Изобретение относится к аналоговой вычислительной технике и предназначено для использования при моделировании систем с парами трения, силы сопротивления которых зависят от предварительного смещения элементов пары и его предыстории, нормального усилия в контакте пары и направления относительного скольжения элементов пары после их выхода из зоны предварительного смещения особенно механических систем с релаксационными колебаниями.
Цель изобретения - повышение точности моделирования и расширение области применения устройства за счет учета зависимости силы сопротивления в паре трения от нормального усилия в контакте, скачкообразного изменения силы трения при выходе из зоны предварительного смещения и от тангенциальной вибрации.
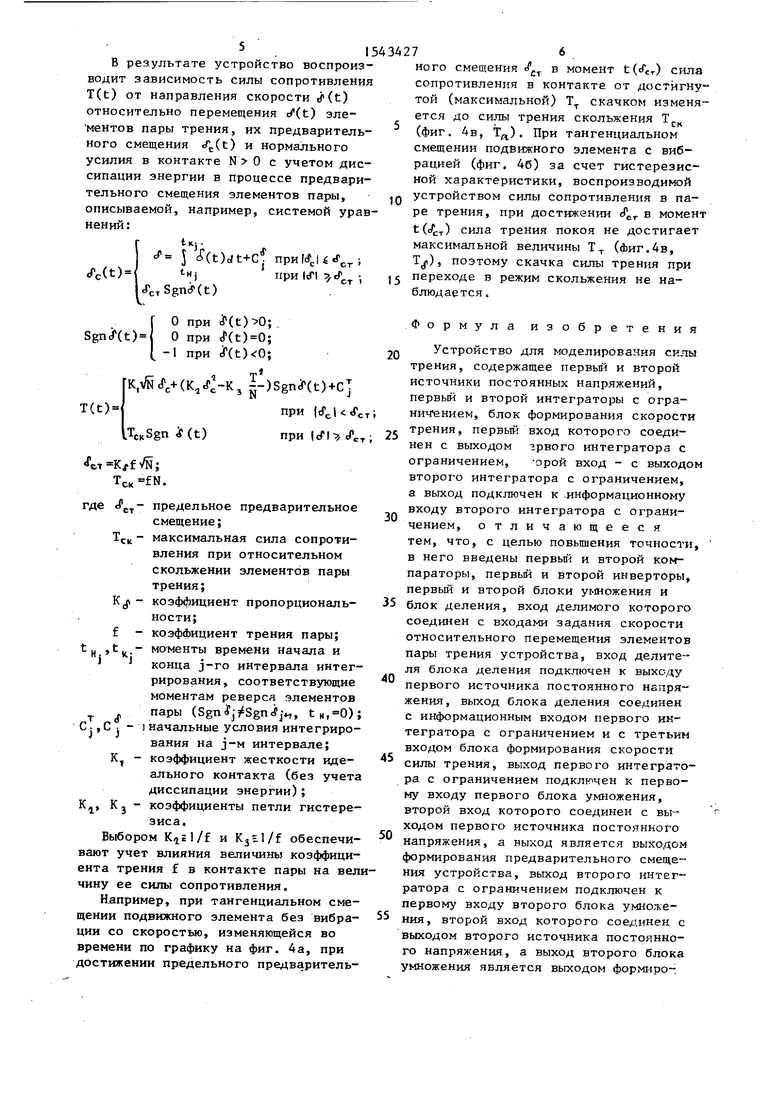
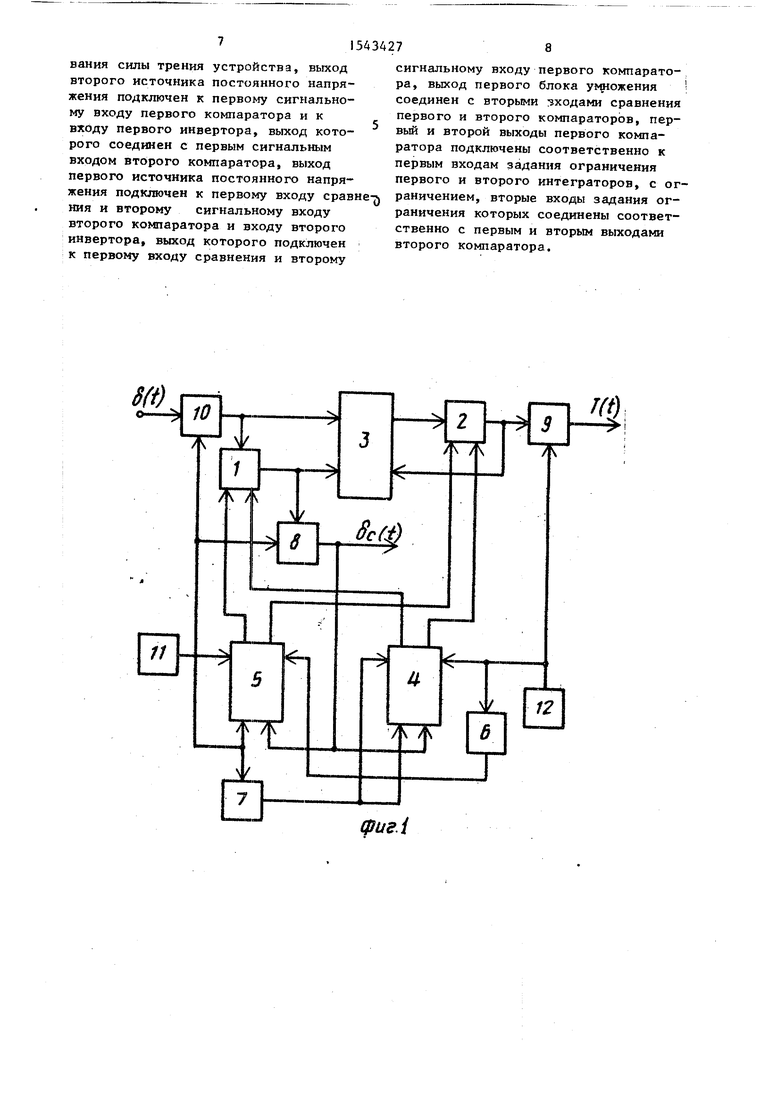
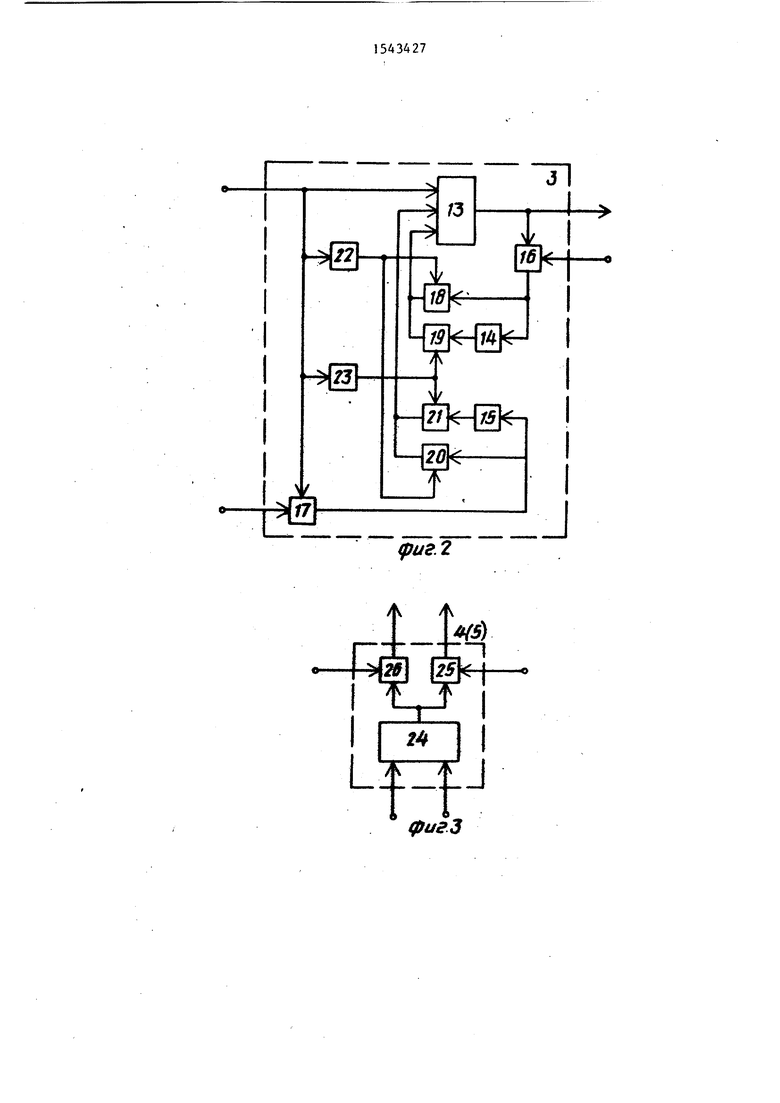
На фиг. I представлена блок-схема устройства; на фиг. 2 и 3 - блок-схемы блока формирования скорости силы трения и компараторов; на фиг. 4 ю
ч
31
зависимости силы трения от смещения и скорости смещения от времени.
Устройство для моделирования силы трения содержит вход по сигналу, соответствующему скорости относительного перемещения tf(t) элементов пары трения, первый выход по сигналу, соответствующему силе трения T(t), второй выход по сигналу,, соответст- вующему предварительному смещению (t), первый 1 и второй 2 интеграторы с ограничением, блок З ормирб- вания скорости силы трения T(t), аервый 4 и второй 5 компараторы, первый 6 и второй 7 инверторы, первы 8 и второй 9 блоки умножения, блок I0 деления, рервый 11 и второй 12 источники постоянных напряжений, пропорциональных соответственно корню квадратному нормальной силы в контакте пары и самой этой силе.
Интеграторы 1 и 2 имеют входы задания ограничения нижнего и- верхнего уровня выходного напряжения.
Блок 3 формирования скорости силы трения f(t) может быть выполнен на сумматоре 13, двух инверторах 14 и 1 двух блоках 16 и 17 умножения, четырех ключах 18 и 19, 20 и 21, выпол- ненных, например, на реле с замыкающими контактами, и двух нуль-органах 22 и 23.
Компараторы 4 и 5 выполнены на одном нуль-органе 24 и двух ключах 25 и 26.
Устройство работает следующим образом.
В процессе моделирования сигнал скорости f(t) с входа устройства поступает на вход делимого блока 10 деления, на вход делителя которого поступает сигнал от первого источника 11 постоянного напряжения, соответствующий vN нормальной силы N в контакте пары трения. Сигнал с выхода блока 10 деления, соответствующий частному , подают на вход первого интегратора 1 и на первый вход блока 3, сигнал с выхода первого интегратора 1, соответствующий cfc(t)/, //N, поступает на второй вход блока 3 и на один из входов второго блока 9 умножения, на другой вход которого поступает напряжение от источника 11 в результате на выходе блока 9 умножения и, следовательно, на втором выходе устройства получают сигнал, соo
5
0
ответствующий предварительному смещению ГС(С).
С выхода блока 3 сигнал, соответствующий частному T(t)/N, поступает на вход второго интегратора 2, с выхода которого сигнал, соответствующий T(t)/N, подают на третий вход блока 3 и на один из входов первого блока 8 умножения, на другой вход которого поступает сигнал от второго источника 12 постоянного напряжения, s результате на выходе первого блока 8 умножения и, следовательно, на первом выходе устройства получают сигнал, соответствующий силе сопротивления T(t) в паре трения. Одновременно с выхода второго блока 9 умножения сигнал P(t) поступает на вторые входы сравнения первого 4 и второго 5 компараторов для сравнения с разнополярными сигналами, соответствующими т/N, поступающими на первые входы сравнения компараторов 4 и 5, на первые и вторые сигнальные входы которых подают разнополярные напряжения, соответствующие -JS и N от источников 11 и 12 непосредственно и через инверторы 6 и 7.
При достижении сигналом fc(t) величины предельного значения предварительного смещения в зависимости от его полярности с соответствующих выходов компараторов 4 и 5 сигналы ограничения, пропорциональные li и VN, поступают на соответствующие разнополярные ограничительные входы интеграторов 1 и 2, что печивает ограничение выходных напряжений этих интеграторов величинами
5
0
40
и TCkHN.
5
0
5
В случае, если к моменту достижения величиной cfc(t) значения ГСГ сила сопротивления T(t) превысит макси- майьное значение ТСн, т.е. при T(t) Тск, то устройством воспроизводится скачок силы сопротивления при выходе пары из зоны предварительного смещения, т.е. при переходе из режима относительного покоя в режим относительного скольжения. При наличии тангенциальной вибрации к моменту достижения величиной cfc(t) значения Г„
„ст, когда |T(t)TfcH, указанный скачок силы сопротивления в паре трения уже не воспроизводится и сила сопротивления постепенно достигает величины Т„„.
В результате устройство воспроизводит зависимость силы сопротивления T(t) от направления скорости rf(t) относительно перемещения e/(t) эле- ментов пары трения, их предварительного смещения c(t) и нормального усилия в контакте N 0 с учетом диссипации энергии в процессе предварительного смещения элементов пары, описываемой, например, системой уравнений:
tKj« - (t)dt+C при с си«Гст) Sc(t) {t-Hjпри UN yJcr -,
cTCTSgnc(t)
SgnJ4t)
О при Ј( О при T(t)0; -1 при Ј(
K,( |-)Sgn(t)+cT
TCKSgn (t)
при
при IcfU ст; 25
fct
K/f/N;
LCK
fN.
где «fCT- предельное предварительное смещение;
Tcit - максимальная сила сопротивления при относительном скольжении элементов пары трения;
К - коэффициент пропорциональности;
коэффициент трения пары; моменты времени начала и конца j-ro интервала интегрирования, соответствующие моментам реверса элементов т f пары (Sgn Sgnrf, tH,0); С -, С - 1 начальные условия интегрирования на j-м интервале;
К. f - V4f
коэффициент жесткости идеального контакта (без учета диссипации энергии); Кг, К3 - коэффициенты петли гистерезиса.
Выбором Ktil/f и K3tl/f обеспечивают учет влияния величины коэффициента трения f в контакте пары на велчину ее силы сопротивления.
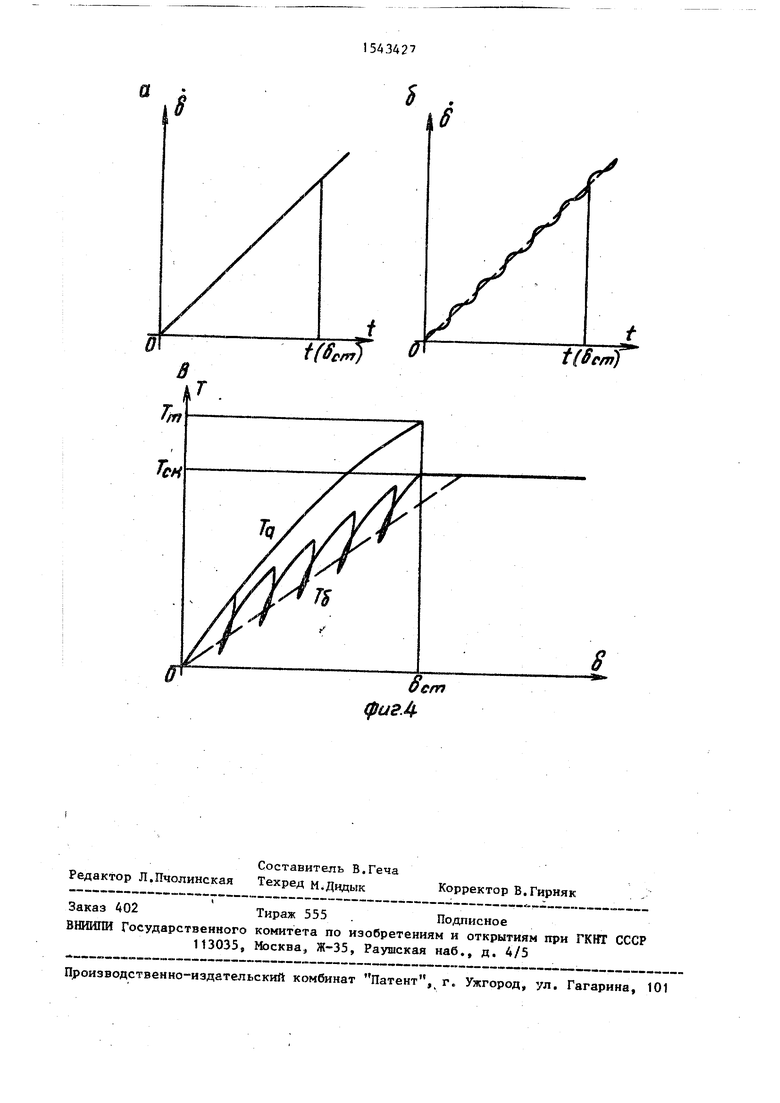
Например, при тангенциальном смещении подвижного элемента без вибра- ции со скоростью, изменяющейся во времени по графику на фиг. Да, при достижении предельного предваритель10
5
0
5
0
5
0
5
0
5
ного смещения /Ст в момент t() сила сопротивления в контакте от достигнутой (максимальной) Тт скачком изменяется до силы трения скольжения ТСг (фиг. 4в, Тл). При тангенциальном смещении подвижного элемента с вибрацией (фиг. 46) за счет гистереэис- ной характеристики, воспроизводимой устройством силы сопротивления в паре трения, при достижении РСГ в момент t(cfCT) сила трения покоя не достигает максимальной величины Тт (Фиг.4в, Tj,), поэтому скачка силы трения при переходе в режим скольжения не наблюдается.
Формула изобретения
Устройство для моделирования силы трения, содержащее первый и второй источники постоянных напряжений, первый и второй интеграторы с ограничением, блок формирования скорости трения, первый вход которого соединен с выходом эрвого интегратора с ограничением, орой вход - с выходом второго интегратора с ограничением, а выход подключен к информационному входу второго интегратора с ограничением, отличающееся тем, что, с целью повышения точности, в него введены первый и второй компараторы, первый и второй инверторы, первый и второй блоки умножения и блок деления, вход делимого которого соединен с входами задания скорости относительного перемещения элементов пары трения устройства, вход делителя блока деления подключен к выходу первого источника постоянного напряжения, выход блока деления соединен с информационным входом первого интегратора с ограничением и с третьим входом блока формирования скорости силы трения, выход первого интеграто ра с ограничением подключен к первому входу первого блока умножения, второй вход которого соединен с выходом первого источника постоянного напряжения, а выход является выходом формирования предварительного смещения устройства, выход второго интегратора с ограничением подключен к первому входу второго блока умножения, второй вход которого соединен с выходом второго источника постоянного напряжения, а выход второго блока умножения является выходом формирования силы трения устройства, выход второго источника постоянного напряжения подключен к первому сигнальному входу первого компаратора и к входу первого инвертора, выход которого соединен с первым сигнальным входом второго компаратора, выход первого источника постоянного напряжения подключен к первому входу срав ния и второму сигнальному входу второго компаратора и входу второго инвертора, выход которого подключен к первому входу сравнения и второму
сигнальному входу первого компаратора, выход первого блока умножения соединен с вторыми входами сравнения первого и второго компараторов, первый и второй выходы первого компаратора подключены соответственно к первым входам задания ограничения первого и второго интеграторов, с ограничением, вторые входы задания ограничения которых соединены соответственно с первым и вторым выходами второго компаратора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования пары трения | 1988 |
|
SU1817110A1 |
| Устройство для моделирования пары трения | 1988 |
|
SU1628062A1 |
| Устройство для моделирования силы трения | 1986 |
|
SU1399779A1 |
| Устройство для моделирования упруговязкой фрикционной пары | 1990 |
|
SU1780091A1 |
| Устройство для воспроизведения зависимости силы трения от скорости и предварительного смещения пар трения | 1986 |
|
SU1374256A1 |
| Устройство для воспроизведения зависимости силы трения от нормальной силы,скорости,времени и предварительного смещения | 1985 |
|
SU1312619A1 |
| Устройство для моделирования привода конвейера | 1990 |
|
SU1762314A1 |
| Устройство для моделирования механической передачи | 1984 |
|
SU1238115A1 |
| Устройство для моделирования бесконтактного двигателя постоянного тока | 1985 |
|
SU1307468A1 |
| Устройство для моделирования двухстороннего ограничителя механических перемещений исполнительных механизмов | 1990 |
|
SU1742837A1 |
Изобретение относится к аналоговой вычислительной технике, предназначено для использования при моделировании систем с парами трения и позволяет воспроизводить зависимость силы сопротивления в паре от предварительного смещения элементов пары и его предыстории, нормального усилия в контакте пары и направления относительного скольжения элементов пары после их выхода из зоны предварительного смещения с учетом диссипации энергии в этой зоне, скачков силы трения при выходе из нее и возможности исключения указанных скачков при действии тангенциальной вибрации. Цель изобретения - повышение точности. Устройство содержит два интегратора, блок формирования сигнала, соответствующего скорости изменения силы трения, два компаратора, два инвертора, два блока умножения, блок деления и два источника постоянных напряжений, пропорциональных соответственно нормальному усилию в контакте пары и корню квадратному из этого усилия. Устройство по сигналу, соответствующему скорости относительного перемещения элементов пары трения, вырабатывает на своих выходах сигналы, соответствующие предварительному смещению элементов пары и силе трения в контакте пары. 4 ил.
Јглф
rizii
WSl
г
S
/
О
в
Лг
жт
Ген
ъ
О
/
,Х
о
/
X
S
Ост
(ригЛ
| Устройство для моделирования сухого трения | 1983 |
|
SU1103251A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для моделирования силы трения | 1986 |
|
SU1399779A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
