(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Хлопкоуборочный аппарат | 1982 |
|
SU1127540A1 |
| Подвеска рабочего органа хлопкоуборочного аппарата | 1986 |
|
SU1371589A1 |
| Рабочий орган хлопкоуборочного аппарата | 1986 |
|
SU1491387A1 |
| "Хлопкоуборочная машина "Сауле" | 1989 |
|
SU1819525A1 |
| Хлопкоуборочный аппарат | 1986 |
|
SU1428266A1 |
| Способ дефолиации хлопчатника и устройство для его осуществления | 1989 |
|
SU1727762A1 |
| ХЛОПКОУБОРОЧНЫЙ АППАРАТ ЗАКИРОВА | 1991 |
|
RU2030853C1 |
| Хлопкоуборочный аппарат | 1986 |
|
SU1545994A1 |
| Рабочий орган хлопкоуборочной машины | 1941 |
|
SU68691A1 |
| Пневматический аппарат для обработки кустов хлопчатника | 1980 |
|
SU1007589A1 |
Изобретение относится к сельскохозяйственному машиностроению и позволяет уменьшить механические нагрузки на рабочие органы хлопкоуборочного аппарата и кусты хлопчатника. Рабочие органы, например 14, 15, 10,каждого вертикального ряда, установлены со смещением га относительно рабочего органа, установленного под ним, в противоположную перемещению аппарата сторону, при этом величина m принимается равной частному от деления горизонтального шага t размещения рабочих органов в горизонтальных рядах на число i горизонтальных рядов. 3 ил.
«t
// / У /W / /V /V /Vr /y Л 777
Фиг.1
со
()
ел to
О5
14)
Изобретение относится к сельско- хозяйстненному машиностроению, может быть использовано в уборочных аппаратах хлопкоуборочных магшн и ярляется яополнительньп 1 к изобретению по .cB. 1127540.
Целью изобретения является уменьшение механических нагрузок на кусты хлопчагника и рабочие органы.
На фнг.1 изображен предлагаемый хлопкоуборочный аппарат, вид сбоку; на фиг.2 - то же, вид спереди; на фиг.З - схема взаимодействия рабочих органов со стеблями куста хлоп- четника.
Хлопкоуборочный аппарат состоит из полого коллектора 1, который подвешен к раме 2 хлопкоуборочной машины., дви ;у1 ;ейся с продольной V ско- ростью вдоль рядов хлопчатника. Внури коллектора 2 свободно размещен с возможностью возвратно-поступательного перемещения по его направляющи в направлении, поперечном продольно му перемещению аппарата, с частотой Z патрубок 3 системы пневмоотсоса. В коллекторе I и патрубке 3 имеются сквозные окна 4 и 5 по числу рабочих органов 6, которые вьтолнены в виде пластин с хлопкозахватьшающими элементами 7 и упругими стойками 8. Рабочие органы 9-11 являются дублирующими и образуют собой верхний горизонтальный ряд с горизонтальным шагом t, органы 12 - 14 - второй горизонтальный ряд, и т.д., с тем же горизонтальным шагом t. Все горизонтальные ряды с общим числом i (на чертеже их 6, т.е.) расположены между собой с вертикальным шагом размещения t2 и равными зазорами k.Bce рабочие органы 6 размещены горизонтальными рядами i и укреплены стойками 8 на патрубке 3 пневмоотсоса т так, что рабочий орган каждого вертикального ряда установлен со смещением m относительно рабочего органа, размещенного под ним. Например, если через рагочие органы 9 и 10 f (расположенну.;, как указано выше, между собо с горизонтальным шагом размещени/1 с) верхнего горизонтального ряда горазованного рабочими органами 9, J J и 11) провести вертикали к поверхности земли, т.е. к нижней кромке аппарата .), то один рабочий орган из каждого горизонтального ряда i будет размещен этими
вертикалями, т.е. внутри и равномерно по длине шага с. Следовательно, рабочие органы, взятые по одному из каждого горизонтального ряда, размещены внутри горизонтального шага t г новым между собой, шагом , причем рабочие органы внутри шага t размешены с шагом m не менее чем через один горизонтальный ряд. Например, на фиг.1 показано размещение рабочих органов с шагом m через один горизонтальный ряд (рабочие органы 10, 15 и 16 взяты по одному через один горизонтальный ряд). Это создает на длине шага t три наклоненных к горизонтали под углом об ряда, два из которых начинаются рабочими органами 9 и 10 (чередующимися с щагом с) верхнего горизонтального ряда, а третий - рабочим органом 13 (фиг.1) и расположен с горизонтальным шагом t, t/2. от первых двух, т.е. между ними. При этом наибольший угол наклона cv. к горизонтали (а следовательно, и наиболее опасный с точки зрения одновременногЪ взаимодействия рабочих органов с центральным стеблем 1 имеет ряд, образованный рабочими органами 10, 15 и 16, и все остальные параллельные ему ряды. Все эти ряды расположены по диагоналям прямоугольников одна сторона которых равна половине продольного шага размещения рабочих органов в горизонтальных рядах t, t/2, а другая - высоте аппарата по крайним верхнему 10 и нижнему 17 рабочим органам (крайним в аппарате горизонтальных рядов, откуда и название данного способа размещения - диагонально- шаговое, при котором наклонные ряды рабочих органов направлены по диагоналям внутри каждого шага - шаговым диагоналям). Угол наклона шаговых диагоналей об направлен в сторону, противоположную направлению продольного перемещения аппарата, что улучшает условия взаимодействия с боковыми ветками или стеблями 18 растений хлопчатника. Таким образом, предлагаемое размещение рабочих органов полностью исключает образование ими вертикальных рядов, что и отличает его от известных способов размещения.
Хлопкоуборочный аппарат работает следующим образом.
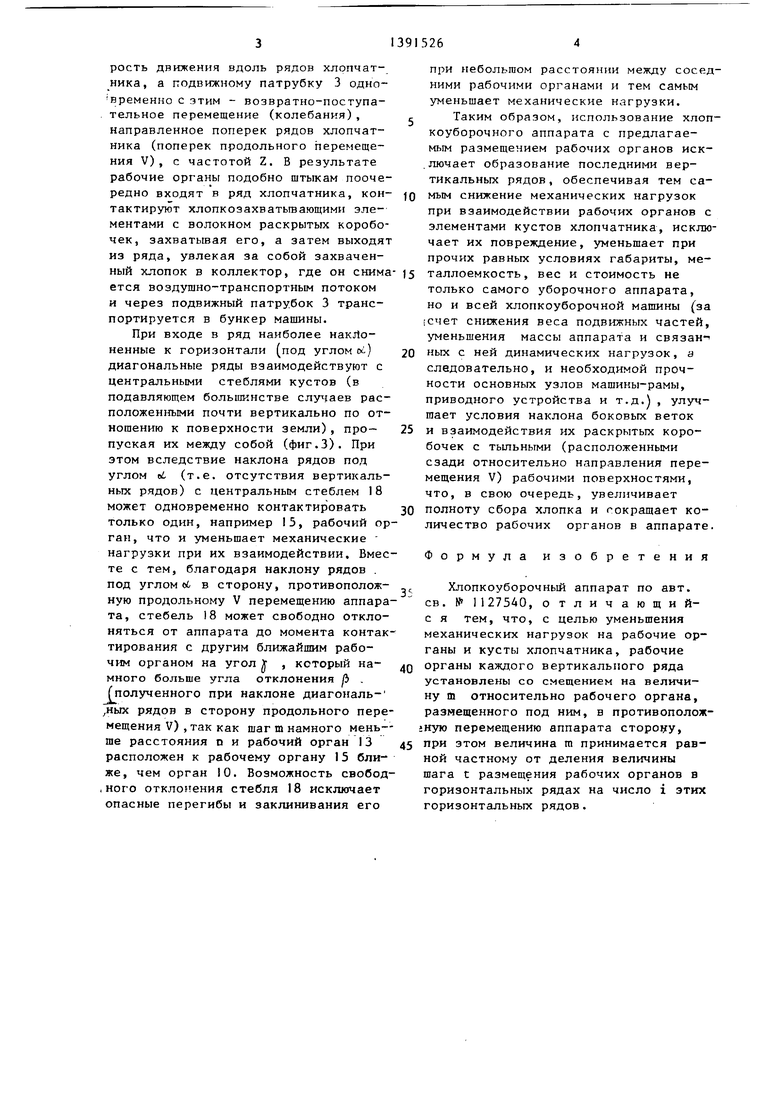
Аппарату вместе с хлопкоуборочной млпиной задается продольная V скорость движения вдоль рядов хлопчатника, а подвижному патрубку 3 одно временно с этим - возвратно-поступательное перемещение (колебания), направленное поперек рядов хлопчатника (поперек продольного перемещения V), с частотой Z. В результате рабочие органы подобно штыкам поочередно входят в ряд хлопчатника, контактируют хлопкозахватьгоающими элементами с волокном раскрытых коробочек, захватьшая его, а затем выходят из ряда, увлекая за собой захваченный хлопок в коллектор, где он снимается воздушно-транспортным потоком и через подвижный патрубок 3 транспортируется в бункер машины.
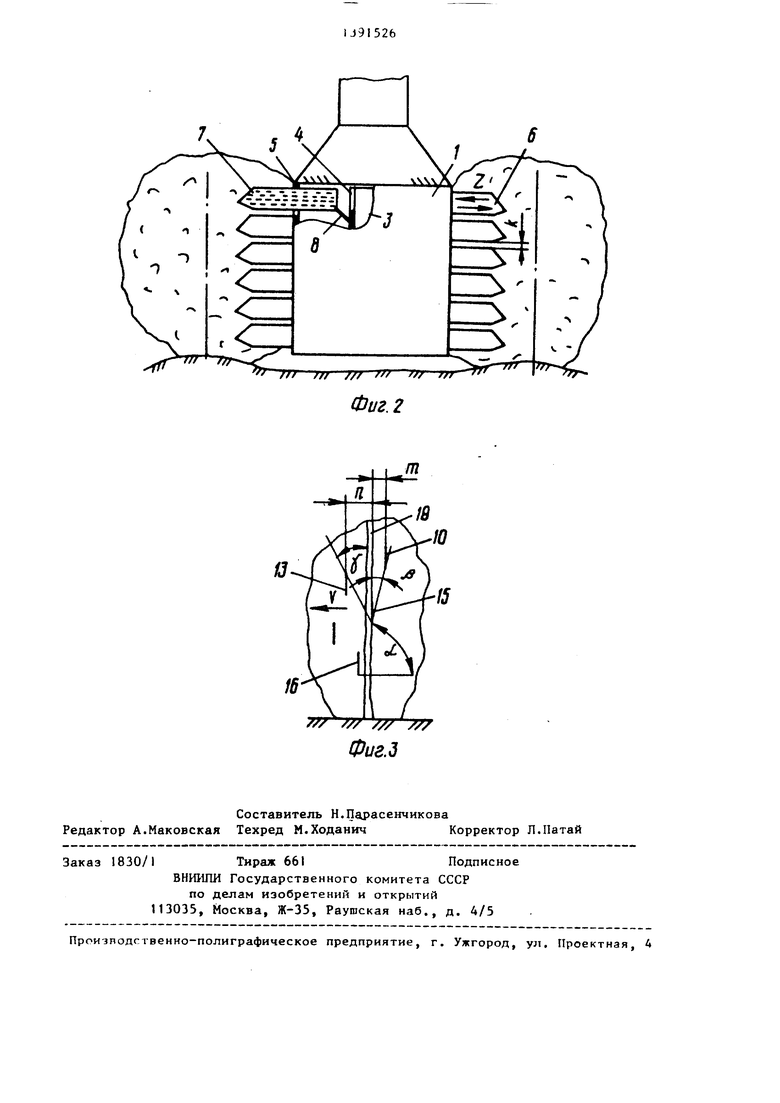
При входе в ряд наиболее накЛо- ненные к горизонтали (под углом ы) диагональные ряды взаимодействуют с центральными стеблями кустов (в подавляющем большинстве случаев рас- положенньми почти вертикально по отношению к поверхности земли), пропуская их между собой (фиг.З). При этом вследствие наклона рядов под углом ei. (т.е. отсутствия вертикальных рядов) с центральным стеблем 18 может одновременно контактировать только один, например 15, рабочий орган, что и уменьшает механические нагрузки при их взаимодействии. Вместе с тем, благодаря наклону рядов . под углом ct в сторону, противоположную продольному V перемещению аппарата, стебель 18 может свободно отклоняться от аппарата до момента контак тирования с другим ближайшим рабочим органом на угол J , который намного больше угла отклонения jb . (полученного при наклоне диагональ- ных рядов в сторону продольного перемещения V) , так как шаг m намного мень-- ше расстояния п и рабочий орган 13 расположен к рабочему органу 15 ближе, чем орган 10. Возможность свобод- .ного отклонения стебля 18 исключает опасные перегибы и заклинивания его
при небольшом расстоянии между соседними рабочими органами и тем самым уменьшает механические нагрузки. Таким образом, использование хлопкоуборочного аппарата с предлагаемым размещением рабочих органов исключает образование последними вертикальных рядов, обеспечивая тем саMbiM снижение механических нагрузок при взаимодействии рабочих органов с элементами кустов хлопчатника, исключает их повреждение, уменьшает при прочих равных условиях габариты, металлоемкость, вес и стоимость ие только самого уборочного аппарата, но и всей хлопкоуборочной машины (за Счет снижения веса подвижных частей, уменьшения массы аппарата и связанных с ней динамических нагрузок, а следовательно, и необходимой прочности основных узлов машины-рамы, приводного устройства и т.д. , улучшает условия наклона боковых веток
и взаимодействия их раскрытых коробочек с тыльными (расположенными сзади относительно направления перемещения V) рабочими поверхностями, что, в свою очередь, увеличивает
полноту сбора хлопка и сокращает количество рабочих органов в аппарате.
Формула изобретения
Хлопкоуборочный аппарат по авт. св. № 1127540, отличающий- с я тем, что, с целью уменьшения механических нагрузок на рабочие органы и кусты хлопчатника, рабочие
органы каждого вертикального ряда установлены со смещением на величину m относительно рабочего органа, размещенного под ним, в противополож- гную перемещению аппарата cTopoiyy,
при зтом величина га принимается равной частному от деления величины шага t размещения рабочих органов в горизонтальных рядах на число i этих горизонтальных рядов.
ff V
Фиг.д
Фиг. 2
| Хлопкоуборочный аппарат | 1982 |
|
SU1127540A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
