Изобретение относится к горной промышленности и может быть использовано в устройствах контроля состояния горных пород, в частности в уст- ройствах, предсказывающих неустойчивые состояния горных пород.
Целью изобретения является повышение надежности контроля.
На фиг.1 изображена структурная схема устройства контроля состояния горных пород; на фиг. 2 - структурная схема блока выборки и запоминания; на фиг. 3 - структурная схема блоков определения текущего и предыдущего значений дисперсий смещений, аналогичных друг другу.
Устройство контроля состояния горных пород включает расположенные в шпуре 1, пройденном в массиве 2 гор- ных пород, реперы 3 и 4, соединенные между собой штангой 5 с измерителем 6 смещений реперов, выход которого соединен с входом блока 7 преобразования сигнала. К входу 8 управления блока 7 преобразования сигнала подключен первый выход времязадающего блока 9, который подключен также к входу 10 управления блока 11 выборки и запоминания значений смещений.Блок
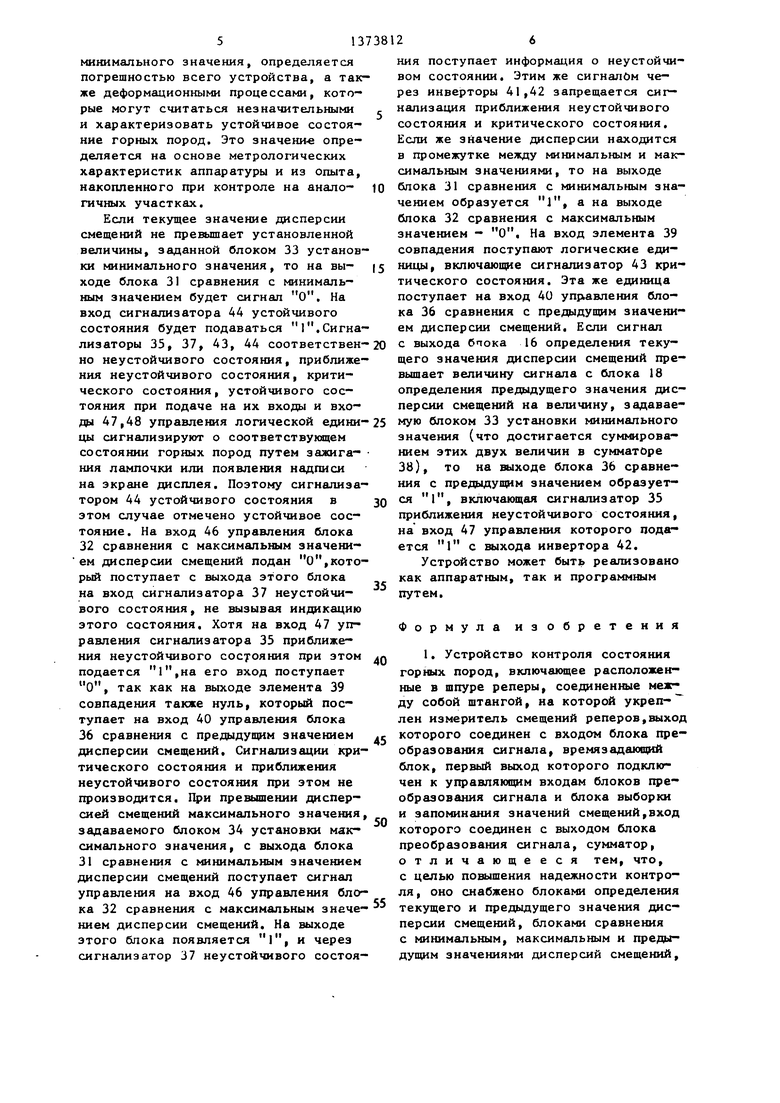
11выборки и запоминания значений смещений содержит ряд регистров 12, соединенных последовательно друг за другом. Входа 13 управления соединены друг с другом через элементы 14 задержки и с входом 10 управления блока 11 выборки и запоминания значений смещений. Каждый из регистров
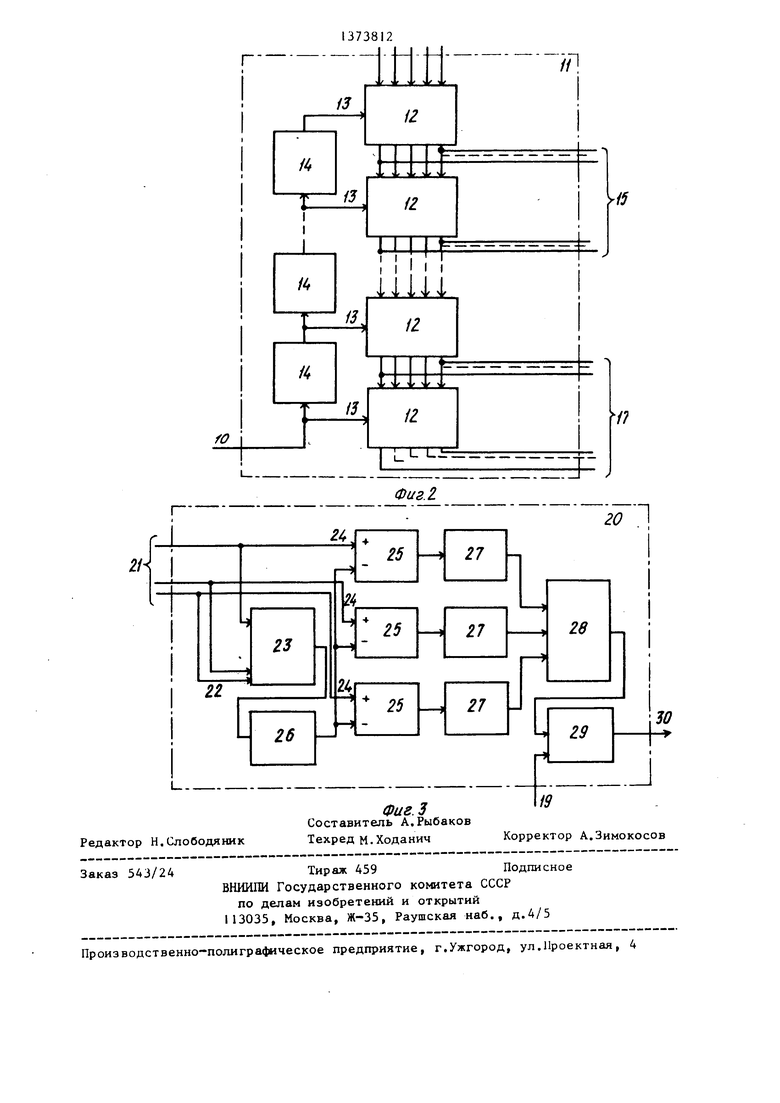
12имеет выход, являющийся одним из выходов блока 11 выборки и запомина- кия значений смещений. Выходы 15 регистров 12 блока 11 выборки и запоминания результатов измерений соединены с входом блока 1Ь определения текущего значения дисперсии смещений, а выходы 17 регистров 12 - с входом блока 18 определения предыдущего значения дисперсии смещений. Вход 19 управления блока 1Ь определения текущего значения дисперсии смещений соединен с вторым выходом времязадающего блока 9. Блоки 16 и 18 определения соответственно текущего и предыдущего значений дисперсий смещений выполнены одинаково и имеют вид блока 20. В них входы 21 соединены с входами 22 сумматора 23 значений смещений и входами 24 блоков 25 вычитания, другие входы которых через блок
.
5
0 5 0
,
Q .,
0
5
2Ь масштабирования соединены с выходом сумматора 23 значений смещений, Выходы блоков 25 вычитания соединены через квадраторы 27 с сумматором 28 квадратов значений смещений и через блок 29 масштабирования с выходом 30 блоков определения текущего 16 и предыдущего 18 значений дисперсий смещений. Вход 19 управления соединен с блоком 29 масштабирования. Блоки сравнения с минимальным 31 и максимальным 32 значениями дисперсий смещений соответственно соединены с блоками установки минимального 33 и максимального 34 значений. Сигнализатор 35 приближения неустойчивого состояния подключен через блок 36 сравнения с предыдущим значением дисперсии смещений к -блоку 16 определения текущего значения дисперсии смещений, блокам сравнения с минимальным 31 и максимальным 32 значениями дисперсий смещений. Сигнализатор 37 неустойчивого состояния соединен с блоком 32 сравнения с максимальным значением дисперсии смещений. Сумматор 38 своим выходом соединен с блоком 36 сравнения с предыдушим значением дисперсии смещений, а выходами - к блоку 18 определения предыдущего значения дисперсии смещений и блоку 31 сравнения с минимальным значением дисперсии смещений. Элемент 39 совпадения своим выходом соединен с входом 40 управления блока 36 сравнения с предыдуш м значением дисперсии смещений. Входы инверторов 41, 42 подключены соответственно к блоку 32 сравнения с максимальным значением дисперсии смещений и сигнализатору 37 неустойчивого состояния, Выходы инверторов подключены соответственно к сигнализатору 35 приближения неустойчивого состояния и через элемент 39 совпадения к сигнализатору 43 критического состояния. Сигнализатор 44 устойчивого состояния через инвертор 45 соединен с элементом 39 совпадения, выхоДом блока 31 сравнения с минимальным значением дисперсии смещений, входом 46 управления блока 32 сравнения с максимальным значением дисперсии смещений. Блоки определения текущего 16 и предыдущего 18 значений дисперсий смещений связаны с выходами 15 и 17 регистров 12 блока 11 выборки и запом11Н. значений смещений. Выход инвертора
42 и блока 31 сравнения с минимальным значением дисперсии смещений соединены соответственно с входами 47 и 48 сигнализатора 35 приближения-«неустойчивого состояния и сигнализатора 37 неустойчивого состояния.
Устройство работает следующим образом.
Времязадающий блок 9 подает сиг- нал на блок 7 преобразования сигнала и блок 1I выборки и запоминания значений смещений. Блок 7 преобразования сигнала преобразует сигнал с измерителя 6 смещений реперов 3, 4 в величину, соответствующую их смещениям в момент измерения. Это может быть, например, преобразование аналогового сигнала (напряжение, частота) в цифровую форму. Кроме того, он может осуществлять масштабирование с учетом базового расстояния между реперами 3 и 4 для последующего оперирования с величинами, соответствующими смещениям в единицах относитель- ных деформаций. Сигнал с выхода бло-г ка 7 преобразования сигнала поступает на вход блока 11 выборки и запоминания значений смещений. После некоторой задержки, определяемой элементами 14 задержки и необходимой для преобразования сигнала, подаются последовательно во времени сигналы управления на входы 13 регистров 12. При этом показания, соответствующие значениям смещений в различные моменты времени, передвигаются последовательно на одну ячейку памяти, а в первый регистр 12 заносится текущее значение смещений. После проведения количества измерений, равного числу регистров 12 в блоке 11 выборки и запоминания значений смещений, и заполнения тем caNfciM всех регистров 12 сигналом с времязадающего блока 9, подаваемым на вход 19 управления блока 16 определения текущего значения дисперсии смещений, разрешается выдача на выходе этого блока. В бло- ках определения текущего 16 и предыдущего 18 значений дисперсий смещений сигналы с выходов регистров 12 подаются на входы 22 сумматора 23 значений смещений.
Бели суммирование производится в аналоговой форме, то каждому значению соответствует одна линия,если в цифровой - то несколько. После суьг мирования значений смещений на выхо-
0
5
0
0
5
5
0
5
0
5
де блока 26 масштабирования с коэффициентом деления, равным числу входов 21, получается среднее значение смещений за время усреднения, охватывающее отсчеты значений смещений,содержащиеся в соответствующих регистрах 12.
После вычитания среднего значения в блоках 25 вычитания из значений смещений, подаваемых на входы 24,возведения во вторую степень в квадраторах 27, суммирования в сумматоре 28 квадратов значений и прохождения через блок 29 масщтабирования с коэффициентом деления, равным числу входов 21, на выходе 30 блоков определения текущего 16 и предыдущего 18 значений дисперсий смещений образуется величина, равная дисперсии смещений за соответствующий промежуток времени. Сигналом, подавае 1м на вход 19 управления блока 16 определения текущего значения дисперсии смещений, можно закоротить выход 30 блоков определения текущего 16 и предыдущего 18 значений смещений, исключая тем самым работу дальнейшей схемы. Блоки сравнения с минимальным 31, максимальным 32 и предыдущим 36 значениями дисперсий смещений имеют входы сравнения, на которые подается сигнал с выхода блока 16 определения текущего значения дисперсии смещений; опорные входы, на I которые подается сигнал с блоков установки минимального 33 и максимального 34 значений и с выхода сумматора 38. Если величина сигнала на входе сравнения превышает величину опорного напряжения, то на выходе блоков 31,32,36 сравнения образуется сигнал I, если же нет - то О. При подаче на входы 40,46 управления 1 на выходе образуется сигнал,соответствующий результату операции сравнения, при подаче О сигнал на выходе равен нулю независимо от результатов сравнения.
При реализации предлагаемого устройства аналоговым способом этот элемент может быть выполнен на компараторе со стробированием. Сигнал, соответствующий дисперсии последних значений смещений, подается на вход сравнения блока 31 сравнения с минимальным значением дисперсии смещения. Минимальное значение дисперсии смещений, задаваемое блоком 33 установки
минимального значения, определяется погрешностью всего устройства, а также деформационными процессами, которые могут считаться незначительными и характеризовать устойчивое состояние горных пород. Это значение определяется на основе метрологических характеристик аппаратуры и из опыта, накопленного при контроле на аналогичных участках.
Если текущее значение дисперсии смещений не превышает установленной величины, заданной блоком 33 установки минимального значения, то на выходе блока 31 сравнения с минимальным значением будет сигнал О. На вход сигнализатора 44 устойчивого состояния будет подаваться 1.Сигнализаторы 35, 37, 43, 44 соответственно неустойчивого состояния, приближения неустойчивого состояния, критического состояния, устойчивого состояния при подаче на их входы и входы 47,48 управления логической единицы сигнализируют о соответствукицем состоянии горных пород путем зажига- ния лампочки или появления надписи на экране дисплея. Поэтому сигнализатором 44 устойчивого состояния в этом случае отмечено устойчивое состояние. На вход 46 управления блока 32 сравнения с максимальным значени- ем дисперсии смещений подан О,который поступает с выхода этого блока на вход сигнализатора 37 неустойчивого состояния, не вызывая индикацию этого состояния. Хотя на вход 47 управления сигнализатора 35 приближения неустойчивого состояния при этом подается 1,на его вход поступает О, так как на выходе элемента 39 совпадения также нуль, который поступает на вход 40 управления блока 36 сравнения с предыдущим значением дисперсии смещений. Сигнализации критического состояния и приближения неустойчивого состояния при этом не производится. При превышении дисперсией смещений максимального значения задаваемого блоком 34 установки максимального значения, с выхода блока 31 сравнения с минимальным значением дисперсии смещений поступает сигнал управления на вход 46 управления блока 32 сравнения с максимальным значением дисперсии смещеиий. На выходе этого блока появляется ), и через сигнализатор 37 неустойчивого состоя-
ния поступает информация о неустойчивом состоянии. Этим же сигналим через инверторы 41,42 запрещается сиг- нализа1Ц1я приближения неустойчивого состояния и критического состояния. Если же значение дисперсии находится в промежутке между минимальным и максимальным значениями, то на выходе блока 31 сравнения с минимальным значением образуется J, а на выходе блока 32 сравнения с максимальным значением - О. На вход элемента 39 совпадения поступают логические единицы, включающие сигнализатор 43 критического состояния. Эта же единица поступает на вход 40 упр авления блока 36 сравнения с предыдущим значением дисперсии смещений. Если сигнал с выхода бтока 16 определения текущего значения дисперсии смещений пре- выщает величину сигнала с блока 18 определения предыдущего значения дисперсии смещений на величину, задаваемую блоком 33 установки минимального значения (что достигается суммированием этих двух величин в сумматоре 38), то на выходе блока 36 сравнения с предыдущим зиачением образуется 1, включающая сигнализатор 35 приближения неустойчивого состояния, на вход 47 управления которого подается 1 с выхода иивертора 42.
Устройство может быть реализовано как аппаратным, так и программным путем.
Формула изобретения
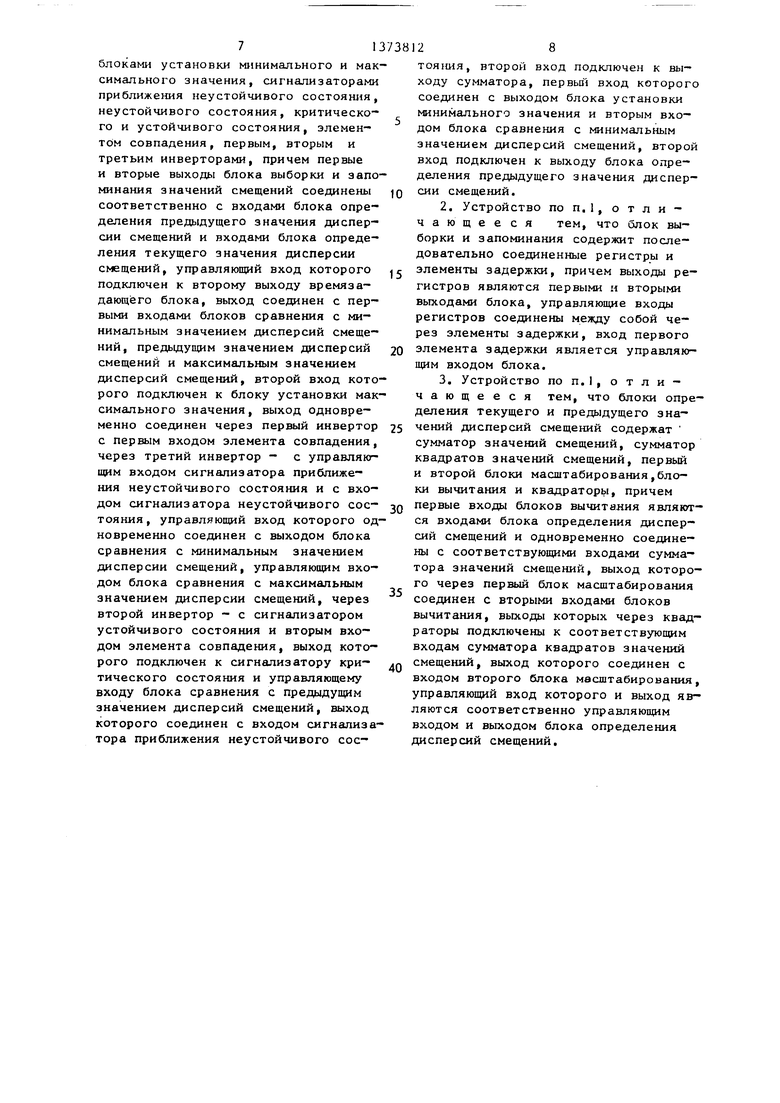
1. Устройство контроля состояния горных пород, включающее расположенные в шпуре реперы, соединенные между собой штангой, на которой укреп- лен измеритель смещений реперов,выход которого соединен с входом блока преобразования сигнала, времязадающий блок, первый выход которого подклю чен к управляющим входам блоков преобразования сигнала и блока выборки и запоминания значений смещений,вход которого соединен с выходом блока преобразования сигнала, сумматор, отличающе еся тем, что, с целью повыщения надежности контроля , оно снабжено блоками определения текущего и предыдущего значения дисперсии смещений, блоками сравнения с минимальным, максимальным и предыдущим значениями дисперсий смещений.
713
блоками установки минимального и максимального значения, сигнализаторами приближения неустойчивого состояния, неустойчивого состояния, критического и устойчивого состояния, элементом совпадения, первым, вторым и третьим инверторами, причем первые и вторые выходы блока выборки и запоминания значений смещений соединены соответственно с входами блока определения предыдущего значения дисперсии смещений и входами блока определения текущего значения дисперсии смещений, управляющий вход которого подключен к второму выходу времяза- дающего блока, выход соединен с первыми входами блоков сравнения с минимальным значением дисперсий смещений, предыдущим значением дисперсий смещений и максимальным значением дисперсий смещений, второй вход которого подключен к блоку установки максимального значения, выход одновременно соединен через первый инвертор с первым входом элемента совпадения, через третий инвертор - с управляющим входом сигнализатора приближения неустойчивого состояния и с входом сигнализатора неустойчивого сое- тояния, управляющий вход которого одновременно соединен с выходом блока сравнения с минимальным значением дисперсии смещений, управляющим входом блока сравнения с максимальным значением дисперсии смещений, через второй инвертор - с сигнализатором устойчивого состояния и вторым входом элемента совпадения, выход которого подключен к сигнализатору кри- тического состояния и управляющему входу блока сравнения с предыдущим значением дисперсий смещений, выход которого соединен с входом сигнализатора приближения неустойчивого сое-
0 5 0 Q
5
128
тояния, второй вход подключен к выходу сумматора, первьш вход которого соединен с выходом блока установки минимального значения и вторым входом блока сравнения с минимальным значением дисперсий смещений, второй вход подключен к выходу блока определения предыдущего значения дисперсии смещений.
2.Устройство по п.1, о т л и - чающееся тем, что блок выборки и запоминания содержит последовательно соединенные регистры и элементы задержки, причем выходы регистров являются первыми и вторыми выходами блока, управляющие входы регистров соединены между собой через элементы задержки, вход первого элемента задержки является управляющим входом блока.
3.Устройство по п.1, о т л и - чающееся тем, что блоки определения текущего и предыдущего значений дисперсий смещений содержат сумматор значений смещений, сумматор квадратов значений смещений, первый
и второй блоки масштабирования,блоки вычитания и квадраторы, причем первые входы блоков вычитания являются входами блока определения дисперсий смещений и одновременно соединены с соответствующими входами сумматора значений смещений, выход которого через первый блок масштабирования соединен с вторыми входами блоков вычитания, выходы которых через квадраторы подключены к соответствующим входам сумматора квадратов значений смещений, выход которого соединен с входом второго блока масштабирования, управляющий вход которого и выход являются соответственно управляющим входом и выходом блока определения дисперсий смещений.
Г
lUtl
7Л

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный статистический анализатор | 1987 |
|
SU1434453A1 |
| Устройство для решения задачи Лагранжа | 1990 |
|
SU1817090A1 |
| Адаптивный статистический анализатор | 1980 |
|
SU877564A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ПЕРИОДИЧЕСКОГО ЭЛЕКТРИЧЕСКОГО СИГНАЛА В КОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
SU1800927A1 |
| СПОСОБ СЖАТИЯ РЕЧЕВОГО СИГНАЛА ПУТЕМ КОДИРОВАНИЯ С ПЕРЕМЕННОЙ СКОРОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, КОДЕР И ДЕКОДЕР | 1993 |
|
RU2107951C1 |
| Вероятностный интегрирующий преобразователь аналог-код | 1987 |
|
SU1441476A1 |
| Устройство для определения момента изменения свойств случайных величин | 1979 |
|
SU881767A1 |
| ВОКОДЕРНАЯ ИНТЕГРАЛЬНАЯ СХЕМА ПРИКЛАДНОЙ ОРИЕНТАЦИИ | 1995 |
|
RU2183034C2 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| Устройство для определения стационарности случайного процесса | 1981 |
|
SU1109761A1 |
Изобретение относится к горной пром-ти. Цель изобретения - повышение надежности контроля. Устройство содержит расположенные в шпуре 1 реперы 3, соединенные между собой штангой 5, на которой укреплен измеритель 6 смещений репера 3, выход которого соединен с блоком 7 преобразования, времязадающий блок 9, блок 10 управления блоком 11 выборки и запоминания значений смещений, включающий регистры. Устройство содержит блоки 16 и 18 определения текущего и предыдущего значений дисперсий смещений, блоки 31 и 32, 36 сравнения с минимальным, максимальным и предыдущим значениями дисперсий смещений, блоки 33,34 установки максимального и минимального значений, сигнализаторы приближения неустойчивого состояния, критического и устойчивого состояний, элемент 39 совпадения, первый и второй инверторы 41,42.Блоки 16 и 18 содержат сумматор смещений. Показания, соответствующие значениям смещений в различные моменты времени, передвигаются последовательно на одну ячейку памяти, и в первый регистр заносится значение смещений. На блоки 31,32,36 подается сигнал с блока 16 о текущем значении дисперсии смещений. Через инверторы 41 и 42 запрещается сигнализация неустойчивого и критического состояний. 2 3 . п. 4г-лы, 3 ил. с (Л со ч
| Семевская Н.В | |||
| Определение скорости и ускорения смещения кровли горных выработок | |||
| - Изв | |||
| ВУЗов | |||
| Горный журнал, 1976, № 12, с.49-51. |
