Изобретение относится к линейным шаговым двигателям со стрикционными движущими элементами и может быть использовано в станках и оптических приборах.
Цель изобретения - повышение плавности отработки шага перемещения упругой нагрузки.
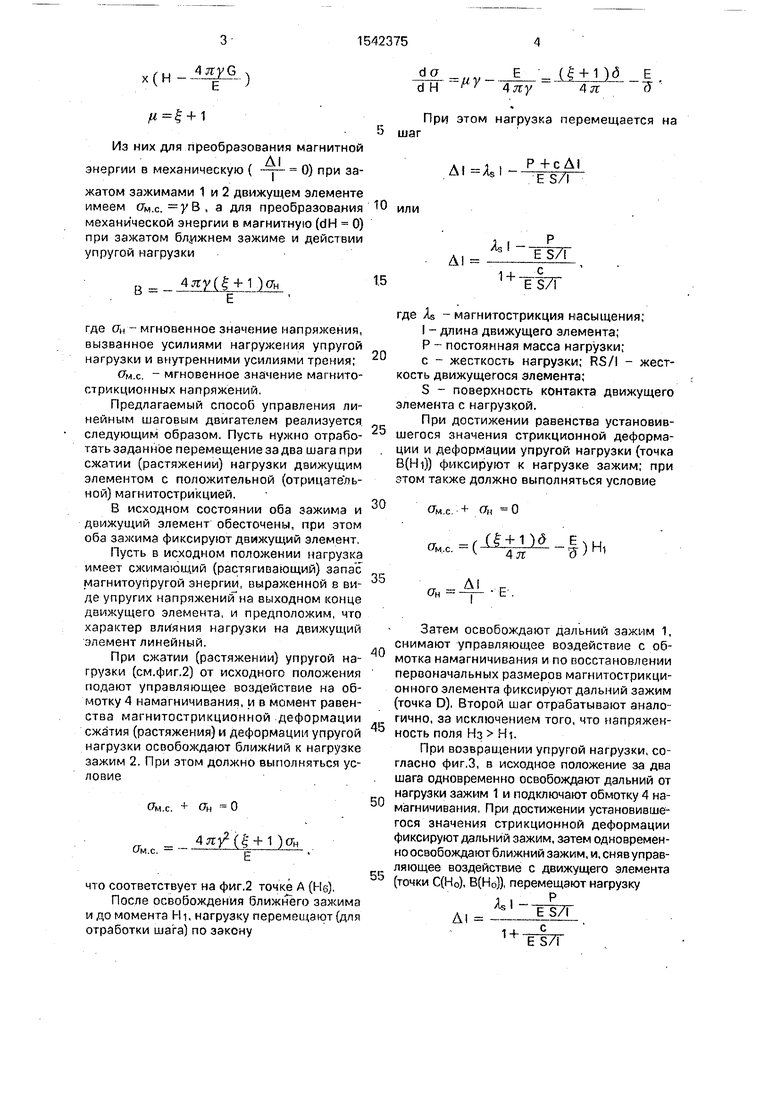
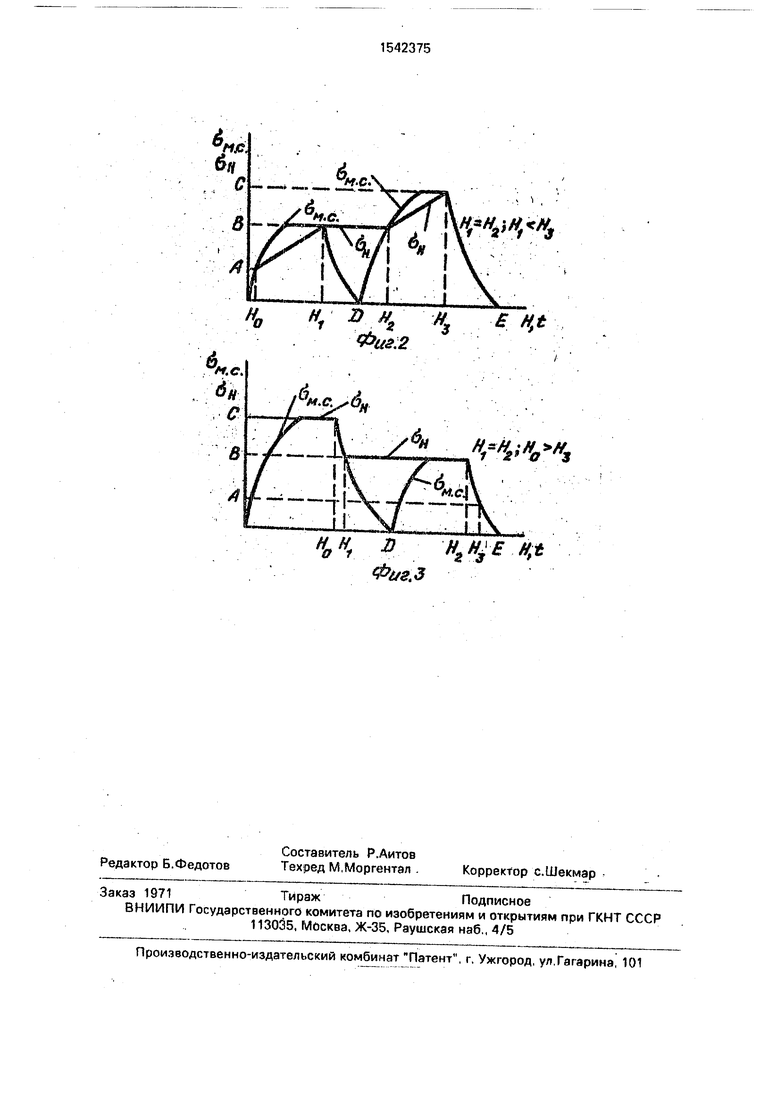
На фиг.1 схематически изображен линейный шаговый двигатель с магнитострик- ционным движущим элементом, двумя зажимами и упругой нагрузкой; на фиг.2 изображены две совмещенные, диаграммы отработки двух шагов при сжатии (растяжении) упругой нагрузки магнитострикцион- ным движущим элементом с положительным (отрицательным) магнитострикционным эффектом: диаграмма магнитострикционных напряжений от напряженности магнитного поля и временная диаграмма напряжений от упругой нагрузки; на фиг.З - две совмещенные такой же зависимостью диаграммы
двух шагов при возвращении в исходное положение
Линейный шаговый двигатель содержит два зажима 1 и 2, магнитострикционный элемент 3 с обмоткой 4 намагничивания, перемещающий упругую нагрузку 5.
Так как деформации растяжения и сжатия направлены вдоль одной оси (продольной оси движущего элемента), перепишем уравнение прямого и обратного магнитострикционных эффектов, опустим тензорные индексы при магнитной восприимчивости Ј, модуле Юнга Е, константах, определяющих прямой у и обратный 7 4jry магнитострикцион- ные эффекты,
Д| уВ а fЕ Е
В ц Н //4л:уЈ (Ј + 1 )х
(Л 4 N W
9
х ( Н - -
+ 1
Из них для преобразования магнитной энергии в механическую ( -у- 0) при зажатом зажимами 1 и 2 движущем элементе имеем 7м.с. уВ, а для преобразования механической энергии в магнитную (dH 0) при зажатом ближнем зажиме и действии упругой нагрузки
--цу4л:у
4л:о
При этом нагрузка перемещается на
шаг
AI Asl Р +cAl Е S/I
10
или
А1
Asl-

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления линейным шаговым двигателем | 1987 |
|
SU1491299A1 |
| Способ управления магнитострикционным шаговым исполнительным устройством | 1988 |
|
SU1616488A1 |
| Магнитострикционный шаговый двигатель линейных перемещений | 1986 |
|
SU1369619A1 |
| Магнитострикционный шаговый двигатель | 1980 |
|
SU835287A1 |
| СПОСОБ УПРАВЛЕНИЯ СТРИКЦИОННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1989 |
|
SU1734556A1 |
| Магнитострикционный шаговый двигатель угловых перемещений | 1982 |
|
SU1091792A1 |
| Мембранный патрон | 1982 |
|
SU1063542A1 |
| МАГНИТОСТРИКЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2074456C1 |
| Установка для измерения зависимости магнитострикции нежёсткого объекта от величины внешнего магнитного поля | 2019 |
|
RU2721718C1 |
| СПОСОБ ПОЗИЦИОННОГО УПРАВЛЕНИЯ СТРИКЦИОННЫМ МЕХАНИЗМОМ | 1989 |
|
RU2012031C1 |
Изобретение относится к линейным шаговым двигателям и может быть использовано в станках и оптических приборах. Цель изобретения - повышение плавности отработки шага перемещения. Для перемещения нагрузки производят последовательную коммутацию управляющих воздействий на двух зажимах и размещенном между ними стрикционном элементе Освобождение и фиксацию ближнего к нагрузке зажима производят в моменты равенства сил, действующих на этот зажим со стороны упругой нагрузки и стрикционного элемента. Этим исключаются рывки при перемещении нагрузки и повышается срок службы ближнего зажима 3 ил
В
4лгу(Ј + 1 )сгн Е
где 7Н - мгновенное значение напряжения, вызванное усилиями нагружеиия упругой нагрузки и внутренними усилиями трения;
OM.C. - мгновенное значение магнито- глрикционных напряжений.
Предлагаемый способ управления линейным шаговым двигателем реализуется следующим образом. Пусть нужно отработать заданное перемещение за два шага при сжатии (растяжении) нагрузки движущим элементом с положительной (отрицательной) магнитострикцией,
В исходном состоянии оба зажима и движущий элемент обесточены, при этом оба зажима фиксируют движущий элемент.
Пусть в исходном положении нагрузка имеет сжимающий (растягивающий) запас магнитоупругой энергии, выраженной в виде упругих напряжений на выходном конце движущего элемента, и предположим, чго характер влияния нагрузки на движуа(ий элемент линейный.
При сжатии (растяжении) упругой нагрузки (см.фиг.2) от исходного положения подают управляющее воздействие на обмотку 4 намагничивания, и в момент равенства магнитострикционной деформации сжатия (растяжения) и деформации упругой нагрузки освобождают ближний к нагрузке зажим 2. При этом должно выполняться условие
Он.с. + 7Н -О
СГм.с.
4rc/(g + 1 )OH Е
что соответствует на фиг.2 точке А (Не).
После освобождения ближнего зажима и до момента Hi. нагрузку перемещают (для отработки шага) по закону
где As - магнитострикция насыщения;
I - длина движущего элемента;
Р - постоянная масса нагрузки;
с - жесткость нагрузки; RS/I - жесткость движущегося элемента;
S - поверхность контакта движущего элемента с нагрузкой.
При достижении равенства установившегося значения стрикционной деформации и деформации упругой нагрузки (точка B(Hi)) фиксируют к нагрузке зажим; при зтом также должно выполняться условие
Оме + О 0
Ом.С.
(11+ШЕчН
4гг# П1
0
0
5
-Е.
Затем освобождают дальний зажим 1, снимают управляющее воздействие с обмотка намагничивания и по восстановлении первоначальных размеров магнитострикци- онного элемента фиксируют дальний зажим (точка D), Второй шаг отрабатывают аналогично, за исключением того, что напряженность поля Нз Hi.
При возвращении упругой нагрузки, согласно фиг.З, в исходное положение за два шага одновременно освобождают дальний от нагрузки зажим 1 и подключают обмотку 4 намагничивания, При достижении установившегося значения стрикционной деформации фиксируют дальний оажим, затем одновременно освобождают ближний зажим, и, сняв управляющее воздействие с движущего элемента (точки С(Н0), В(Н0)), перемещают нагрузку
Р Ґs7T
Al
Asl
Упругие и магнитострикционные деформации совпадают.
При достижении равенства 0М с + Он 0 фиксируют ближний зажим (точки B(Hi), А(Нз).
Таким образом, по сравнению с прототипом использование предложенного способа управления линейным шаговым двигателем позволяет повысить плавность при пошаговом сжатии (растяжении) и по- шаговом возвращении упругой нагрузки. Плавного перемещения нагрузки достигают благодаря тому, что коммутацию ближнего к нагрузке зажима осуществляют в моменты равенства энергии упругой деформации от действия нагрузки и энергии стрикционной деформации сжатия (растяжения). Кроме этого, устранение рывков нагрузки при коммутациях ближнего к нагрузке зажима в моменты равенства энергий повышает срок службы ближнего зажима.
Формула изобретения Способ управления линейным шаговым двигателем, заключающийся в последова- тельной коммутации управляющих воздействий на стрикционном движущем элементе
и двух зажимах, причем при одинаковых знаках стрикционной деформации и требуемой деформации нагрузки фиксируют ближний к нагрузке зажим и освобождают дальний, подают управляющее воздействие на движущий элемент, после перемещения дальнего зажима фиксируют его, снимают управляющее воздействие с движущего элемента, освобождают ближний зажим и после перемещения нагрузки фиксируют его, а при разных знаках стрикционной деформации и требуемой деформации нагрузки управляющее воздействие на движущий элемент подают при зафиксированных обоих зажимах, далее освобождают ближний к нагрузке зажим, фиксируют его вновь, снимают управляющее воздействие с движущего элемента и одновременно освобождают дальний зажим, фиксируют дальний зажим после восстановления первоначальных размеров движущего элемента, отличающийся тем, что, с целью повышения плавности перемещения, освобождают и фиксируют ближний к нагрузке зажим в момент достижения равенства друг другу сил деформации стрикционного элемента и упругой нагрузки
««а:--а
Фи,1
л; а ц
Фи&.2
ГЧ.
HQH, Д
лч
ra,/(/J
ц
Фи&.2
3
Ј Htt
H9KE Htt
Фиг.З
| Пьезоэлектрический линейный шаговый двигатель | 1978 |
|
SU752560A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ управления линейным шаговым двигателем | 1987 |
|
SU1491299A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
