Изобретение относится к сельскохозяйственному машиностроению.
Известны хлопкоуборочные аппараты, содержащие образующие рабочую щель парные рабочие органы, закрепленные на рычагах, связанных с рамой аппарата пространственными шарнирами, и шарнир«о соединенные между собой механизмом регулировки рабочей щели.
Однако в таких аппаратах соединение рабочих органов с каркасом не позволяет обеспечить индивидуальное копирование грядок по высоте непосредственно каждой рамкой щпиндельных барабанов. Регулирование положения аппаратов по высоте производится гидравликой с места водителя, при этом опускается и поднимается весь аппарат целиком.
Кроме того, в известных аппаратах между парноработающими рамками установлены упоры, закрепленные на каркасе аппарата и обеспечивающие заданный зазор между смежными шпиндельными барабанами, но «е позволяющие осуществлять поперечную копировку аппаратом рядка хлопчатника.
Целью изобретения является увеличение полноты сбора хлопка-сырца за счет пространственного копирования каждым рабочим органом профиля гребпя рядка хлопчатника и обеспечение плоскопараллельного перемещения рабочих органов.
Для этого в предлагаемом хлопкоуборочном аппарате рабочие органы прикреплены к рычагам и механизму регулировки рабочей щели пространственными шарнирами и шарнирно соединены с рамой аппарата дополнительными рычагами, образующими совместно € основными, рамой и рабочими органами щарнирный параллелограмчм.
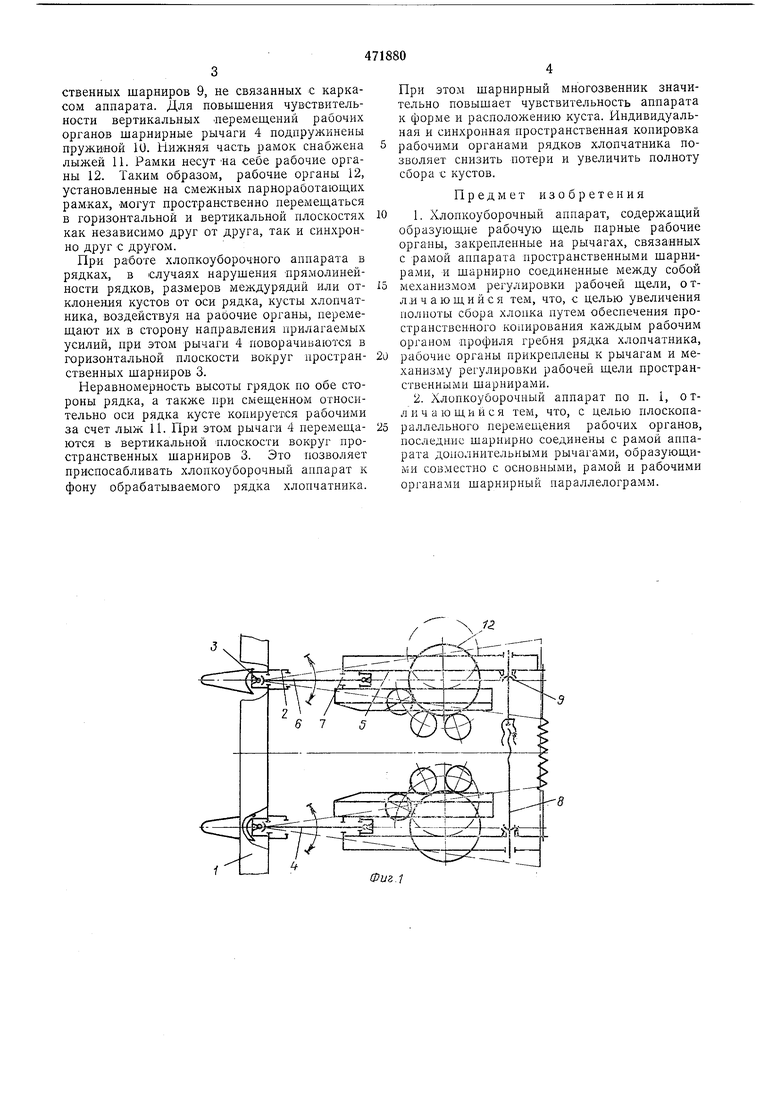
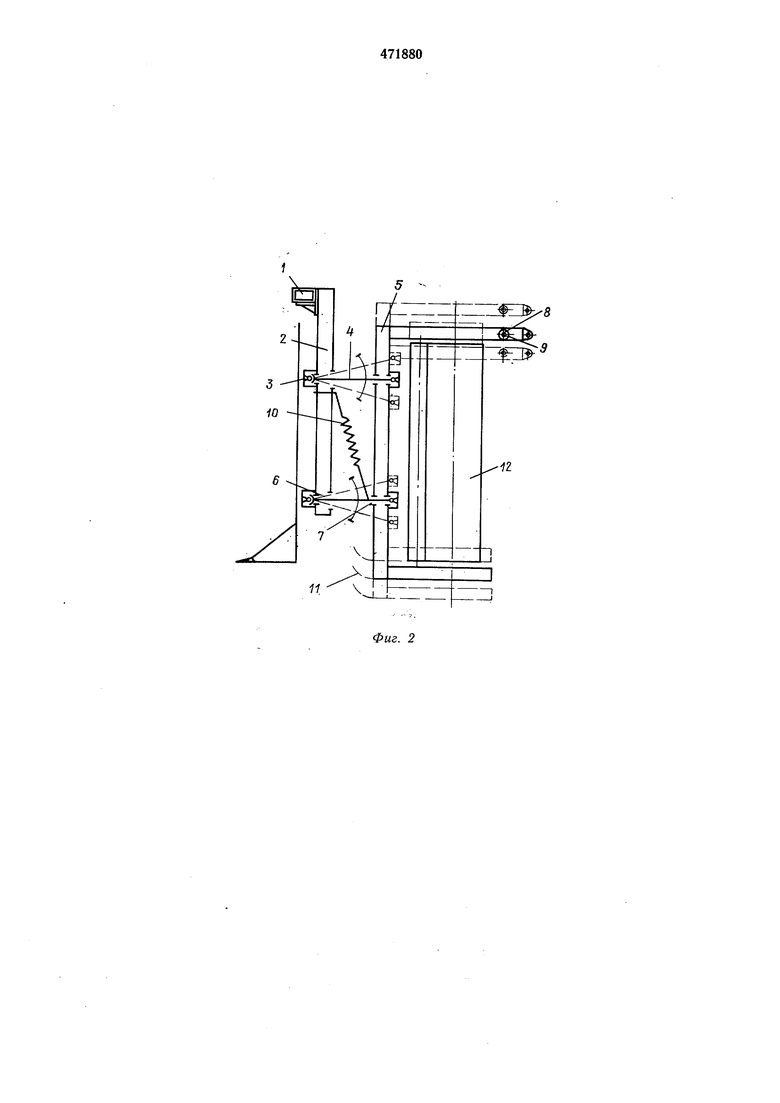
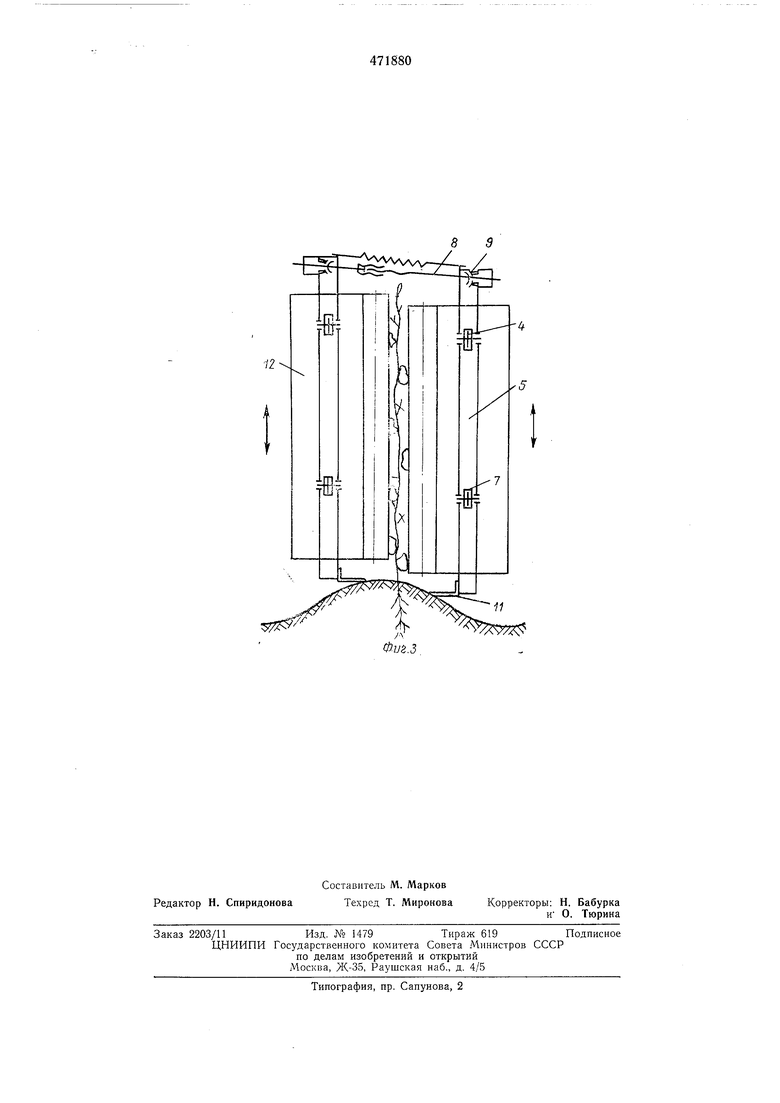
На фиг. 1 схематично изображен предлагаемый хлопкоуборочный аппарат, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, Вид сверху.
На каркасе 1 аппарата с вертикальными стойками 2 через пространственные щарниры 3 закреплены шарнирные рычаги 4. На противоположных концах рычагов 4 шарнирно закреплена рамка 5 барабана. Таким образом, стойка 2, шарнирные рычаги 4 и рамка 5 образуют параллелограммную подвеску, расположенную в вертикальной плоскости. Этот параллелограмм может колебаться в горизонтальной плоскости вокруг шарнира 3.
Вертикальные и горизонтальные колебания параллелограмма ограничены в определенных пределах, напрцмер, стенками пазов б и 7, выполненных соответственно в стойке 2 и рамке 5. Смежные парноработающие рамки связаны между собой замыкающим, регулируемым по длине, подпрул иненным звеном 8, соединенным с рамками посредством простран
ственных шарниров 9, не связанных с каркасом аппарата. Для повышения чувствительности вертикальных леремеш,ений рабочих органов шар-нирные рычаги 4 подпружинены пружииой 10. Нижняя часть рамок снабжена лыжей 11. Рамки несут на себе рабочие органы 12. Таким образом, рабочие органы 12, установленные на смежных парноработаюш,их рамках, могут пространственно перемещаться в горизонтальной и вертикальной плоскостях как независимо друг от друга, так и синхронно друг с другом.
При работе хлопкоуборочного аппарата в рядках, Б случаях нарушения прямолинейности рядков, размеров междурядий или отклонения кустов от оси рядка, кусты хлопчатника, воздействуя на рабочие органы, перемеш,ают их в сторону направления прилагаемых усилий, при этом рычаги 4 поворачиваются в горизонтальной плоскости вокруг пространственных шарниров 3.
Неравномерность высоты грядок по обе стороны рядка, а также при смеш,енном относительно оси рядка кусте копируется рабочими за счет лыж 11. При этом рычаги 4 перемещаются в вертикальной ллоскости вокруг простраиственных шарниров 3. Это позволяет приспосабливать хлопкоуборочный аппарат к фону обрабатываемого рядка хлопчатника.
При этом шарнирный многозвенник значительно повышает чувствительность аппарата к форме и расположению куста. Индивидуальная и синхронная пространственная копировка рабочими органами рядков хлопчатника позволяет снизить потери и увеличить полноту сбора с кустов.
Предмет изобретения
1. Хлопкоуборочный аппарат, содержащий образующие рабочую щель парные рабочие органы, закрепленные на рычагах, связанных с рамой аппарата пространственными шарнирами, и шарнирно соединенные между собой
механизмом регулировки рабочей щели, отличающийся тем, что, с целью увеличения полноты сбора хлопка путем обеспечения пространственного копирования каждым рабочим органом профиля гребня рядка хлопчатника,
рабочие органы прикреплены к рычагам и механизму регулировки рабочей щели пространственными шарнирами.
2. Хлопкоуборочный аппарат по п. 1, отличающийся тем, что, с целью плоскопараллельного перемещения рабочих органов, последние шарнирио соединены с рамой аппарата дополнительными рычагами, образующими совместно с основными, рамой и рабочими органами щарнирный параллелограмм.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многорядная хлопкоуборочная машина | 1975 |
|
SU553957A1 |
| Механизм регулировки рабочей щели вертикально-шпиндельного хлопкоуборочного аппарата | 1980 |
|
SU917768A2 |
| Хлопкоуборочный аппарат | 1986 |
|
SU1428266A1 |
| Способ дефолиации хлопчатника и устройство для его осуществления | 1989 |
|
SU1727762A1 |
| Копировальное устройство хлопкоуборочного аппарата | 1983 |
|
SU1248554A1 |
| ХЛОПКОУБОРОЧНЫЙ АППАРАТ | 1970 |
|
SU284491A1 |
| Хлопкоуборочный аппарат | 1979 |
|
SU873943A1 |
| ХЛОПКОУБОРОЧНАЯ МАШИНА | 2005 |
|
RU2311748C2 |
| Хлопкоуборочный аппарат | 1981 |
|
SU1085550A1 |
| Хлопкоуборочный аппарат | 1982 |
|
SU1127540A1 |
-I
Фиг Л
Гti: fEi 5
Фиг. 2
IT
7
f
11
Фи&.З
