Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам для уборки хлонка.
Известно устройство для уборки хлопка, содержащее смонтированную на раме приемную камеру, относительно оси симметрии которой по обе стороны установлены в вертикальных плоскостях пары зубчатых рабочих органов, включающие параллельно расположенные кустоочесыватели и съемники 1.
Недостатком известного устройства является неэффективное взаимодействие кустоочесывателей с кустовой массой смежных рядков.
Цель изобретения - увеличение полноты сбора хлопка.
Цель достигается тем, что в устройстве для уборки хлопка, со цержащем смонтированную на раме приемную камеру, относите 1ьно оси симметрии которой по обе стороны установлены в вертикальных плоскостях пары зубчатых рабочих органов, имеющие параллельно расположенные кустоочесыватели и съемники, рабочие органы выполнены в виде рамок, а зубчатые элементы кустоочесывателей и съемников в каждой паре расположены горизонтальными рядами с относительным смещением по вертикали, причем кустоочесыватели и съе.мники кинематически связаны между собой и установлены с возможностью одновременного равнонаправленного возвратнопоступательного перемещения, при этом рама установлена на вертикальной оси с возможностью качания относительно последней.
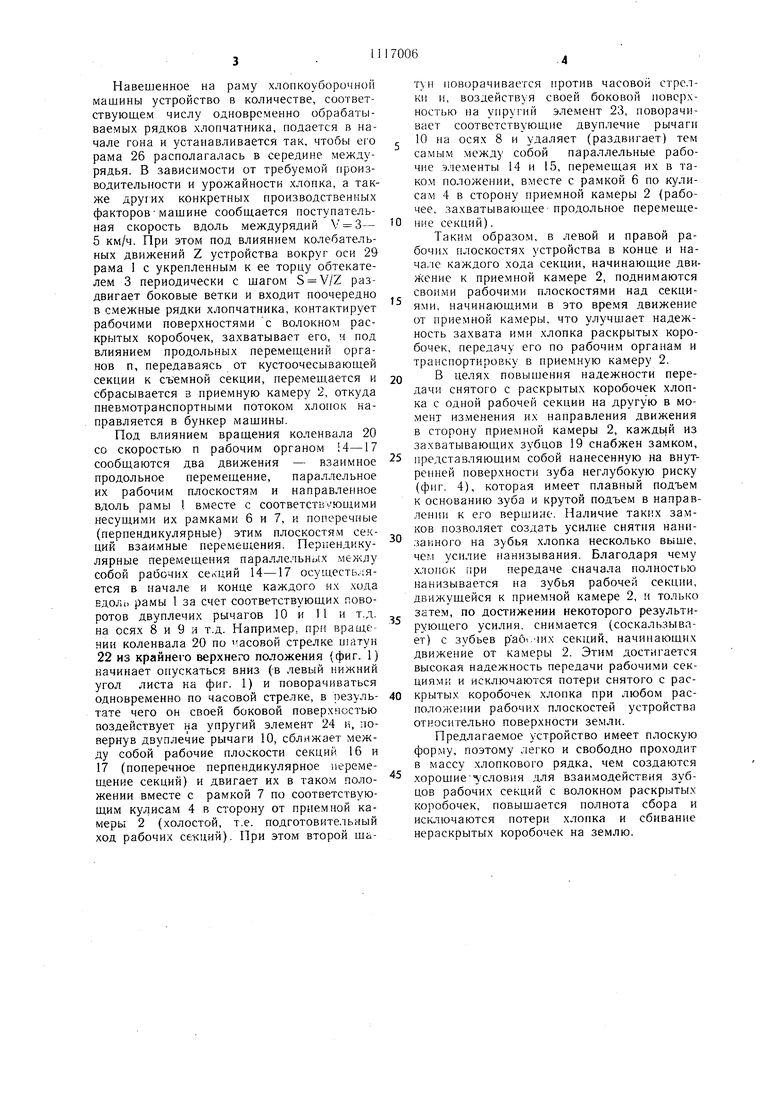
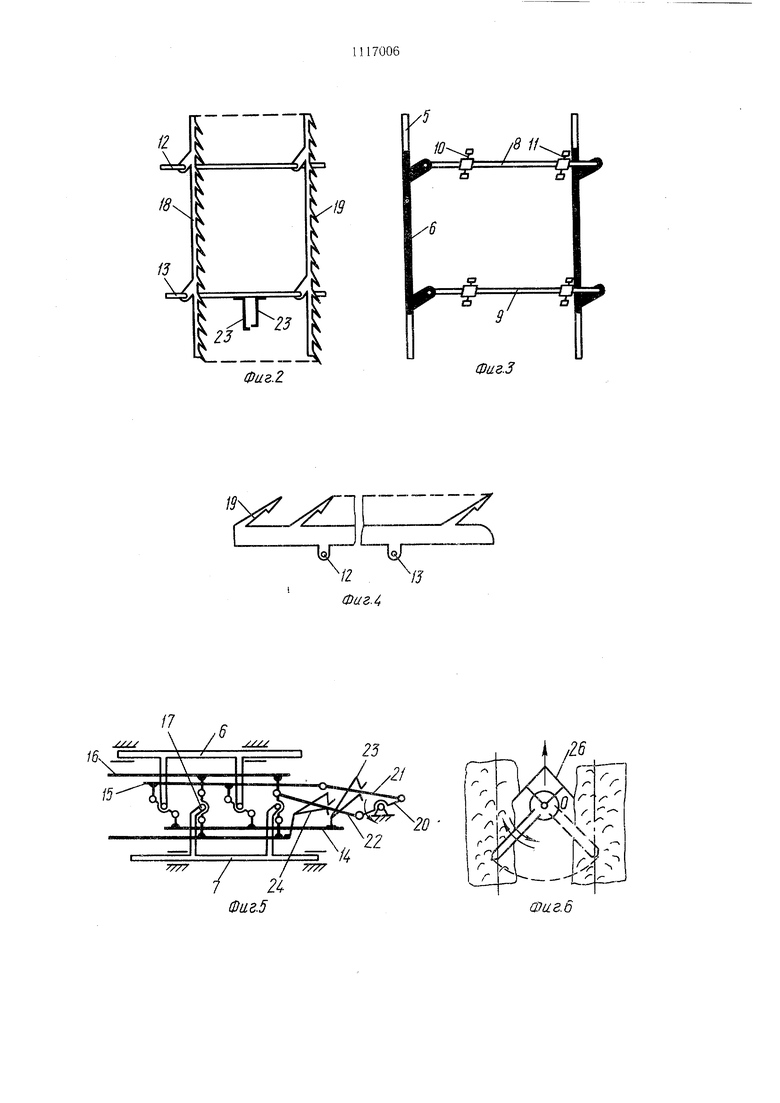
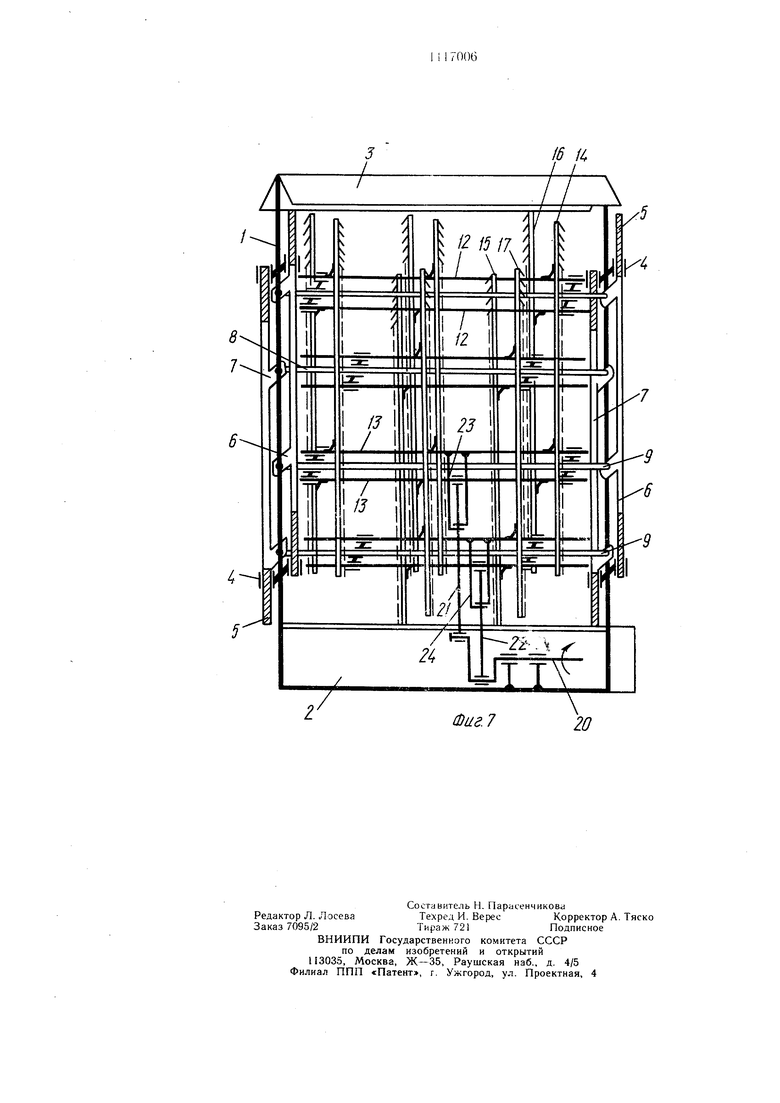
На фиг. 1 показано устройство для уборки хлопка, общий вид; на фиг. 2 - рабочие органы, общий вид; на фиг. 3 - несущая рамка, общий вид; на фиг. 4 - захватывающий элемент (гребенка), общий вид; на фиг. 5 - схема привода рабочих органов; на фиг. 6 - устройство в междурядье, вид сверху; на фиг. 7 - общая схема устройства, вид сбоку.
Устройство для уборки хлопка состоит из жесткой прямоугольной рамы 1, к которой прикреплены приемная камера 2, обтекатель 3 и восемь соосно параллельных кулис 4, в которых соответствующими ползунами 5 с возможностью скольжения в параллельных плоскостях установлены рамки 6 и 7, несущие зубчатые рабочие органы, включающие параллельно расположенные кустоочесыватели и съемники.
Рамки 6 и 7 идентичны по конструкции (фиг. 3) и состоят каждая из двух брусьев, которые жестко соединены между собой взаимно параллельными осями 8 и 9 и содержат по торцам четыре соосно параллельных между собой ползуна 5. На каждой из осей несущих рамок б и 7 с возможностью поворота посажены средними щарнирами по два двуплечих рычага 10 и И, через щарниры плеч которых с возможностью поворота посажены оси 12 и 13 четырех рабочих органов I4--17 - кустоочосывателей и съемников. Каждый из рабочих органов выполнен в виде жесткой рамки, образованной .двумя осям.ч 12 и 13. к которым по длине жестко с щагом и перпен дикулярно укреплены захватывающие элементы 18, образующие собой рабочую по верхность (плоскость) секции (фиг. 2). Все захватывающие элементы 18 идентичны по конструкции и выполнены в виде тонкой пластины (гребенки), содержащей острые зубья 19 с замками.
.. В собранном виде захватывающие элементы рабочего органа 15 чередуются по вертикали с захватывающими элементами рабочего органа 16 и образуют правую (на фиг. 1 обращенную к правому рядку хлопчатника), а элементы органа 14 чере0 дуются с элементами рабочего органа 17 и образуют левую (обращенную на фиг. 1 к левому рядку хлопчатника) рабочие поверхности. При этом зубцы всех рабочих секций наклонены в сторону приемной камеры 2, в которой изолировано от внутренней ее среды расположен привод рабочих органов 14-17, осуществляющий взаи.мные возвратно-поступательные перемещения их вдоль рамы 1 и выполненный в виде кривощипно-щатунного механизма, включаюQ щего коленчатый вал 20 и два шатуна 21 и 22, верхние 1оловки которых щарнирно соединены соответственно с рабочими органа.ми 15 и 16.
Устройство поперечного смещения рабо чих орга.нов выполнено в виде упругих элементов 23 и 24, которые своими упорами охва тывают соответственно шатуны 21 и .22 в
плоскости их поворота и жестко укреплены к соответствующим рабочим органам 14 и 17. К приемной камере укреплена ось 25, которой она с возможностью повороте поca-i -.a в подщипниках ра.мы-обтекателя 26 хлопкоуборочной .магцины. В рабочем СОСТОЯНИЙ устройство для уборки хлопка распо.лагается в середине .-«еждурядья,
между смежными рядками хлопчатника.
Устройство для уборки хлопка (фиг. 6) навешивается на ра.му 26 хлопкоуборочной машины с возможностью поворота и при работе продвигаечся вдоль междурядья между рядками хлопчатника. Одновременнс
0 с этим рамой 1 задаются колебания вокруг оси 25, например, с частотой 10 колебаний в секунду и а.мплитудой 80°, обеспечивиющей в крайних точках колебаний переход обтекателя 3 за центры рядков, а коленчатому валу 20 сообщается вращение со ско5 ростью, например, 34 об./с.
Устройство дли уборки ХЛОПК.Ч работае: следующи.м образом.
Навешенное на раму хлопкоуборочной машины устройство в количестве, соответствуюыдем числу одновременно обрабатываемых рядков хлопчатника, подается в начале гона и устанавливается так, чтобы его рама 26 располагалась в середине междурядья. В зависимости от требуемой производительности и урожайности хлопка, а также других конкретных производственных факторов машине сообщается ностунательная скорость вдоль междурядий V 3- 5 км/ч. При этом под влиянием колебательных движений Z устройства вокруг оси 29 рама с укрепленным к ее торцу обтекателем 3 периодически с шагом S V/Z раздвигает боковые ветки и входит поочередно в смежные рядки хлопчатника, контактирует рабочими поверхностями с волокном раскрытых коробочек, захватывает его, и под влиянием продольных перемещений органов п, передаваясь от кустоочесывающей секции к съемной секции, перемещается и сбрасывается з приемную камеру 2, откуда пневмотранспортными потоком хлопок направляется в бункер мащины.
Под влиянием вращения коленвала 20 со скоростью п рабочим органом 4-17 сообщаются два движения - взаимное продольное перемещение, параллельное их рабочим плоскостям и направленное вдоль рамы I вместе с соотБетст1:-хющ,ими несущими их рамками 6 и 7, и поперечные (перпендикулярные) этим плоскостям секций взаимные перемещения. Перпендикулярные перемещения параллельных между собой рабочих секций 14-17 осущестЕ%-:яется в начале и конце каждого их хода вдоли рамы I за счет соответствующих поворотов двуплечих рычагов 10 и П и т.д. на осях 8 и 9 и т.д. Например, пр.ч враш,е НИИ коленвала 20 по часовой стрелке шатун 22 из крайнего верхнего положения (фиг. 1) начинает опускаться вниз (-в левый нижний угол листа на фиг. 1) и поворачиваться одновременно по часовой стрелке, в результате чего он своей боковой поверхностью воздействует на упругий элемент 24 и, повернув двуплечие рычаги 10, сближает между собой рабочие плоскости секций 16 и 17 (поперечное перпендикулярное перемещение секций) и двигает их в таком положении вместе с рамкой 7 по соответствующим кулисам 4 в сторону от приемной камеры 2 (холостой, т.е. подготовительный ход рабочих секций). При этом второй шатун поворачивается против часовой стрелки и, воздействуя своей боковой новер.хностью на упругий элемент 23, поворачивает соответствуюц ие двуплечие рычаги 10 на осях 8 и удаляет (раздвигает) тем самым между собой параллельные рабочие элементы 14 и 15, перемещая их в таком положении, вместе с рамкой 6 по кулисам 4 в сторону приемной камеры 2 (рабочее, захватывающее продольное перемещение секций).
Таким образом, в левой и правой рабочих плоскостях устройства в конце и нача.че каждого хода секции, начинающие движение к приемной камере 2, поднимаются своими рабочими плоскостями над секциями, начинающими в это время движение от приемной камеры, что улучшает надежность захвата ими хлопка раскрытых коробочек, передачу его по рабочим органам и транспортировку в приемную камеру 2.
В целях повышения надежности передачи снятого с раскрытых коробочек хлопка с одной рабочей секции на другую в момент изменения их направления движения в сторону приемной камеры 2, каждь1Й из захватывающих зубцов 19 снабжен замком, представляющим собой нанесенную на внутренней поверхности зуба неглубокую риску (фиг. 4), которая имеет плавный подъем к основанию зуба и крутой подъем в направлении к его вершине. Наличие таких замков позволяет создать усилие снятия нанизанного на зубья хлопка несколько выше, чем усилие нанизывания. Благодаря чему хлопок при передаче сначала полностью нанизывается на зубья рабочей секции, движушейся к приемной камере 2, н только затем, по достижении некоторого результирующего усилия, снимается (соскальзывает) с зубьев рабг-чих секций, начинающих движение от камеры 2. Этим достигается высокая надежность передачи рабочими секциями и исключаются потери снятого с раскрытых коробочек хлопка при любом расположении рабочих плоскостей устройства относительно поверхности земли.
Предлагаемое устройство имеет плоскую форму, поэтому легко и свободно проходит в массу хлопкового рядка, чем создаются хорошие л-словия для взаимодействия зубцов рабочих секций с волокном раскрытых коробочек, повышается полнота сбора и исключаются потери хлопка и сбивание нераскрытых коробочек на землю.
Фаг2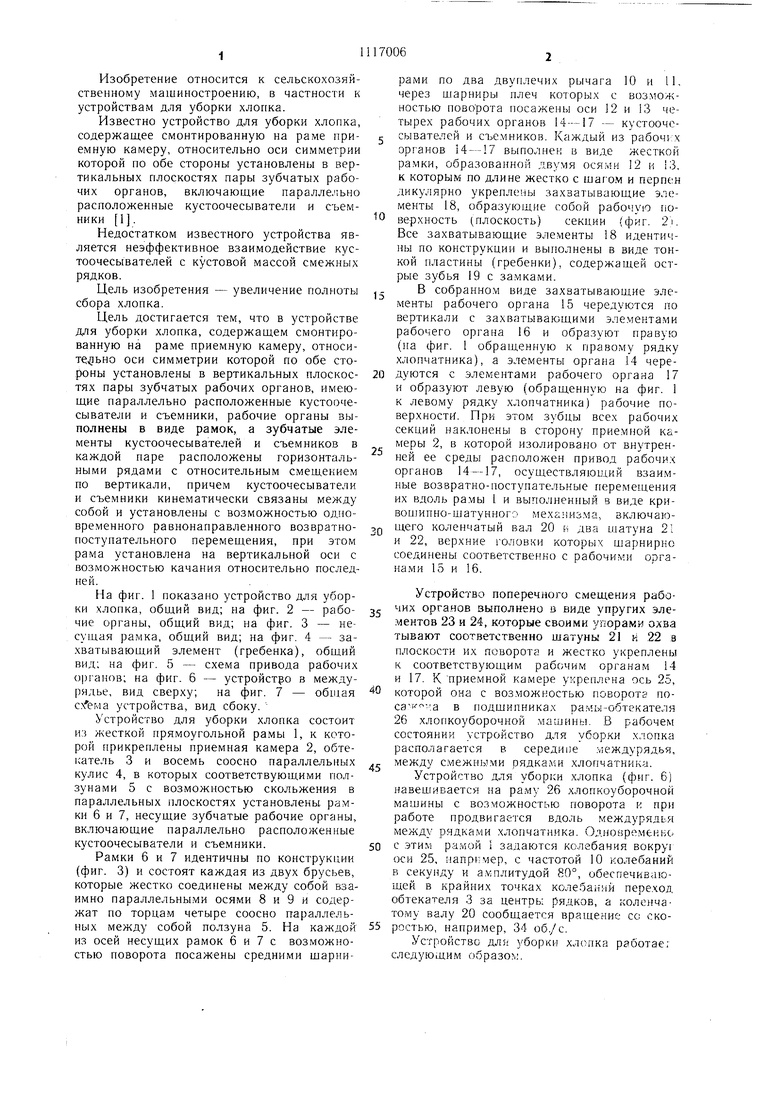
| название | год | авторы | номер документа |
|---|---|---|---|
| Хлопкоуборочный аппарат | 1982 |
|
SU1127540A1 |
| Хлопкоуборочный аппарат | 1986 |
|
SU1423042A1 |
| Хлопкоуборочный аппарат | 1984 |
|
SU1202512A1 |
| Хлопкоуборочный аппарат | 1986 |
|
SU1545994A1 |
| Рабочий орган для уборки хлопка с кустов хлопчатника | 1985 |
|
SU1335169A1 |
| Хлопкоуборочный аппарат Т.Т.Халикова | 1988 |
|
SU1664161A1 |
| Хлопкоуборочный аппарат | 1990 |
|
SU1789111A1 |
| Хлопкоуборочный аппарат | 1982 |
|
SU1107783A1 |
| ХЛОНКОУБОРОЧНЬШ АППАРАТ^*51Г»у'Г? i•5••'!•;^; ~ПТ(^|Фугш cK.u.^uhul | 1972 |
|
SU435784A1 |
| Хлопкоуборочный аппарат | 1986 |
|
SU1338803A2 |
УСТРОЙСТВО ДЛЯ УБОРКИ ХЛОПКА, содержащее смонтированную на раме приемную камеру, относительно оси симметрии которой по обе стороны установлены в вертикальных плоскостях пары зубчатых рабочих органов, имеющие параллельно расположенные кустоочесыватели и съемники, отличающееся тем, что, с целью увеличения полноты сбора хлопка за счет эффективного контакта кустоочесывателей с кустовой массой смежных рядков, рабочие органы выполнены в виде рамок, а зубчатые элементы кустоочесывателей и съемников в каждой паре располол ены горизонтальными рядами с относительным смещением по вертикали, причем кустоочесыватели и съемники кинематически связаны между собой и установлены с возможностью одновременного равнонаправленного возвратно-поступательного перемещения, при этом рама установлена на вертикальной оси с возможностью качания относительно последней. (Л о о Gi
ЪГЪГ
Фиг. 6
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Машина для сбора хлопка | 1929 |
|
SU21569A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
