00
4 1C
01
О)
Изобретение относится к аналоговой вычислительной технике и предназначено для использования при моделировании механических систем с парами трения, силы трения которых зависят в движении от направления и величины относительной скорости элементов пары, а в относительном покое - от
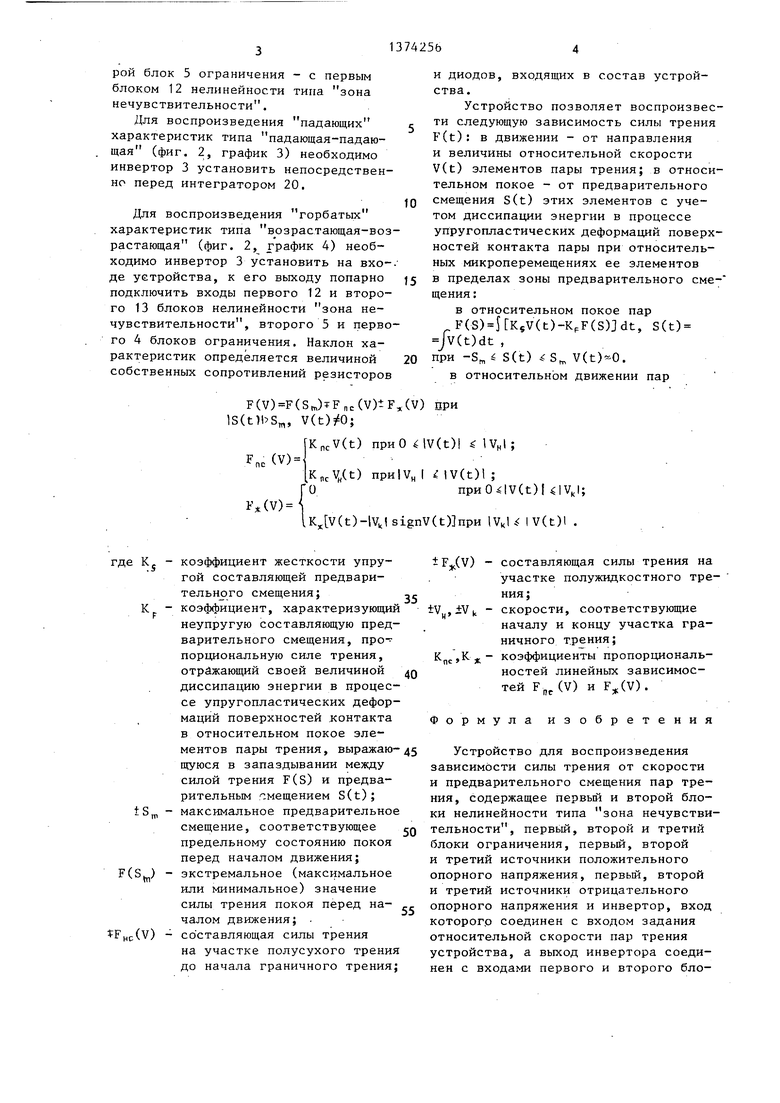
коя. Интегратор выполнен на операционном усилителе 36 и включает конденсатор 37 и резистор,38. Напряжение с входа устройства 1 поступает на вход инвертора 3 и одновременно на входы первого и второго блоков 4 и 5 ограничения, на опорные входы которых поступает постоянное опорное напредварительного смещения их с учетом Q пряжение от источников 30 и 33. С выхода инвертора 3 напряжение подается на первьй вход интегратора 20 и одновременно на входы первого и второго блоков 12 и 13, на опорные входы ко- 5 торых поступает постоянное опорное Напряжение от источников 34 и 31. С выхода интегратора 20 напряжение поступает на его второй вход непосредственно через резистор 27, повыдиссипации энергии в процессе упруго- пластических деформаций поверхностей контакта пары трения при относительных микроперемещениях ее элементов в пределах зоны предварительного смещения .
Цель изобретения.- повышение точности.
На фиг. 1 представлена схема усткоя. Интегратор выполнен на операционном усилителе 36 и включает конденсатор 37 и резистор,38. Напряжение с входа устройства 1 поступает на вход инвертора 3 и одновременно на входы первого и второго блоков 4 и 5 ограничения, на опорные входы которых поступает постоянное опорное напряжение от источников 30 и 33. С выхода инвертора 3 напряжение подается на первьй вход интегратора 20 и одновременно на входы первого и второго блоков 12 и 13, на опорные входы ко- торых поступает постоянное опорное Напряжение от источников 34 и 31. С выхода интегратора 20 напряжение поступает на его второй вход непосредственно через резистор 27, повы
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования механических систем с трением (его варианты) | 1981 |
|
SU1015400A1 |
| Устройство для моделирования силы трения | 1981 |
|
SU989564A1 |
| Устройство для моделирования коэффициента трения (его варианты) | 1981 |
|
SU1015399A1 |
| Устройство для моделирования силы трения | 1981 |
|
SU999071A1 |
| Устройство для моделирования силы трения | 1986 |
|
SU1399779A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU972530A2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2297048C1 |
| Устройство для моделирования силы трения | 1987 |
|
SU1543427A1 |
| Устройство для воспроизведения характеристик силы трения | 1983 |
|
SU1167628A1 |
| Устройство для моделирования упруговязкой фрикционной пары | 1990 |
|
SU1780091A1 |
Изобретение относится к области аналоговой вычислительной техники и предназначено для использования при моделировании механических систем с парами трения. Цель изобретения - повьшение точности. С этой целью в устройство введены интегратор и блок задания ограничения. Подавая на вход устройства сигнал, пропорциональный относительной скорости скольжения пар трения, создается возможность получить на выходе сигнал, пропорциональный силам трения, зависящим в движении от направления и величины относительной скорости элементов пары,, а в относительном покое - от предварительного их смещения. 3 ил. i (Л
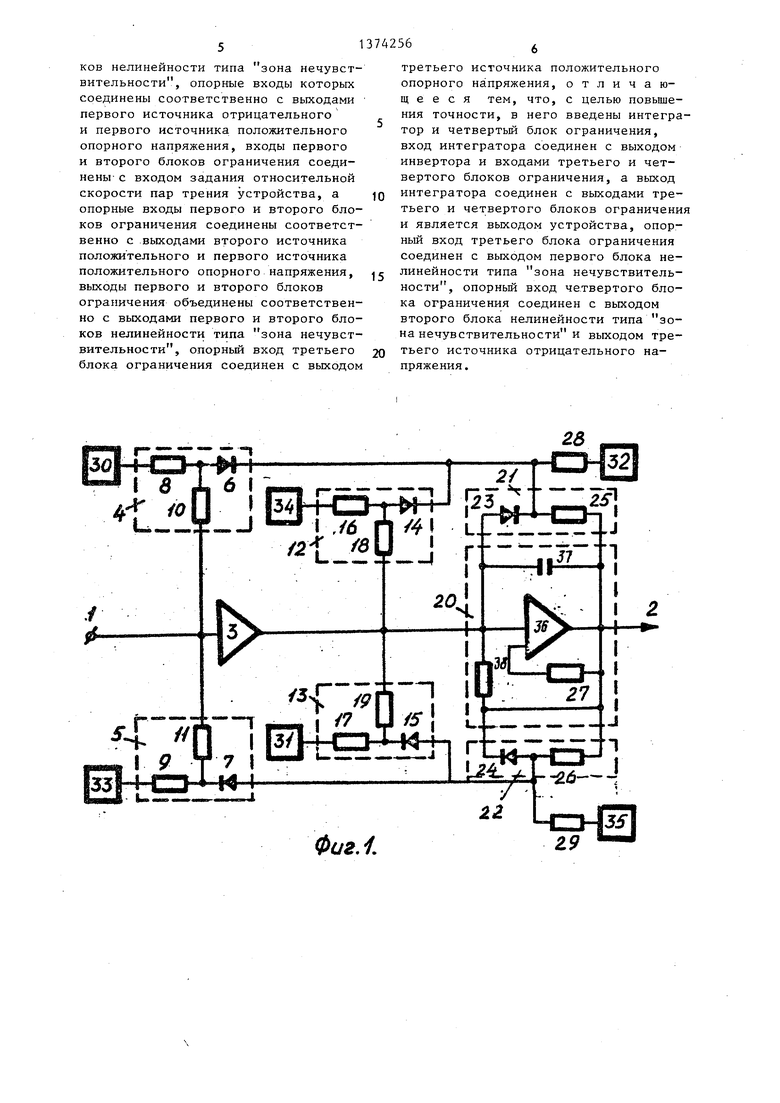
ройства; на фиг. 2 - зависимости силы20 устойчивость его работы в динами- трения движения F(V) от.скорости от- ческих режимах, и на первый вход по носительного скольжения пар трения, воспроизводимых устройством;на фиг.З- воспроизводимая устройством зависиобратным связям через третий и четвертый блоки 21 и 22 ограничения. На опорные точки третьего 21 и четвертомость между F(S) и S с учетом запаз- 25 го 22 блоков ограничения через первьй
30
35
40
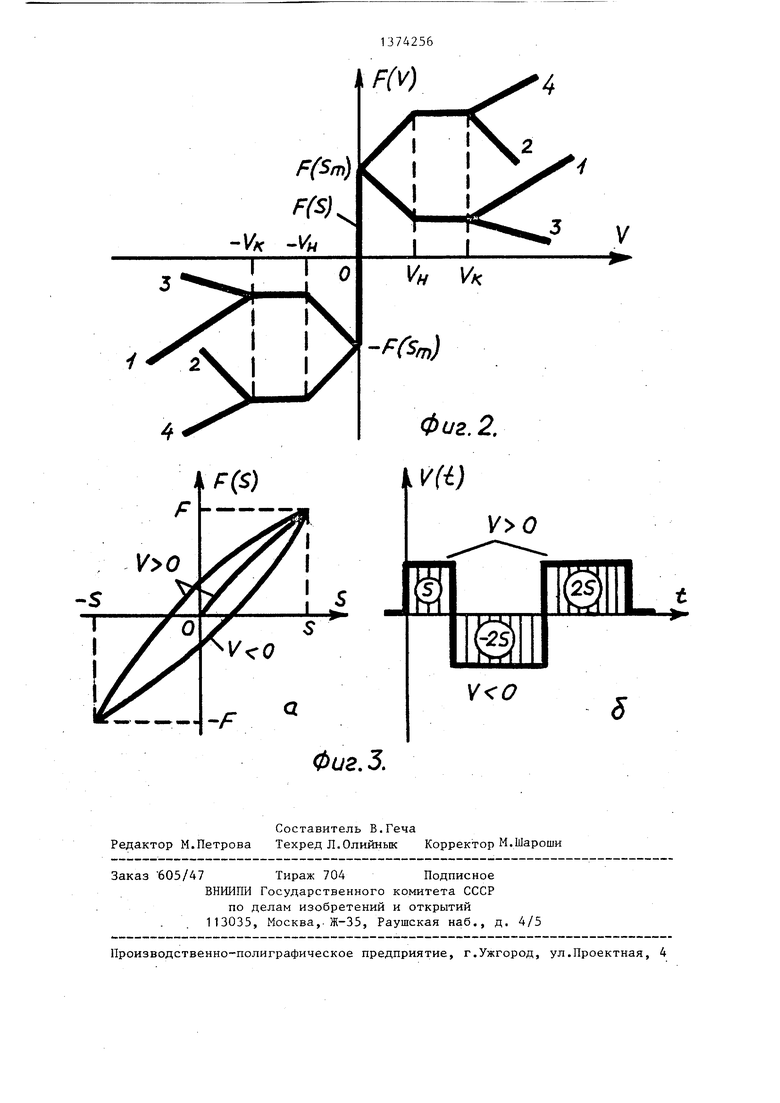
ывания между ними, построенная для случая малых изменений относительной корости V(t);0 элементов пары трения ри перемещениях их в пределах зоны редварительного смещения . Устройство содержит вход 1 задаия относительной скорости пар трения, выход 2 по силе трения, инвертор 3, первьй 4 и второй 5 блоки ограничения, моделирующие максимальную величину изменения силы трения на участке полусухого трения, выполненные на диодах 6 и 7 и резисторах 8, 9 и 10, 11, первый 12 и второй О блоки нелинейности типа зона нечувствительности, моделирующие изменение скорости конца y4acTjca граничного трения, выполненные на диодах 14, 15 и резисторах 16, 17 и 18, 19, интегратор 20, третий 21 и четвертьй 22д блоки ограничения, моделирующие изменение величины силы трения покоя, выполненные на диодах 23 и 24 и резисторах 25 и 26, резистор 27 обратной связи интегратора, согласующие резис-„. торы 28 и 29, второй, первьй и третий источники 30, 31 и 32 положительного опорного напряжения, второй, первьй и третий источники 33, 34 и 35 отрицательного опорного напряжения, пропорциональные соответственно максимальной величине изменения силы трения на участке полусухого трения и максимальной величине силы трения по55
устойчивость его работы в динами- ческих режимах, и на первый вход по
обратным связям через третий и четвертый блоки 21 и 22 ограничения. На опорные точки третьего 21 и четверто0
5
0
.
5
и второй согласующие резисторы 28 и 29 поступает постоянное опорное напряжение от источников 32 и 35, одновременно напряжение на эти точки подается соответственно с выходов первого блока 4 ограничения и первого блока 12 нелинейности типа зоны нечувствительности и с выходов второго блока 5 ограничения и второго блока 13 нелинейности типа, зоны нечувствительности.
В результате на выходе интегратора 20, т.е. на выходе устройства, формируется напряжение, соответствующее семейству падающих характеристик типа падающая-возрастающая зависимости силы трения в движении от направления и величины скорости скольжения элементов пары (фиг.2, график 1), а в относительном покое - от предварительного смещения их с учетом диссипации энергии в процессе упругопластических деформаций поверх-- ностей контакта пары трения при -относительных микроперемещениях ее элементов в пределах зоны предварительного смещения (фиг. За).
Для воспроизведения горбатых характеристик типа возрастающая- падающая (фиг. 2, график 2) необходимо в исходной схеме (фиг. 1) поменять местами первый блок 4 ограничения с вторым блоком 13 нелинейности типа зона нечувствительности, второй блок 5 ограничения - с первым блоком 12 нелинейности типа зона нечувствительности.
Для воспроизведения падающих характеристик типа падающая-падающая (фиг, 2, график 3) необходимо инвертор 3 установить непосредственно перед интегратором 20.
Для воспроизведения горбатых
характеристик типа возрастающая-возрастающая (фиг. 2, график 4) необходимо инвертор 3 установить на входе устройства, к его выходу попарно подключить входы первого 12 и второго 13 блоков нелинейности зона нечувствительности, второго 5 и первого 4 блоков ограничения. Наклон характеристик определяется величиной собственных сопротивлений резисторов
F(V)F(SjTFnc(V)±F,(V) при lS(t)bS, V(t)fO;
fKncV(t) приО IV(t)|
Fnc(V)
JK.) ПРИ|УН I IV(t)l ;
ГОприО |У(1)и|У,1;
(t)-|VJsignV(t)npH IVH IV(t)l .
де К, - коэффициент жесткости упругой составляющей предварительного смещения; ,- К - коэффициент, характеризующий неупругую составляющую предварительного смещения, пропорциональную силе трения, отражающий своей величиной 0 диссипацию энергии в процессе упругопластических деформаций поверхностей контакта в относительном покое элементов пары трения, выражаю-45 щуюся в запаздывании между силой трения F(S) и предва.- рительным смещением S(t); tS - максимальное предварительное
смещение, соответствующее eg предельному состоянию покоя перед началом движения; F(S. ) - экстремальное (максимальное или минимальное) значение силы трения покоя перед началом движения; .
FHC(V) - со ставляющая силы трения
на участке полусухого трения до начала граничного трения;
55
и диодов, входящих в состав устройства.
Устройство позволяет воспроизвести следующую зависимость силы трения F(t): в движении - от направления и величины относительной скорости V(t) элементов пары трения; в относительном покое - от предварительного смещения S(t) этих элементов с учетом диссипации энергии в процессе упругопластических деформаций поверхностей контакта пары при относительных микроперемещениях ее элементов в пределах зоны предварительного смещения :
в относительном покое пар F(S) (t)-KpF(S)dt, S(t) JV(t)dt , при -8„ S(t) .S V(t)«0.
в относительном движении пар
- 0 5
g
5
t F,(V) - составляющая силы трения на участке полужидкостного трения ; tV ,iVk скорости, соответствующие
началу и концу участка граничного трения;
К, коэффициенты пропорциональ- ностей линейных зависимостей (V) и F.(V).
Формула изобретения
Устройство для воспроизведения зависимости силы трения от скорости и предварительного смещения пар трения, содержащее первый и второй блоки нелинейности типа зона нечувствительности, первьш, второй и третий блоки ограничения, первьй, второй и третий источники положительного опорного напряжения, первый, второй и третий источники отрицательного опорного напряжения и инвертор, вход которого соединен с входом задания относительной скорости пар трения устройства, а выход инвертора соединен с входами первого и второго бло5
ков нелинейности типа зона нечувствительности, опорные входы которых соединены соответственно с выходами первого источника отрицательного и первого источника, положительного опорного напряжения, входы первого и второго блоков ограничения соединены- с входом задания относительной скорости пар трения устройства, а опорные входы первого и второго блоков ограничения соединены соответственно с выходами второго источника положительного и первого источника положительного опорного напряжения, выходы первого и второго блоков ограничения объединены соответственно с выходами первого и второго блоков нелинейности типа зона нечувствительности, опорный вход третьего блока ограничения соединен с выходо
Фиг. /.
третьего источника положительного опорного напряжения, отличающееся тем, что, с целью повышения точности, в него введены интегратор и четвертьй блок ограничения, вход интегратора соединен с выходом инвертора и входами третьего и четвертого блоков ограничения, а выход интегратора соединен с выходами третьего и четвертого блоков ограничени и является выходом устройства, опорный вход третьего блока ограничения соединен с выходом первого блока нелинейности типа зона нечувствительности, опорный вход четвертого блока ограничения соединен с выходом второго блока нелинейности типа зона нечувствительности и выходом третьего источника отрицательного напряжения .
Фиг. 5.
Фиг. 2.
V(i)
| Устройство для моделирования силового канала механической передачи | 1981 |
|
SU968830A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для моделирования силы трения | 1981 |
|
SU989564A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
