Изобретение относится к машиностроению, в частности к оборудованию для сборки резьбовых соединений, и может быть использовано в гайковер- тах, преимущественно стационарных с активным контролем крутящего момента затяжки резьбовых соединений.
Целью изобретения является уменьшение габаритов и упрощение коцструк ции за счет компактности привода.
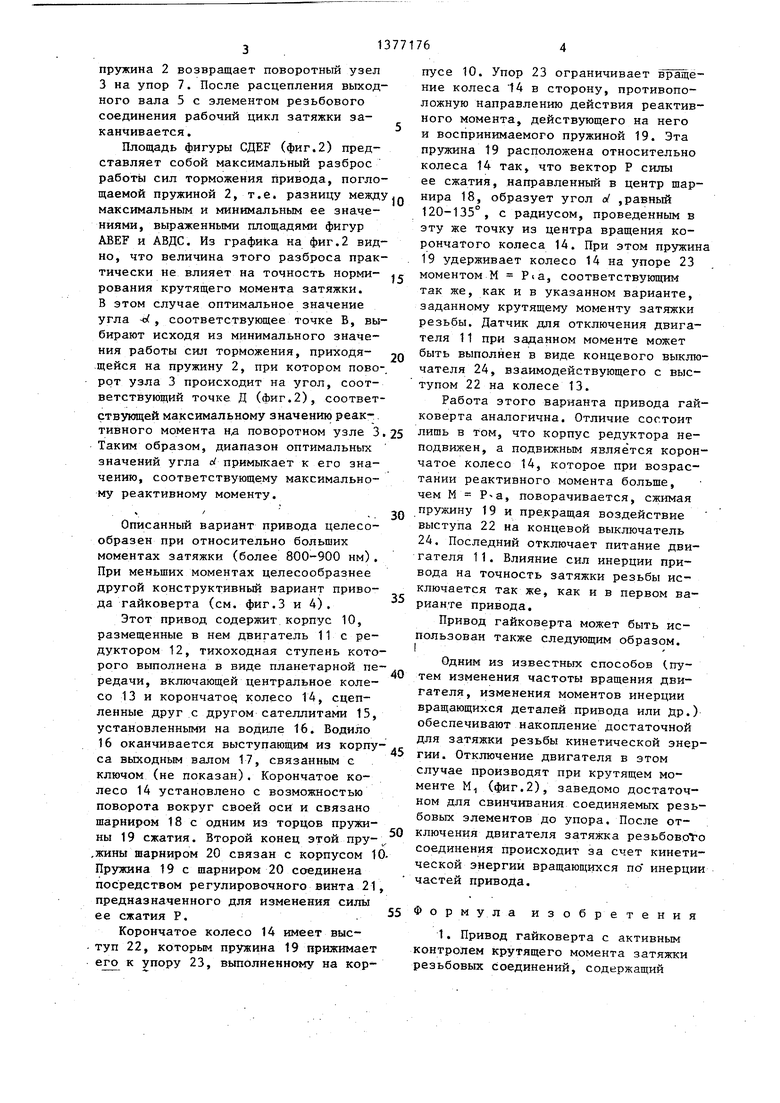
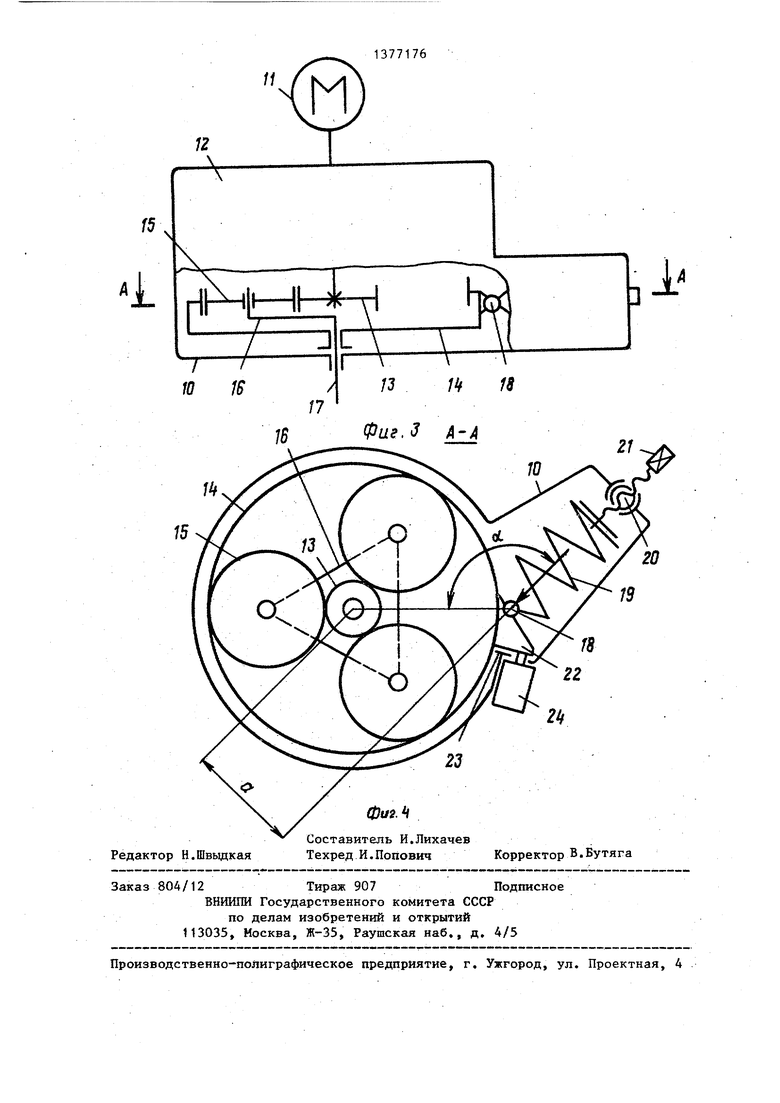
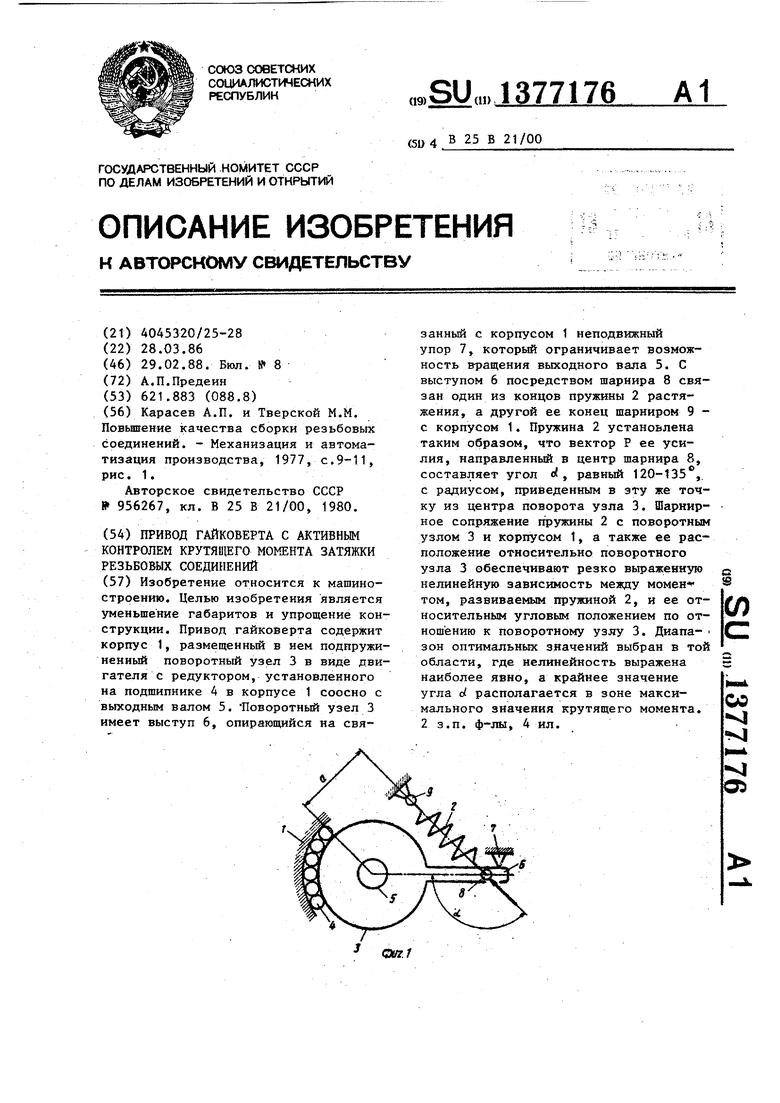
На фиг.1 изображена кинематическая схема привода гайковерта; на фиг.2 - график зависимости реактивного момента на поворотном узле от угла воздействия на него силы деформации пружины; на фиг.З -.кинематическая схема варианта исполнения привода гайковерта; на фиг,4 - сечение А-А на фиг,3. ,
Привод гайковерта с активным контролем крутящего момента затяжки резьбовых соединений содержит жестко установленный корпус 1, размещенные в нем поджатый относительно последне- го с помощью пружины 2 растяжения поворотный узел 3, установленный на подшипнике 4 в корпусе 1 соосно вы- Зсодному валу 5. Поворотный узел 3 имеет выступ 6, опирающийся на свя- занный с корпусом 1 неподвижный упор 7, который ограничивает возможность вращения поворотного узла 3 в сторону вращения выходного вала 5, С выступом 6 посредством шарнира 8 связан один из концов пружины 2 растяжения, а другой ее конец шарниром 9 - с корпусом 1. Пружина 2 установлена таким образом, что вектор Т ее усилия, направленный в центр шарнира 8, составляет угол с , равный 120-135, с радиусом, проведенным в эту же точку из центра поворота узла 3, Усилие Р растяжения пружины 2 выбрано т-аким образом, что она прижимает выступ 6 к неподвижному упору 7 с моментом
М Р-а, где
плечо силы Р относительно центра вращения поворотного узла 3. Шарнирное сопряжение пружины 2 с поворотным узлом 3 и кор- пусом 1, а также ее расположение относительно поворотного узла 3 обеспечивают резко выраженную нелинейную зависимость между моментом, развиваемым пружиной 2, и ее относительным угловым положением (угол о( ) по отношению к поворотному узлу 3, Диапазон оптимальных значений с выбран в той области, где нелинейность вьфажена наиболее явно, а крайнее значение угла 0 располагается в зоне максимального значения упомянутого момента (М„„кс ) Привод гайковерта снабжен также датчиком для его отключения при достижении определенного момента (не показан)„
Привод гайковерта работает следующим образом.
После того, как с помощью гайковерта (не показан) выходной вал 5 соединили с элементом резьбового соединения, включают привод. В процессе свинчивания резьбового соединения, когда крутящий момент сопротивления вращению выходного вала 5 привода гайковерта невелик, поворотный узел 3 неподвижен, так как пружина 2 прижимает его выступом 6 к неподвижному упору 7 на корпусе 1. После окончания свинчивания, когда торец гайки или винта (не показаны) упирается в торцовую поверхность стягиваемой детали (не показана), начинается затяжка резьбового соединения, при которой момент сопротивления вращению выходного вала 5 резко возрастает. При ег увеличении до величины, превышающей крутящий момент затяжки М Р-а, близкой к требуемому моменту затяжки резьбового соединения, датчик крутящего момента отключает двигатель. Силы инерции вращающихся частей привода несмотря на выключенньм привод стремятся и дальше поворачивать выходной вал 5, Однако при указанном моменте на выходном валу 5. поворотный узел 3 под действием реактивного момента отрывается до упора 7, преодолевая силу растяжения пружины 2 (фиг,2, точка В), Дальнейший поворот узла 3 несмотря на увеличение силы растяжения пружины 2 практически не приводит к росту реактивного момента на поворотном узле 3 и, следовательно, крутящего момента затяжки резьбового соединения, так как рост усилия растяжения пружины 2 компенсируется резко нарастающим уменьшением плеча а этой силы, В результате этого момент, создаваемый пружиной 2 на поворотном узле 3, не может превысить максимального значения , , величина которого определяется силой предварительного растяжения этой пружины После полного поглощения кинематической энергии вращающихся по инерции частей привода (фиг.2, точка Д или Е)
пружина 2 возвращает поворотный узел 3 на упор 7. После расцепления выходного вала 5 с элементом резьбового соединения рабочий цикл затяжки заканчивается.
Площадь фигуры СДЕР (фиг.2) представляет собой максимальный разброс работь сил торможения привода, поглощаемой пружиной 2, т.е. разницу между максимальным и минимальным ее значениями, выраженными площадями фигур ABEF и АВДС. Из графика на фиг.2 видно, что величина этого разброса прак
тически не влияет на точность нормирования крутящего момента затяжки. В этом случае оптимальное значение угла -о( , соответствующее точке В, вы- брфают исходя из минимального значения работы сил торможения, приходя- .щейся на пружину 2, при котором поворот узла 3 происходит на угол, соответствующий точке Д (фиг.2), соответствующей максимальному значению реактивного момента нд поворотном узле 3 Таким образом, диапазон оптимальных значений угла о1 примыкает к его значению, соответствующему максимальному реактивному моменту.
Описанный вариант привода целесообразен при относительно больших моментах затяжки (более 800-900 нм). При меньших моментах целесообразнее другой конструктивный вариант привода гайковерта (см. фиг.З и 4).
Этот привод содержит корпус 10, размещенные в нем двигатель 11с редуктором 12, тихоходная ступень которого выполнена в виде планетарной пе40
редачи, включающей центральное колесо 13 и корончатое колесо 14, сцепленные друг с другом сателлитами 15, установленными на водиле 16. Водило 16 оканчивается выступающим из корпу- . са выходным валом 17, связанным с ключом (не показан). Корончатое колесо 14 установлено с возможностью поворота вокруг своей оси и связано шарниром 18 с одним из торцов пружины 19 сжатия. Второй конец этой пружины шарниром 20 связан с корпусом 10 Пружина 19с шарниром 20 соединена посредством регулировочного винта 21, предназначенного для изменения силы ее сжатия Р.
Корончатое колесо 14 имеет вые-
туп 22, которым пружина 19 прижимает его к упору 23, выполненному на кор50
55
5
п
5
0
5
0
.
0
пусе 10. Упор 23 ограничивает вращение колеса 14 в сторону, противоположную направлению действия реактивного момента, действующего на него и воспринимаемого пружиной 19. Эта пружина 19 расположена относительно колеса 14 так, что вектор Р силы ее сжатия, направленный в центр шарнира 18, образует угол о/ ,равный 120-135°, с радиусом, проведенным в эту же точку из центра вращения корончатого колеса 14. При этом пружина 19 удерживает колесо 14 на упоре 23 моментом М Pia, соответствующим так же, как и в указанном варианте, заданному крутящему моменту затяжки резьбы. Датчик для отключения двигателя 11 при заданном моменте может быть выполнен в виде концевого выключателя 24, взаимодействующего с выступом 22 на колесе 13.
Работа этого варианта привода гайковерта аналогична. Отличие состоит лишь в том, что корпус редуктора неподвижен, а подвижным является корончатое колесо 14, которое при возрастании реактивного момента больше, чем М , поворачивается, сжимая пружину 19 и прекращая воздействие выступа 22 на концевой выключатель 24. Последний отключает питание двигателя 11. Влияние сил инерции привода на точность затяжки резьбы исключается так же, как и в первом варианте привода.
Привод гайковерта может быть использован также следующим образом.
Одним из известных способов (.путем изменения частоты вращения двигателя , изменения моментов инерции вращающихся деталей привода или Др.) обеспечивают накопление достаточной для затяжки резьбы кинетической энергии. Отключение двигателя в этом случае производят при крутящем моменте М, (фиг.2), заведомо достаточном для свинчивания соединяемых резьбовых элементов до упора. После отключения двигателя затяжка резьбовоТо соединения происходит за счет кинетической энергии вращающихся по инерции частей привода.
55 Формула изобретения
1. Привод гайковерта с активным контролем крутящего момента затяжки резьбовых соединений, содержащий
жестко установленный корпус, раэме- , щенные в нем подпружиненный относительно последнего поворотный узел и датчик для отключения привода при заданном крутящем моменте, о т л и- ч а ю щ и и с я тем, что, с целью уменьшения габаритов и упрощения конструкции, концы пружины с поворотным узлом и корпусом соединены с помощью
шарниров так, что вектор воздействия пружины на поворотный узел направлен в центр связывающего их шарнира под тупым углом к радиусу, приведенному из центра вращения поворотного узла в центр шарнира.
2. Привод по п.1, отличаю- щ и и с я тем, что величина тупого угла выбрана в пределах 120-135°.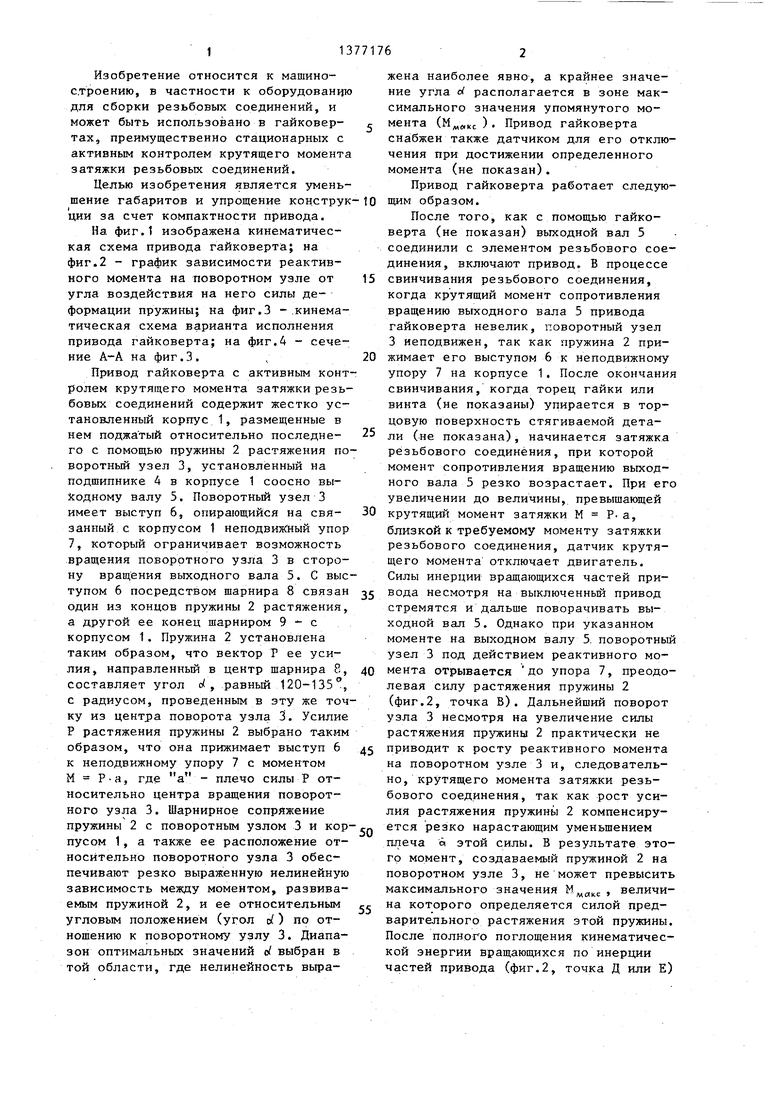
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ КОНТРОЛЬНО-ДИАГНОСТИЧЕСКИЙ СТЕНД | 2014 |
|
RU2597630C2 |
| Электромеханический гайковерт | 1978 |
|
SU956267A1 |
| КОНТРОЛЬНО-ДИАГНОСТИЧЕСКИЙ СТЕНД | 2006 |
|
RU2337336C2 |
| Электромеханический гайковерт | 1988 |
|
SU1565669A2 |
| Гайковерт | 1981 |
|
SU977144A1 |
| Гайковерт | 1981 |
|
SU977145A1 |
| ВИБРАЦИОННЫЙ ГАЙКОВЕРТ | 1994 |
|
RU2081741C1 |
| Устройство для сборки резьбовых соединений | 1989 |
|
SU1669703A1 |
| ГАЙКОВЕРТ | 2011 |
|
RU2473417C1 |
| ИНЕРЦИОННЫЙ ГАЙКОВЕРТ | 2013 |
|
RU2535835C2 |
90
f
Редактор Н.Швьщкая
фе/г.
Составитель И.Лихачев Техред И.Попович
Фаг.З к-А
20
19
Г8
22
2lt
23
Корректор В.Бутяга
| Карасев А.П | |||
| и Тверской М.М | |||
| Повьшгение качества сборки резьбовых соединений | |||
| - Механизация и автоматизация производства, 1977, с.9-11, рис | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электромеханический гайковерт | 1978 |
|
SU956267A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
