1 |
| ФРИКЦИОННАЯ МУФТА СЦЕПЛЕНИЯ | 1971 |
|
SU419652A1 |
| ФРИКЦИОННЫЙ ДИСК | 2008 |
|
RU2379559C1 |
| Фрикционная обгонная муфта | 1990 |
|
SU1783188A1 |
| МУФТА-ТОРМОЗ | 1987 |
|
RU2032118C1 |
| Привод кругловязальной машины | 1979 |
|
SU821575A1 |
| ФРИКЦИОННАЯ МУФТА СЦЕПЛЕНИЯ | 1993 |
|
RU2091622C1 |
| Сцепление | 1986 |
|
SU1386770A1 |
| ДВУХПОТОЧНАЯ МУФТА СЦЕПЛЕНИЯ | 2007 |
|
RU2357125C1 |
Изобретение относится к транспортному машиностроению, а именно к фрикционным сцеплениям с электромагнитным управлением. Цель изобретения - улучшение эксплуатационных качеств путем автоматического регулирования рабочих зазоров. Сцепление содержит электромагнит 8 привода сцепления. Якорь 10 электромагнита 8 сое
1
Изобретение относится к машино- :троению, преимущественно транспорт- 10ГО, и предназначено для соединения ;оосно расположенных валов.
Целью изобретения является улучшение эксплуатационных качеств сцепле- яия путем автоматического регулирования рабочих -зазоров в процессе экс- шуатации.
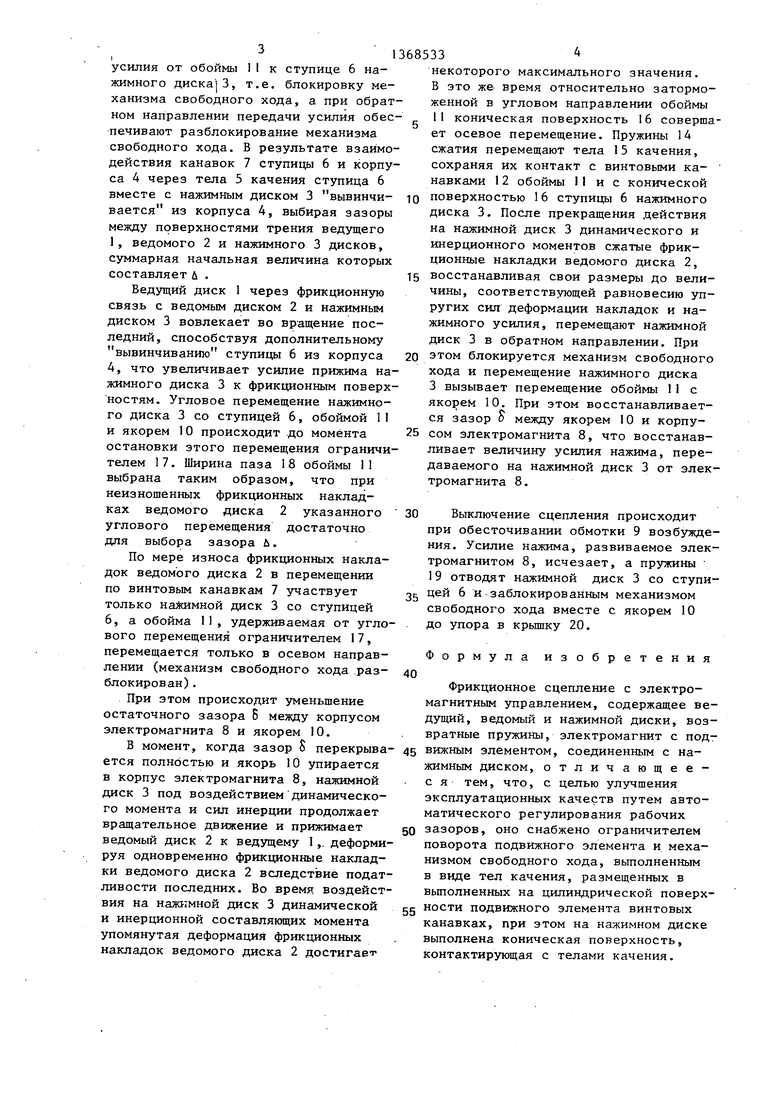
На чертеже изображено фрикционное сцепление во включенном состоянии, общий вид.
Фрикционное сцепление с электро- 1агнитиым управлением содержит ведущий 1, ведомый 2 и нажимной 3 диски. |С ведущим диском 3 жестко соединен |корпус 4, в котором посредством тел
5качения установлена ступица 6 на- жимного диска 3, жестко связанная с :последним. Тела 5 качения расположе- :ны равномерно по окружности ступицы
6в винтовых канавках 7, направление хода которых соответствует направлению вращения ведущего диска 1. Винтовые канавки 7 выполнены на сопрягае- ;мых цилиндрических поверхностях корпуса 4 и ступицы 6 нажимного диска
диска 3 при отключении сцепления осуществляется пружинами 19, а ограничение его хода - упором якоря IО в крышку 20, жестко закрепленную на корпусе электромагнита 8. На ступице
крышки 20 установлены токоподводящие кольца 21, соединенные с обмоткой 9 электромагнита.
Фрикционное сцепление с электромагнитным управлением работает следующим образом.
При запитывании обмотки 9 возбуждения якорь 10 притягивается к корпусу электромагнита 8. Это усилие через обойму 11, тела 15 качения передается на коническую поверхность 16 ступицы 6 нажимного диска 3. Угол конуса конической поверхности 16 выбран таким, что силы трения в местах контакта тел 15 качения с винтовыми канавками 12 и конической поверхностью 16 обеспечивают заклинивание тел 15 качения при передаче осевого
3 1
усилия от обоймы 11 к ступице 6 нажимного диска 3, т.е. блокировку механизма свободного хода, а при обрат ном направлении передачи усилия обес печивают разблокирование механизма свободного хода. В результате взаимодействия канавок 7 ступицы 6 и корпуса 4 через тела 5 качения ступица 6 вместе с нажимным диском 3 вывинчивается из корпуса 4, выбирая зазоры между поверхностями трения ведущего 1, ведомого 2 и нажимного 3 дисков, суммарная начальная величина которых составляет д .
Ведущий диск 1 через фрикционную связь с ведомым диском 2 и нажимным диском 3 вовлекает во вращение последний, способствуя дополнительному вывинчиванию ступицы 6 из корпуса 4, что увеличивает усилие прижима на жимного диска 3 к фрикционным поверх ностям. Угловое перемещение нажимного диска 3 со ступицей 6, обоймой 11 и якорем 10 происходит .до момента остановки этого перемещения ограничи телем 17. Ширина паза 18 обоймы 11 выбрана таким образом, что при неизношенных фрикционных накладках ведомого диска 2 указанного углового перемещения достаточно для выбора зазора Л.
По мере износа фрикционных накладок ведомого диска 2 в перемещении по винтовым канавкам 7 участвует только на имной диск 3 со ступицей 6, а обойма 11, удерживаемая от угло вого перемещения ограничителем 17, перемещается только в осевом направлении (механизм свободного хода .разблокирован) .
При этом происходит уменьшение остаточного зазора Б между корпусом электромагнита 8 и якорем 10.
В момент, когда зазор S перекрыва ется полностью и якорь 10 упирается в корпус электромагнита 8, нажимной диск 3 под воздействием динамического момента и сил инерции продолжает вращательное движение и прижимает ведомый диск 2 к ведущему I ,. деформи руя одновременно фрикционные накладки ведомого диска 2 вследствие подат ливости последних. Во время воздейст ВИЯ на нажимной диск 3 динамической и инерционной составляющих момента упомянутая деформация фрикционных накладок ведомого диска 2 достигае-г
68533
некоторого максимального значения. В это же время относительно заторможенной в угловом направлении обоймы
11 коническая поверхность 16 совершает осевое перемещение. Пружины 14 сжатия перемещают тела 15 качения, сохраняя их контакт с винтовыми канавками 12 обоймы 1I и с конической
10 поверхностью 16 ступицы 6 нажимного диска 3. После прекращения действия на нажимной диск 3 динамического и инерционного моментов сжатые фрикционные накладки ведомого диска 2,
15 восстанавливая свои размеры до величины, соответствующей равновесию упругих сил деформации накладок и нажимного усилия, перемещают нажимной диск 3 в обратном направлении. При
20 этом блокируется механизм свободного хода и перемещение нажимного диска 3 вызывает перемещение обоймы 11 с якорем 10. При этом восстанавливается зазор 5 между якорем 10 и корпу25 сом электромагнита 8, что восстанавливает величину усилия нажима, передаваемого на нажимной диск 3 от электромагнита 8.
30 Выключение сцепления происходит при обесточивании обмотки 9 возбуждения. Усилие нажима, развиваемое электромагнитом 8, исчезает, а пружины 19 отводят нажимной диск 3 со ступи25 цей 6 и заблокированным механизмом свободного хода вместе с якорем 10
. до упора в крьш1ку 20,
Формула изобретения
40
Фрикционное сцепление с электромагнитным управлением, содержащее ведущий, ведомый и нажимной диски, возвратные пружины, электромагнит с под45 вижным элементом, соединенным с нажимным диском, отличающее- с я тем, что, с целью улучшения эксплуатационных качеств путем автоматического регулирования рабочих
50 зазоров, оно снабжено ограничителем поворота подвижного элемента и механизмом свободного хода, вьтолненным в виде тел качения, размещенных в выполненных на цилиндрической поверхgg ности подвижного элемента винтовых канавках, при этом на нажимном диске выполнена коническая поверхность, контактирующая с телами качения.
| Петров В.А | |||
| Автоматические сцепления автомобилей | |||
| - М.: Машгиз, 1961, с | |||
| Плуг с фрезерным барабаном для рыхления пласта | 1922 |
|
SU125A1 |
