Изобретение относится к электротехнике, а именно к магнитострикционным устpoйctвaм типа двигателей, и может быть использована как исполнительный элемент в узлах высокоточных микроперемещений и микропередач различных контрольно-измерительных приборов, в оптико-механических устройствах, в высокоточных системах автоматического наведения, в высокоточных станках, а также в устройствах тех областей техники, где необходимо осуществлять небольшие плавные шаговые перемещения.
Известен Магнитострикционный шаговый двигатель, содержащий обмотку намагничивания, размещенную на магнитострикциОнном элементе, выполненном в виде шихтованного магнитопровода, поступательно перемещаемый стержень и два зажима, связанных с магнитопроводом, причем один из зажимов выполнен подвижным.
Недостатком данного двигателя является то, что нельзя с его помощью выполнить заданное перемещение более точно, чем с величиной шага А|, т.е. не обеспечивается достаточная точность микроперемещений объекта на заданное расстояние.
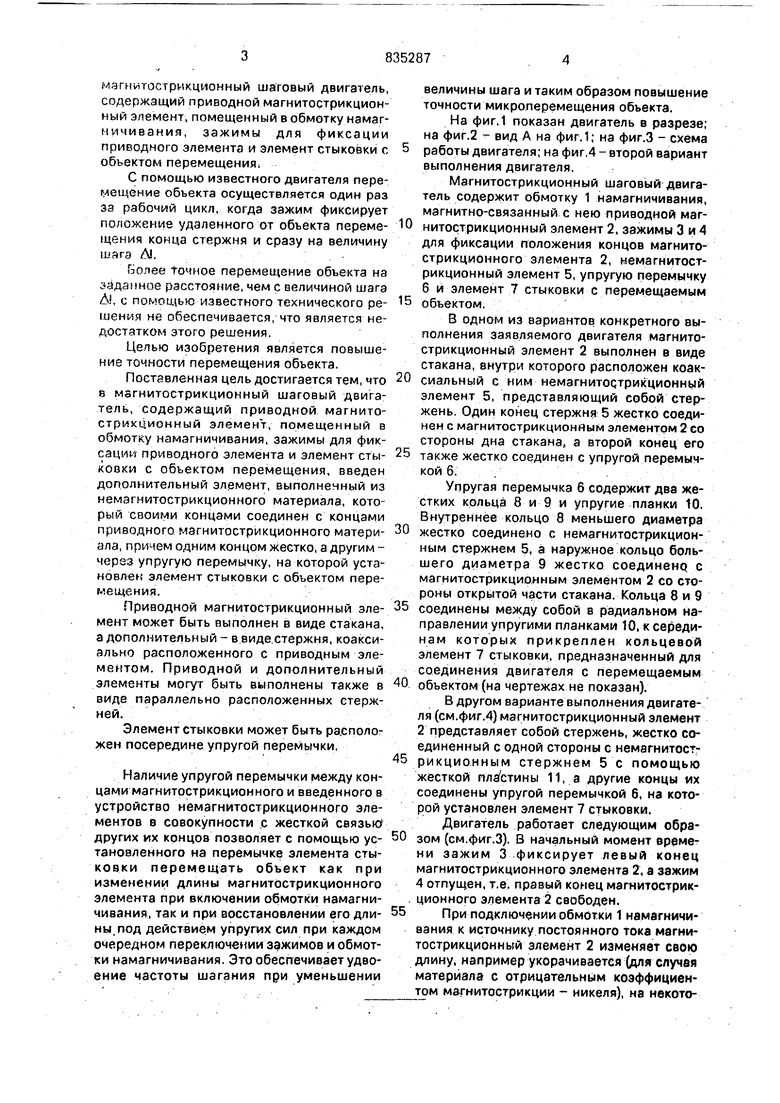
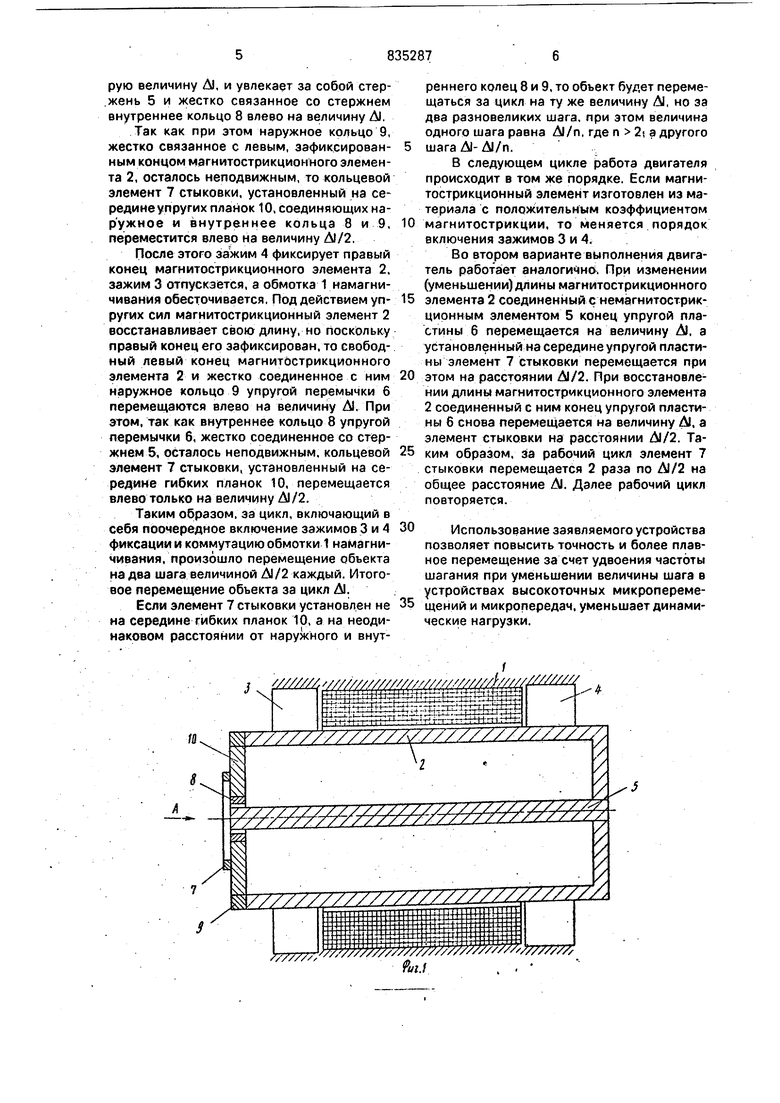
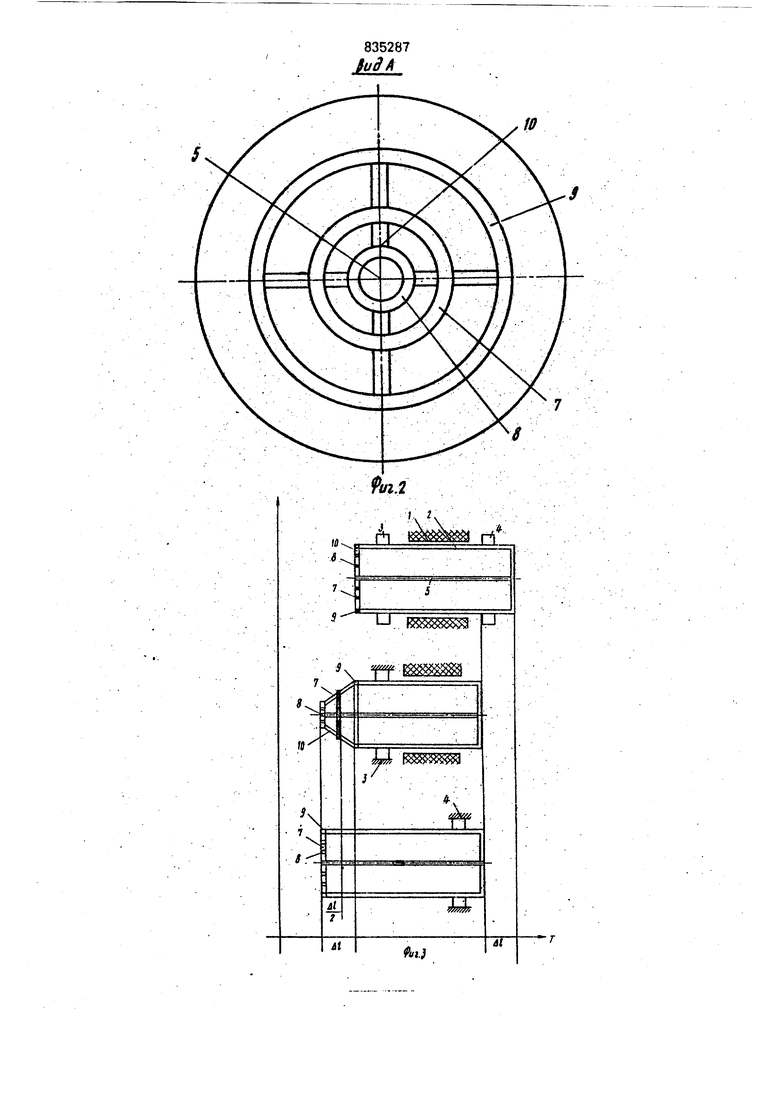
Наиболее близким по технической сущности к заявляемому устройству является мзгнитострикционный шаговый двигатель, содержащий приводной магнитострикциоииый элемент, помещенный в обмотку намагничивания, зажимы для фиксации приводного элемента и элемент стыковки с объектом перемещения С помощью известного двигателя пераглещение объекта осуществляется один раз за рабочий цикл, когда зажим фиксирует положение удаленного от объекта переме цения конца стержня и сразу на величину шага Д, Более Точное перемещение объекта на заданное расстояние, чем с величиной шага Д, с помощью известного технического решения не обеспечивается, что является недостатком этого решения. Целью изобретения является повышение точности перемещения объекта. Поставленная цель достигается тем, что б магнитострикционный шаговый двигатель, содержащий приводной магнитострикционный элемент, помещенный в обмотку намагничивания, зажимы для фиксации приводного элемента и элемент стыковки с объектом перемещения, введен дополнительный элемент, выполненный из немагнитострикционного материала, который своими концами соединен с концами приводного магнитострикционного материала, причем одним концом жестко, а другим через упругую перемычку, на которой установлен элемент стыковки с объектом перемещения. .Приводной магнитострикционный элемеит может быть выполнен в виде стакана, а дополнительный - в виде.стержня, коаксиально расположенного с приводным элементом. Приводной и дополнительный элементы могут быть выполнены также в виде параллельно расположенных стержней. Элемент стыковки может быть расположен посередине упругой перемычки. Наличие упругой перемычки между концами магнитострикционного и введенного в устройство немагнитострикционного элементов в совокупности .с жесткой СВЯЗЬЮ других их концов позволяет с помощью установЛенного на перемычке элемента стыковки перемещать объект как при изменении длины магнитострикционного элемента при включении обмотки намагничивания, так и при восстановлении его длины, под действием упругих сил при каждом очередном переключении зажимов и обмотки намагничивания. Это обеспечивает удвоение частоты шагания при уменьшении величины шага и таким образом повышение точности микроперемещения объекта. На фиг.1 показан двигатель в разрезе; на фиг.2 вид А на фиг.1; на фиг.З - схема работы двигателя; на фиг.4 - второй вариант выполнения двигателя. Магнитострикционный шаговый двигатель содержит обмотку 1 намагничивания, магнитно-связанный с нею приводной магнитострикционный элемент 2, зажимы 3 и 4 для фиксации положения концов магнитострикционного элемента 2, немагнитострикционный элемент 5, упругую перемычку 6 и элемент 7 стыковки с перемещаемым объектом. В одном из вариантов конкретного выполнения заявляемого двигателя магнитострикционный элемент 2 выполнен в виде стакана, внутри которого расположен коаксиальный с ним немагнитострикционный элемент 5, представляющий собой стержень. Один конец стержня 5 жестко соединен с магнитострикционяым элементом 2 со стороны дна стакана, а второй конец его также жестко соединен с упругой перемычкой 6. Упругая перемычка б содержит два жестких кольца 8 и 9 и упругие планки tO. Внутреннее кольцо 8 меньшего диаметра жестко соединено с немагнитострикционным стержнем 5, а наружное кольцо большего диаметра 9 жестко соединенр с магнитострикциохным элементом 2 со стороны открь1той части стакана. Кольца 8 и 9 соединены между собой в радиальном направлении упругими планками 10, к серединам которых прикреплен кольцевой элемент 7 стыковки, предназначенный для соединения двигателя с перемещаемым объектом (на чертежах не показан). В другом варианте выполнения двигателя (см.фиг.4) магнитострикционный элемент 2 представляет собой стержень, жестко соединенный с одной стороны с немагнитострикционным стержнем 5с помощью жесткой пла стины 11, а другие концы их соединены упругой перемычкой б, на которой установлен элемент 7 стыковки. Двигатель работает следующим образом (см.фиг.З). В начальный момент времени зажим 3 фиксирует левый конец магнитострикционного элемента 2, а зажим 4 отпущен, т.е. правый конец магнитострикционного элемента 2 свободен. При подключении обмотки 1 намагнмчивания к источнику постоянного тока магнитострикционный злемент 2 изменяет свою длину, например укорачивается (для случая материала с отрицательным коэффициентом магнитострикции - никеля), на некоторую величину Д|, и увлекает за собой стер.жень 5 и жестко связанное со стержнем внутреннее кольцо 8 влево на величину Д|. Так как при этом наружное кольцо 9, жестко связанное с левым, зафиксированным концом магнитострикционного элемента 2, осталось неподвижным, то кольцевой элемент 7 стыковки, установленный на серединеупругих планок 10, соединяющих наружное и внутреннее кольца 8 и 9, переместится влево на величину Д|/2, После этого зажим 4 фиксирует правый конец магнитострикционного элемента 2, зажим 3 отпускается, а обмотка 1 намагничивания обесточивается. Под действием упругих сил магнитострикционный элемент 2 восстанавливает свою длину, но поскольку правый конец его зафиксирован, то свободный левый конец магнитбстрикционного элемента 2 и жестко соединенное с ним наружное кольцо 9 упругой перемычки б перемещаются влево на величину Д1. При этом, так как внутреннее кольцо 8 упругой перемычки 6, жестко соединенное со стержнем 5, осталось неподвижным, кольцевой элемент 7 стыковки, установленный на середине гибких планок 10. перемещается влево только на величину Д|/2. Таким образом, за цикл, включающий в себя поочередное включение зажимов 3 и 4 фиксации и коммутацию обмотки 1 намагничивания, произошло перемещение обьекта на два шага величиной Д|/2 каждый. Итоговое перемещение объекта за цикл Д. Если элемент 7 стыковки установлен не 3 на середине гибких планок 10, а на неодинаковом расстоянии от наружного и внутJ ///////, ////////////////Ш
7/////////////////У //////У// / У ////////,
i////////////// fui.. реннего колец В и 9, то обьект будет перемещаться за цикл на ту же величину Д1, но за два разновеликих шага, при этом величина одного шага равна Д|/п, где п 2; а другого шагаД1-Д1/п. В следующем цикле работа двигателя происходит в том же порядке. Если магнитострикционный элемент изготовлен из материала с положительным коэффициентом магнитострикции. то меняется порядок включения зажимов 3 и 4. Во втором варианте выполнения двигатель работает аналогична. При изменении (уменьшении) длины магнитострикционного элемента 2 соединенный с немагнитострикцирнным элементом 5 конец упругой пластины б перемещается на величину Л. а установленный на середине упругой пластины элемент 7 стыковки перемещается при этом на расстоянии Л1/2. При восстановлении длины магнитострикционного элемента 2 соединенный с ним конец упругой пластины 6 снова перемещается на величину Д|, а элемент стыковки на расстоянии Д1/2. Таким образом, за рабочий цикл элемент 7 стыковки перемещается 2 раза по Al/2 на общее расстояние Al. Далее рабочий цикл повторяется. Использование заявляемого устройства озволяет повысить точность и более плавое перемещение за счет удвоения частоты агания при уменьшении величины шага в стройствах высокоточных микроперемеений и микропередач, уменьшает динамиеские нагрузки.
835287
W
8
УЛ////
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЛИНЕЙНЫХ ПРЕЦИЗИОННЫХ ПЕРЕМЕЩЕНИЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1990 |
|
RU2017313C1 |
| Магнитострикционный шаговый двигатель | 1981 |
|
SU993791A1 |
| Магнитострикционный шаговый двигатель угловых перемещений | 1982 |
|
SU1091792A1 |
| Магнитострикционное устройство микроперемещений | 1983 |
|
SU1124821A1 |
| Шаговый двигатель | 1980 |
|
SU920904A1 |
| МАГНИТОСТРИКЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2074456C1 |
| Способ управления линейным шаговым двигателем | 1987 |
|
SU1542375A1 |
| Магнитострикционный шаговый двигатель линейных перемещений | 1986 |
|
SU1369619A1 |
| Шаговый привод малых угловых перемещений | 1980 |
|
SU920903A1 |
| Магнитострикционное устройство линейных микроперемещений | 1984 |
|
SU1286030A1 |
1.МАГНИТОСТРИКЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ, содержащий приводной Магнитострикционный элемент, помещенный в обмотку намагничивания, зажимы для фиксации приводного элемента и элемент стыковки с объектом перемещения, о т л и - чающий с я тем, что, с целью повышения точности перемещения объекта, в него введен дополнительный элемент, выполнен^ный из немагнитострикционного материала, который своими концами соединен с концами приводного магнитострикционно- го элемента, причем одним концом - жестко, а другим концом через упругую перемычку, на которой установлен элемент стыковки с объектом перемещения.2.Двигатель по п. 1,отличающий - с я тем, что приводной магнитострикцион- ный элемент выполнен в виде стакана, а дополнительный - в виде'стержня, коакси- алъно расположенного с приводным элементом.Э.Двигатель по П.1, о т л и ч а ю щ и и - с я тем, что приводной Магнитострикционный элемент и дополнительный элемент вы- ^олнены в виде параллельно расположенных стержней. ^4.Двигатель по пп. 1,2 и 3, о т л и ч а ю- щ и и с я тем, что элемент стыковки с перемещаемым объектом установлен посередине упругой перемычки.^
ГЦ
7//// //
9игЛ
| МАГНИТОСТРИКЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1966 |
|
SU223913A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и Шорчик B.C | |||
| Магнитострикционный привод микропередач | |||
| Станки и инструмент, 1960, Мг 1. | |||
