Изобретение относится к сельскохозяй- с 1венн(1му машиностроению и может быть использовано в уборочных аппаратах хлоп- кочборочных машип.
Целью изобретения является повышение (ффективности функционирования рабочего (1)ганс1 хлопкоуборочного аппарата путем об ч 1оче1:ин снижения собственных ко- .ie6aHiiii иынолненни технологического |1)оцсчч-а c( хлопка.
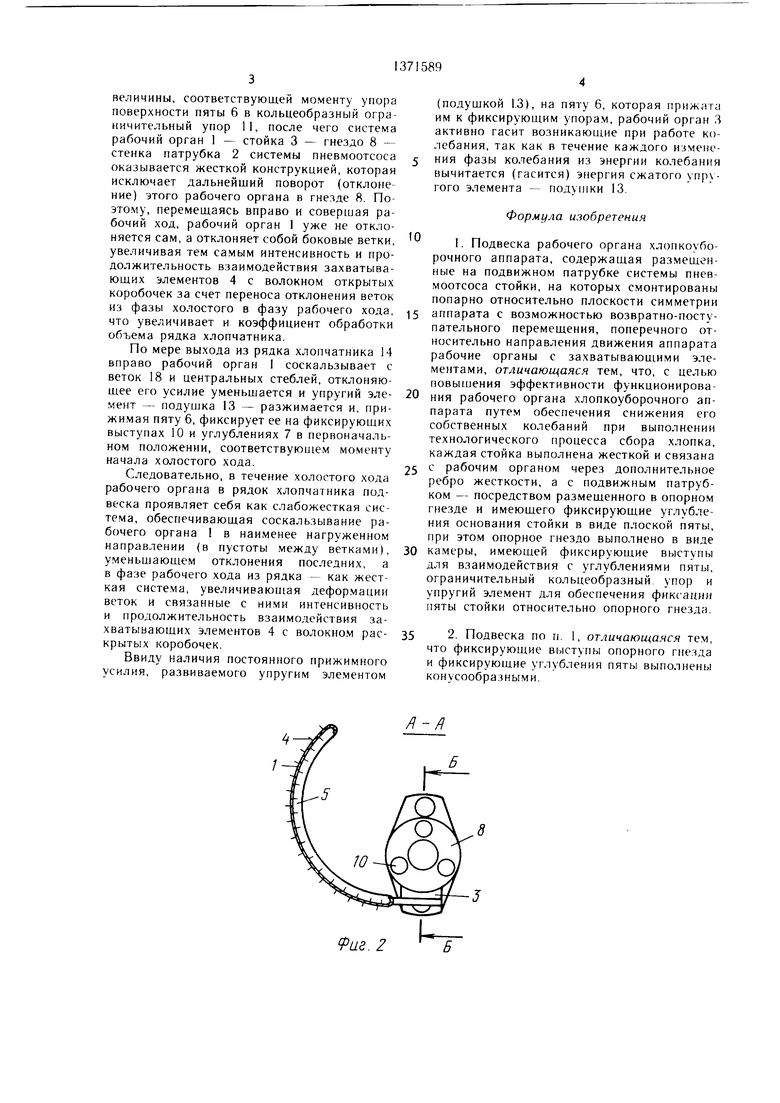
Ма (|)иг. 1 изображена подвеска рабочего ii tr;ina хлопкоуборочного агтарата; на ijHir. 2 сечение А-А на фиг. 1; па фиг. 3 - pa.( Б-Б па фиг. 2; па фиг. 4 опорное .(i (пита стойки и ун1)угий эле.мент не пока.запы). сечение.
Ппдш ска рабочего органа I хлопкоуборочи мго аппарата содержит размещенные
и ; 1 ;1ияжпом 2 :1Непмосистемы
i.MoiiKii Л, на которых смонтированы непарно
11 )С1 1Ч . 1ьнг) п.лоско1 ти симмстрии аппарата
, ::.: . ii .ti : ,; иозвр..-;i-ч т пательногсо
( лн иснг;:, iiu:ic e4Hui4i (лиостсльно ).;:-,.;;ч)яя л .ижснпя. С ргани 1 с
,:iTbiii;;n.4i,;i.MH j. icMcii Iамн --I. Стойка 3
ifpi i допплпительное ребро 5 жесткости
. 1 с |) ()pi aH(;.v( , выполненным
}; liii.ic расположенной горизгиггально части
ди., на которой укреплены захваты(Гмопис Ti.icMeHTbi 4. Основание стойки 3
.;i;i) в виде плоскости пяты 6, и.меюMi Ti i;:; поверхности ({ иксируюшие углуб.че;i:i:i 7. На стенке подвижного патрубка 2
: , П Т: осг укрегь гено онорпоо 1 незло 8,
,, р ч. )i имеет камерч У с ({.шксирующими выступами I(J и О раничительным
,i eor )p;i3Ht;i.v упг)ром 11. f5 нижней части
:::Л; р;1 II Hi lrri ;)КПО 12. M j.) ,i ПЧ.фОе СВОildi-:; ;;,кч; iiHia fi vdHKH ii. 1ята () I BiMiMii ф|-,к. ionuiMii yi ;i , ,., 7 подпружинена к фиксирующим выступам 10 11:С(.,1 S 1 ругими элементами, например |)езиновой подушкой 13. Рабочий орган 1 с;;чет; нием поперечных к рядку хлопчатника 14 с 11родол1 ной осью (вдоль рядков) 15 ко.кбаний и продольного пере.мешения вдоль pHiKi H. образованных растениями 16, 17 и I I., взаимодействует с боковыми вет- каг.: 18 и расположенными на них раскрыты i и коробочка.ми 19. При утом жесткость пп |(,го э. емента нодушки 13 выбирается . c i, I. V- Л..ССТК1 ci, с.:; ПиЛьных стеб- 1еи и Гнжовых веток 18 у их основания.
Подвеска рабочего органа хлопкоубороч- iin- ашь Ч ата обеспечивает возможность ;ч 11-носа (смеп1ения) момента соскальзывания, т. е. потери механического контакта Рабочего органа 1 с волокном раскрытых ко ия очек (веток) из фазы холостого хода (в.чода в рядок), когда он не способен захватить собой хлопок, в фазу рабочего хода {выхода из рядка), когда рабочий орган 1 ак1ивно захватывает хлопок и увлекает его собой в приемную камеру. При 5том жесткая сгонка . вьпю. шяет функпию жесткого ки0
нематического звена, обеспечивающего передачу отклонений рабочего органа 1 на элементы подвески.
Если бы стойка 3 была упругой, то пере- 5 дача указанных отклонений рабочего органа была бы нарушена.
Плоская пята 6 служит жестким звеном для установки рабочего органа 1 в подвеске. Ограничительный кольцеобразный упор 11 служит для ограничения предельных отклонений рабочего органа I, исключения его поломок, усиления процесса скольжения веток (поверхностей раскрытых коробочек) по поверхности рабочего органа 1 в фазе рабочего хода и гащения колебаний.
5Фиксирующие углубления 7 (на пяте 6)
и выступы 10 (в гнезде 8) служат для возврата рабочего органа 1 после соскальзывания с него ветки, т. е. в начале каждой фазы холостого хода в одно и то же исходное положение, обеспечивающее равную воз0 можность его отклонения в разные стороны и постоянство но величине фиксирующего пяту минимального момента, создающего минимальные усилия взаимодействия с ветками в фазе холостого хода. Отсутствие фик5 сации рабочего органа в исходном положении некоторым минимальным моментом вызвало бы изменение отклоняющего в данном направлении момента, вызванного действием встретившейся ветки.
Конусная форма фиксирующих углублеQ НИИ и выступов 10 обеспечивает точное фиксирование рабочего органа 1 в исходно.м положении по вершинам трех конусов, равенство отклоняющих моментов и максимальных отклонений (до момента упора пяты 6 в фиксируюп1ий упор II) в разных
5 направлениях.
Функционирование установленного на подвеске рабочего органа хлопкоуборочного аппарата осуществляется следующим образом.
При перемещении подвижного (колеб0 лющегося в направлениях поперек рядка с частотой /) патрубка 2 пневмоотсоса, например, влево через упругий элемент - подушку 13, пяту 6 и стойку 3 движение передается рабочему органу 1, который начинает
5 совершать холостой ход - вход в массу рядка хлопчатника 14. Встретившись с боковой веткой 18 или центральным стеблем растения 16 куста хлопчатника, рабочий орган 1 отклоняется им, сжимая упругий элемент - подушку 13 - и уменьшая в соответствую0 щем данному отклонению участке зазор между поверхностью пяты 6 и кольцеобразным упором II, и соскальзывает в пустоты между этими ветками, уменьшая тем самым деформацию последних в течение холостого хода. Дойдя до крайнего левого положения,
5 рабочий орган I заканчивает холостой ход, а под влиянием продольного перемещения V усилие отклонения ветками 18 и стеблями возрастает и отклоняет его до предельной
величины, соответствующей моменту упора поверхности пяты 6 в кольцеобразный ограничительный упор 11, после чего система рабочий орган 1 - стойка 3 - гнездо 8 - стенка патрубка 2 системы пневмоотсоса оказывается жесткой конструкцией, которая исключает дальнейший поворот (отклоне ние) этого рабочего органа в гнезде 8. Поэтому, перемещаясь вправо и совер1иая рабочий ход, рабочий орган 1 уже не отклоняется сам, а отклоняет собой боковые ветки, увеличивая тем самым интенсивность и продолжительность взаимодействия захватывающих элементов 4 с волокном открытых коробочек за счет переноса отклонения веток из фазы холостого в фазу рабочего хода, что увеличивает и коэффициент обработки объема рядка хлопчатника.
По мере выхода из рядка хлопчатника 14 вправо рабочий орган 1 соскальзывает с веток 18 и центральных стеблей, отклоняющее его усилие уменьшается и упругий элемент - подушка 13 - разжимается и, прижимая пяту 6, фиксирует ее на фиксирующих выступах 10 и углублениях 7 в первоначальном положении, соответствующем моменту начала холостого хода.
Следовательно, в течение холостого хода рабочего органа в рядок хлопчатника подвеска проявляет себя как слабожесткая система, обеспечивающая соскальзывание рабочего органа 1 в наименее нагруженном направлении (в пустоты между ветками), уменьщающем отклонения последних, а в фазе рабочего хода из рядка - как жесткая система, увеличивающая деформации веток и связанные с ними интенсивность и продолжительность взаимодействия захватывающих элементов 4 с волокном раскрытых коробочек.
Ввиду наличия постоянного прижимного усилия, развиваемого упругим элементом
(подущкой 1.3), на пяту 6, которая прижата им к фиксирующим упорам, рабочий орган 3 активно гасит возникающие при работе колебания, так как в течение каждого изменения фазы колебания из энергии колебания вычитается (гасится) энергия сжатого упругого элемента - подуп1ки 13.
Формула изобретения
I. Подвеска рабочего органа хлопкоуборочного аппарата, содержащая размещенные на подвижном патрубке системы пневмоотсоса стойки, на которых смонтированы попарно относительно плоскости симметрии
аппарата с возможностью возвратно-поступательного перемещения, поперечного относительно направления движения аппарата рабочие органы с захватывающими элементами, отличающаяся тем, что, с целью повышения эффективности функционирования рабочего органа хлопкоуборочного аппарата путем обеспечения снижения его собственных колебаний при выполнении технологического процесса сбора хлопка, каждая стойка выполнена жесткой и связана
с рабочим органом через дополнительное ребро жесткости, а с подвижным патрубком - посредством размещенного в опорном гнезде и имеющего фиксирующие углубления основания стойки в виде плоской пяты, при этом опорное гнездо выполнено в виде
камеры, имеющей фиксирующие выступы для взаимодействия с углублениями пяты, ограничительный кольцеобразный упор и упругий элемент для обеспечения фиксации пяты стойки относительно опорного гнезда.
2. Подвеска по п. 1, отличающаяся тем, что фиксирующие выступы опорного гне.чда и фиксирующие углубления пяты выполнены конусообразными.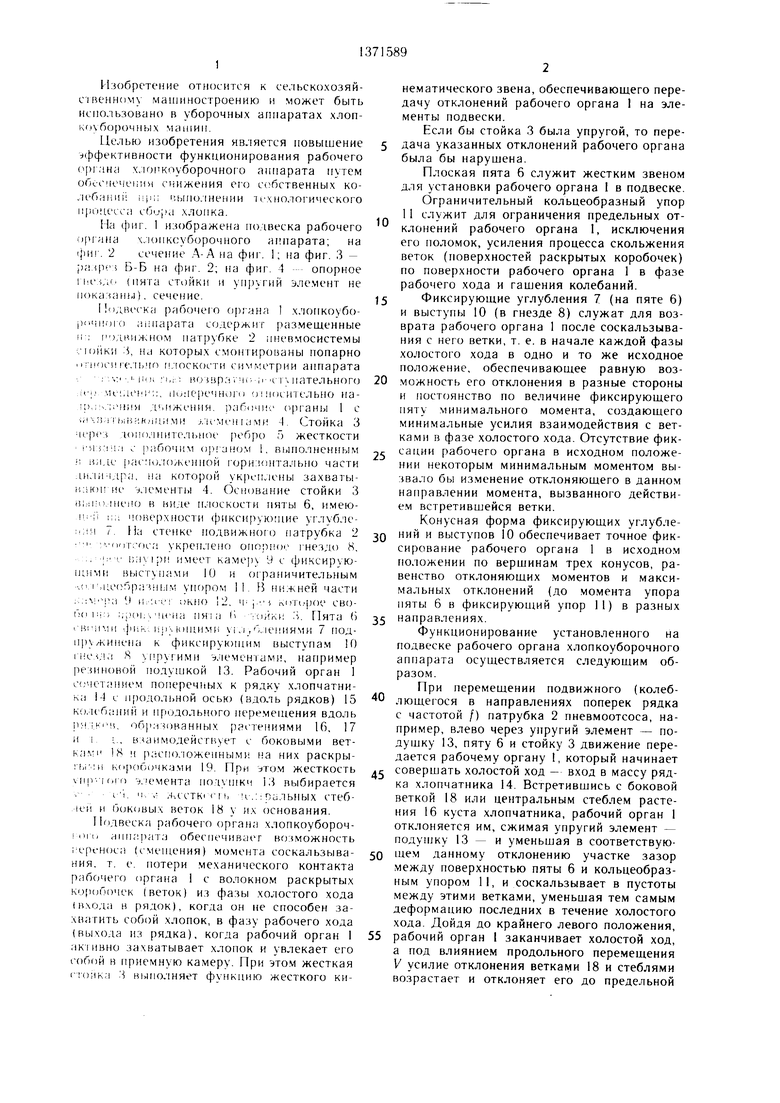
| название | год | авторы | номер документа |
|---|---|---|---|
| Хлопкоуборочный аппарат | 1982 |
|
SU1127540A1 |
| Хлопкоуборочный аппарат | 1986 |
|
SU1391526A2 |
| Хлопкоуборочный аппарат | 1986 |
|
SU1428266A1 |
| Пневматический подборщик хлопка | 1990 |
|
SU1739889A1 |
| Пневматический хлопкоуборочный аппарат | 1989 |
|
SU1746933A1 |
| Хлопкоуборочный аппарат | 1981 |
|
SU1085550A1 |
| Хлопкоуборочный аппарат | 1972 |
|
SU471880A1 |
| Устройство для уборки хлопка | 1982 |
|
SU1117006A1 |
| Пневматический аппарат для обработки кустов хлопчатника | 1980 |
|
SU1007589A1 |
| Ротационный рабочий орган | 1989 |
|
SU1667655A1 |
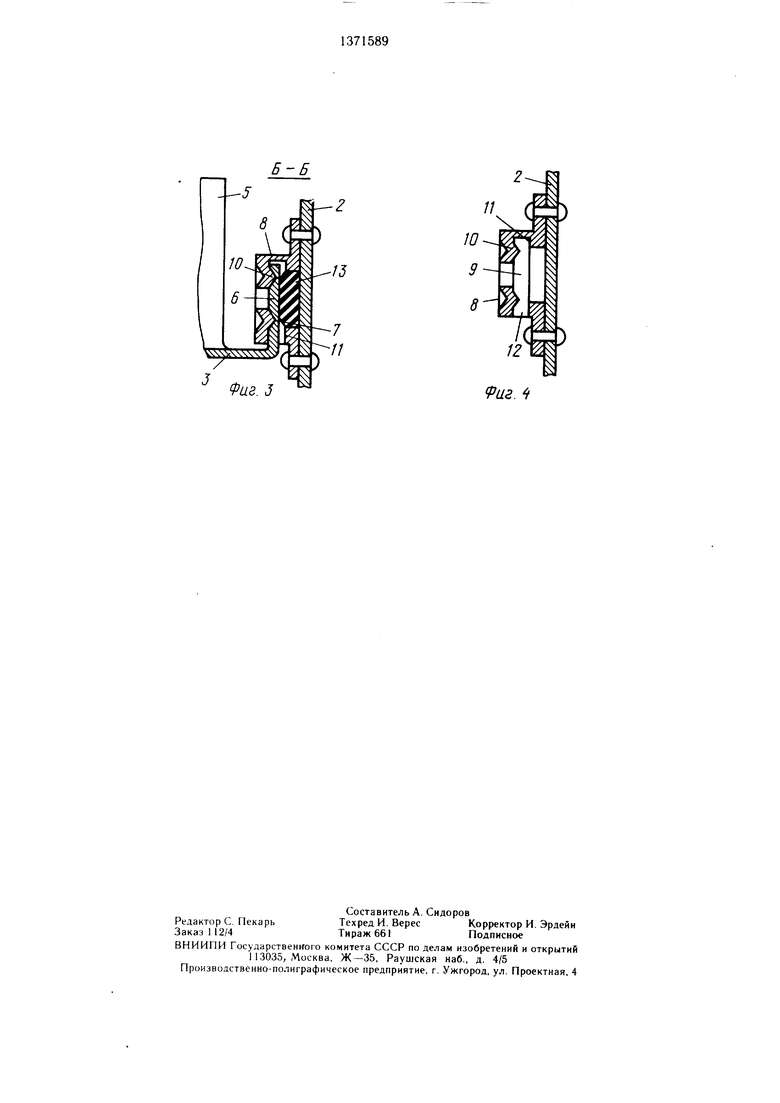
Изобретение относится к сельскохозяйственному машиностроению. Целью изобретения является повышение эффективности функционирования рабочего органа хлопкоуборочного аппарата путем обеспечения снижения ег-о собственных колебаний при выполнении технологического процесса сбора хлопка. Каждая стойка 3 подвески выполнена жесткой и связана с рабочим органом (РО) 1 через дополнительное ребро жесткости 5, а с подвижным патрубком 2 - посредством размещенного в опорном гнезде ,/ 79 17 /о (ОГ) 8 и имеющего фиксирующие углубления 7 основания стойки 3 в виде плоской пяты 6. При этом ОГ 8 выполнено в виде камеры, имеющей фиксирующие выступы 10 для взаимодействия с углублениями 7, ограничительный кольцеобразный упор 11 и упругий элемент, подушку 13 для обеспечения фиксации пяты 6 относительно ОГ 8. Фиксирующие выступы 10 ОГ 8 и фиксирующие углубления 7 пяты 6 выполнены конусообразными. При перемещении патрубка 2 пнев- моотсоса, например, влево через подущку 13, пяту 6 и стойку 3 движение передается РО 1. Встретившись с веткой или центральным стеблем, РО отклоняется, сжимая подущку 13, уменьщая в соответствующем данному отклонению участке зазор между пятой 6 и упором II, соскальзывает между ветками. Под влиянием продольного пере.мещения аппарата система РО 1 - стойка 3 - ОГ 8 - стенка патрубка 2 оказывается жесткой конструкцией. РО 1, перемещаясь вправо, отклоняет собой ветки, увеличивая тем самым интенсивность и продолжительность взаимодействия захватывающих элементов с волокном открытых коробочек. 1 з. п. ф-лы, 4 ил. е (Л со О1 00 со 7/ . /
иг. Z
/1-/J
Б-Б
11
J
Фиг. J
| Машина для сбора хлопка | 1930 |
|
SU22381A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Хлопкоуборочный аппарат | 1982 |
|
SU1127540A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
