элементов 6 и 7, датчиков массы 8, 9 и 10, шарниров 11 и стоек 12. Датчики 10 оснащены серьгами для крепления поддерживающих роликов. Каждая серьга оснащена двумя утками для крепления гибких элементов 7. Датчики 8, 9 и 10 при помощи экранированных кабелей 17 электрически соединены с блоком 18 преобразования сигналов датчиков массы животного. Послед72193
НИИ включает в себя сумматор, интегратор, устройство сравнения, формирователь импульсов, схему И-НЕ, счетчик импульсов, преобразователь кода, цифровой индикатор, кварцевый генератор, делитель частоты и устройство управления, которые имеют между собой определенную электрическую взаимосвязь. I з.п. ф-лы, 6 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ АЦП МНОГОРАЗРЯДНЫХ ПРИРАЩЕНИЙ | 2016 |
|
RU2619887C1 |
| Устройство для передачи и приема телеметрической информации | 1986 |
|
SU1397956A1 |
| Устройство для контроля дорожных одежд | 1987 |
|
SU1700128A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ НАПРЯЖЕНИЯ ПЕРЕМЕННОГО ТОКА В КОД | 2001 |
|
RU2195767C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 1991 |
|
RU2020595C1 |
| Устройство для преобразования напряжения переменного тока в код | 1990 |
|
SU1795543A1 |
| Устройство для измерения массы сыпучих материалов в потоке | 1989 |
|
SU1624272A1 |
| Стабилизатор переменного напряжения | 1988 |
|
SU1534434A1 |
| Телевизионное следящее устройство | 1989 |
|
SU1699013A1 |
| Программно-управляемый генератор синусоидальных колебаний | 1986 |
|
SU1460768A1 |
Изобретение относится к сельскому хозяйству. Цель изобретения - повьшение точности измерения путем устранения влияния движения животного на результаты измерения. Станок для определения массы животных состоит из платформы 4 с опорными роликами 5, Н-образно соединенных гибких . А. -Г7 (Л с 00 10 о: в
1
Изобретение относится к сельскому
хозяйству, в частности к устройствам для стойлового содержания крупного рогатого скота.
Цель изобретения - повышение точ- ности измерения путем устранения влияния движения животного на результаты измерения его массы.
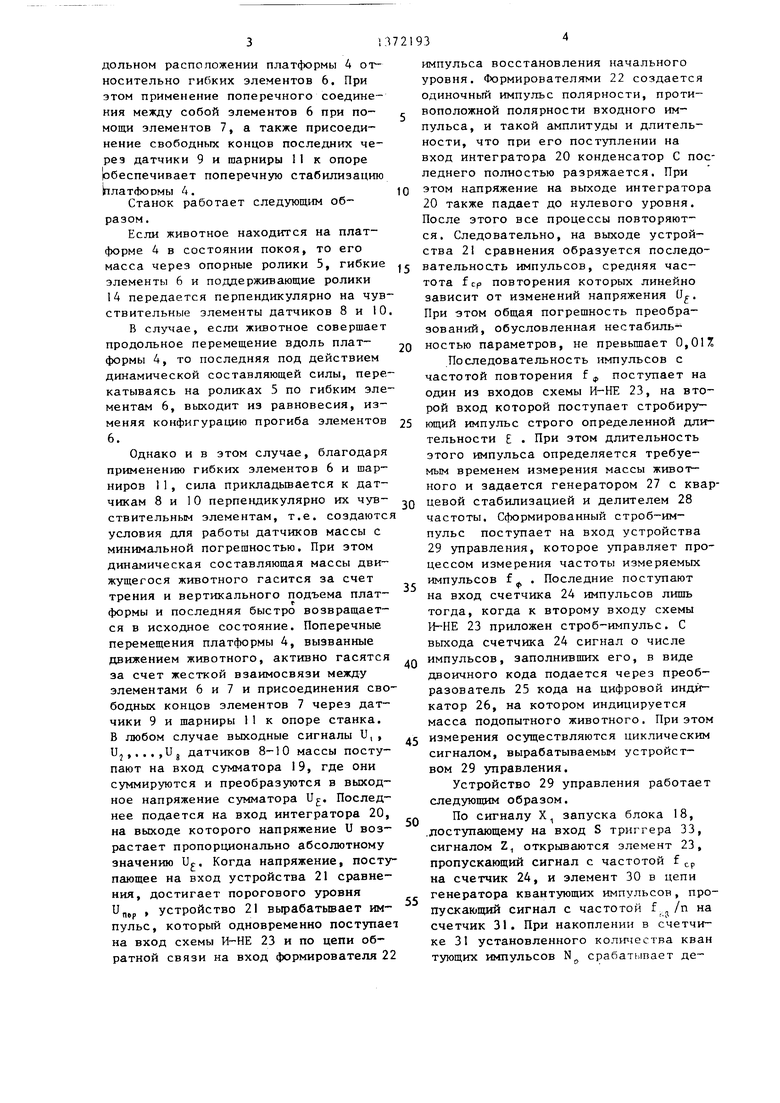
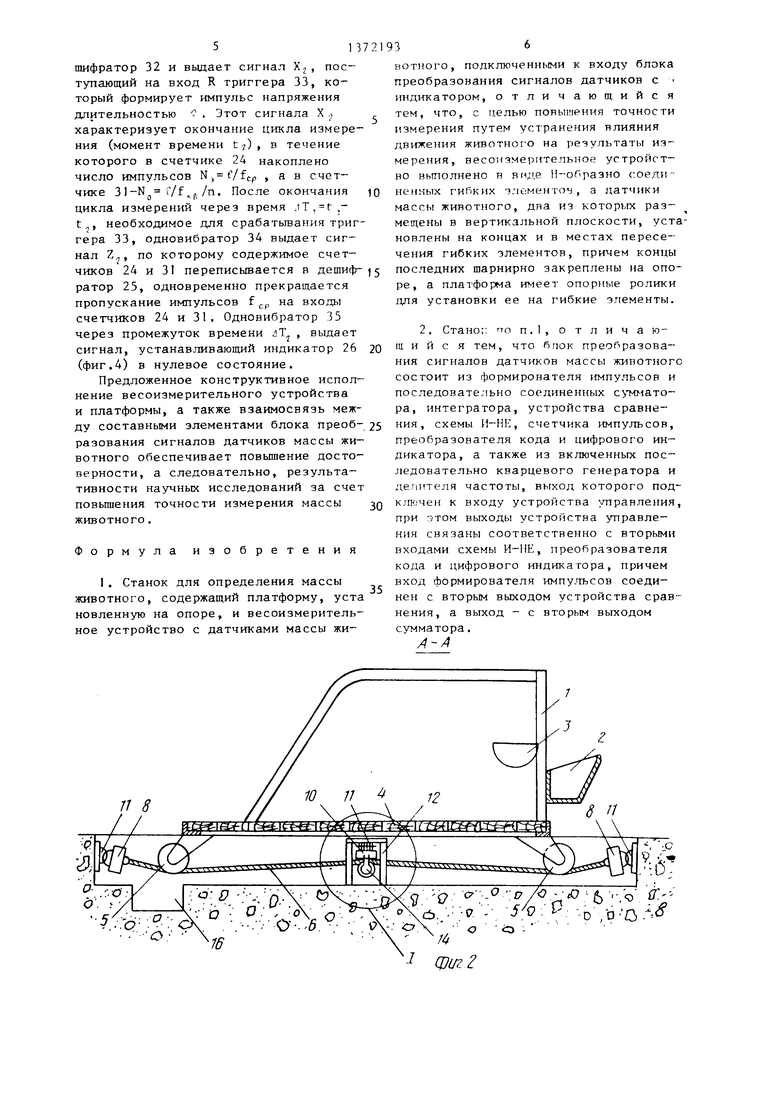
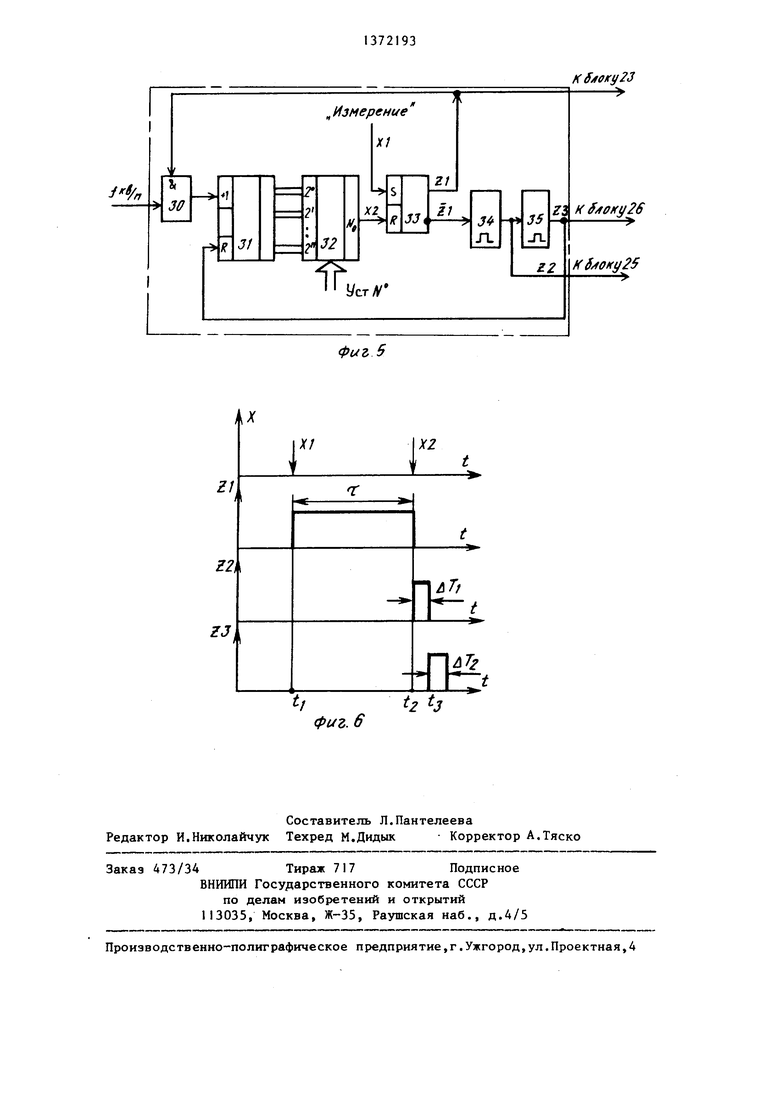
На фиг.1 представлен станок для определения массы животного, вид сверху; на фиг.2 - разрез А-А на фиг.1; на фиг.З - узел I на фиг.2; на фиг.4 - структурная схема блока преобразования сигналов датчиков массы животного; на фиг.З - структурная схема устройства управления; на фиг.6 временные диаграммы работы элементов устройства управления.
Станок для определения массы живо ного состоит из каркаса 1, кормушки 2, поилки 3, платформы 4 с опорными роликами 5, Н-образно соединенных гибких элементов 6 и 7, датчиков 8-10 массы животного, шарниров II и стоек 12. Датчики 10 оснащены серьгами 13 для крепления поддерживающих роликов 14, а каждая серьга 13 оснащена двумя ушками 15 для крепления гибких элементов 7. В задней части станок оснащен желобом 16 для сбора экскрементов, а датчики 8-10 при помощи экранированных кабелей 17 электрически соединены с блоком 18 преобразования сигналов указанных датчиков в цифровую информацию массы подопытного животного. Он может быть расположен непосредственно возле станка или в отдельном помещении.При этом блок 18 (фиг.4) состоит из двух
0
5
0
5
0
электрически взаимосвязанных контуров, один из которых содержит сумматор 19, интегратор 20, устройство 21 сравнения, формирователь 22 импульсов, схему И-НЕ 23, счетчик 24 импульсов, преобразователь 25 кода и цифровой индикатор 26, а второй - кварцевый генератор 27, делитель 28 частоты и устрюйство 29 управления.
Устройство 29 управления (фиг.5) состоит из элементов 30 (схема И), счетчика 31 импульсов, дешифратора 32, триггера 33, двух одновибраторов 34 и 35, формирующих однократные импульсы длительностью Т, и Т, и выполняет следующие функции: формирует строб-импульс длительностью 1 n/f (где п- кратность деления частоты квантования; f - частота квантования), управляет схемой И-НЕ 23,осуществляя пропускание импульсов измеряемой частоты fj-p на вход счетчика 24 импульсов (фиг.4), задает цикл измерения установкой количества квантующих импульсов кварцевого генератора 27 (фиг.4) и управляет работой преобразователя 25 кода (дешифратора).
Применение в станке гибких параллельно расположенных элементов 6, зак{ епленных с прогибом в местах их контакта с роликами 5 и 14 через датчики 8 и 10 массы животного и шарни- ры II на опоре станка, обеспечивает быстрое затухание предельных колебаний платформы 4, вызванных движениями находящегося на ней животного, а также перпендикулярное направление приложения силы к чувствительныь элементам датчиков 8 и 10 при любом про-
дольном расположении платформы А относительно гибких элементов 6, При этом применение поперечного соединения между собой элементов 6 при помощи элементов 7, а также присоединение свободных концов последних че- реэ датчики 9 и шарниры 11 к опоре Обеспечивает поперечную стабилизацию
платформы 4.
Станок работает следующим образом .
Если животное находится на платформе 4 в состоянии покоя, то его масса через опорные ролики 5, гибкие элементы 6 и поддерживающие ролики 14 передается перпендикулярно на чувствительные элементы датчиков 8 и 10
В случае, если животное совершает продольное перемещение вдоль платформы 4, то последняя под действием динамической составляющей силы, перекатываясь на роликах 5 по гибким элементам 6, выходит из равновесия, изменяя конфигурацию прогиба элементов 6.
Однако и в этом случае, благодаря применению гибких элементов 6 и шарниров 11, сила прикладьтается к датчикам 8 и 10 перпендикулярно их чувствительным элементам, т.е. создаютс условия для работы датчиков массы с минимальной погрешностью. При этом динамическая составляющая массы движущегося животного гасится за счет трения и вертикального подъема платформы и последняя быстро возвращается в исходное состояние. Поперечные перемещения платформы 4, вызванные движением животного, активно гасятся за счет жесткой взаимосвязи между элементами 6 и 7 и присоединения свободных концов элементов 7 через датчики 9 и шарниры 11 к опоре станка. В любом случае выходные сигналы U,, Uj,,..,Uj датчиков 8-10 массы поступают на вход сумматора 19, где они суммируются и преобразуются в выходное напряжение сумматора U. Последнее подается на вход интегратора 20, на выходе которого напряжение U возрастает пропорционально абсолютному значению Uc, Когда напряжение, поступающее на вход устройства 21 сравнения, достигает порогового уровня
и
пер
, устройство 21 вьфабатьюает импульс, который одновременно поступает на вход схемы И-НЕ 23 и по цепи обратной связи на вход формирователя 22
0
5
0
5
0
5
0
5
импульса восстановления начального уровня. Формирователями 22 создается одиночный импульс полярности, противоположной полярности входного импульса, и такой амплитуды и длительности, что при его поступлении на вход интегратора 20 конденсатор С последнего полностью разряжается. При этом напряжение на выходе интегратора 20 также падает до нулевого уровня. После этого все процессы повторяются. Следовательно, на выходе устройства 21 сравнения образуется последо- вательноать импульсов, средняя частота ftp повторения которых линейно зависит от изменений напряжения 0. При этом общая погрешность преобразований, обусловленная нестабильностью параметров, не превьшзает 0,01%
Последовательность импульсов с частотой повторения f поступает на один из входов схемы И-НЕ 23, на второй вход которой поступает стробиру- ющий импульс строго определенной длительности . При этом длительность этого импульса определяется требуемым временем измерения массы животного и задается генератором 27 с кварцевой стабилизацией и делителем 28 частоты. Сформированный строб-импульс поступает на вход устройства 29 управления, которое управляет процессом измерения частоты измеряемых импульсов f . Последние поступают на вход счетчика 24 импульсов лишь тогда, когда к второму входу схемы Pf-HE 23 приложен строб-импульс. С выхода счетчика 24 сигнал о числе импульсов, заполнивших его, в виде двоичного кода подается через преобразователь 25 кода на цифровой индикатор 26, на котором индицируется масса подопытного животного. При этом измерения осуществляются циклическим сигналом, вырабатываемым устройством 29 управления.
Устройство 29 управления работает следующим образом.
По сигналу X, запуска блока 18, .поступающему на вход S триггера 33, сигналом Z, открываются элемент 23, пропускающий сигнал с частотой f (.р на счетчик 24, и элемент 30 в цепи генератора квантующих импульсов, пропускающий сигнал с частотой f , /п на счетчик 31. При накоплении в счетчике 31 установленного колугчества кван тующих импульсов N срабатывает де 5.::д-.--:
. - О:
16
г
47 (7- о 5 -Ъ - 4d, .-« -. 5 о ,0-ОЛс
//////////// ////////, фиг.З
Ui
У/
--1
13
29
7 f7oSepHe//Tro
20
Г
и - zi
Unop
Л27
28
Фиг.
Фиг 5
}iz 3
фиг. 6
К SAO к у 23
Zy Kf OKI/26
| Устройство для определения ежесуточного привеса животных | 1982 |
|
SU1067368A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
