Изобретение относится к автоматизации управления работы землеройно- транспортной машины, а именно к устройству для управления рабочим органом землеройно-транспортной машины с гидромеханической трансмиссией.
Цель изобретения - повышение точности регулирования за счет повьше- ния точности замера тяговой мощности.
На чертеже представлена блок-схема устройства для регулирования рабочего режима замлеройно-транспорт- ной машины.
Устройство включает датчик 1 угловой скорости насосного колеса и датчик 2 угловой скорости турбинного колеса гидротрансформатора. Выходы датчиков I и 2 соединены с входами блока 3 деления. Выход блока 3 деления соединен с входом первого блока 4 функционального преобразования, а его выход - с входом первого бЛока 5 умножения причем второй вход первого блоки 5 умножения соединен с выходом квадратора 6, вход которого соединен с выходом датчика 1 угловой скорости насосного колеса.
Второй блок 7 з множения, блок 8 переменных коэффициентов, датчик 9 угловой скорости ведомого колеса, датчик 10 номера включенной передачи соединены между собой следующим образом.
Выход датчика 10 номера включенной передачи соединен с входом блока 8 переменных коэффициентов. Второй вход блока 8 переменных коэффициентов соединен с выходом датчика 9 угловой скорости ведомого колеса. Выход блока 8 переменных коэффициентов соединен с первым входом второго блока 7 умножения.
Вход блока 11 постоянного запаздывания соединен с первым выходом второго блока 7 умножения. Выход блока 11 постоянного запаздывания соединен с первым входом блока 12 сравнения. Второй вход блока 12 сравнения соединен с вторым выходом второго блока 7 умножения.
Первый выход датчика 13 загрузки рабочего органа соединен с одним из входов блока 14 управления рабочим органом. Другой вход блока 14 управления рабочим органом соединен с выходом блока 12 сравнения.
0
5
0
5
0
0
5
0
5
Вход первого дифференцирующего блока 15 соединен с выходом датчика 9 угловой скорости ведомого колеса (на фиг,1 ведомым колесом является переднее колесо) землеройно-транспортной машины.
Один из входов блока 16 коэффициентов вращающихся масс соединен с выходом датчика 10 номера включенной передачи. Выход блока 16 коэффициентов вращающихся масс соединен с одним из выходов сумматора 17. Другой вход сумматора 17 соединен с выходом первого блока 5 умножения, а выход сумматора 17 - с вторым входом второго блока 7 умножения.
Вход второго блока 18 функционального преобразования соединен с вторым выходом датчика 13 загрузки рабочего органа. Выход блока 18 соединен с одним из входов третьего блока 19 умножения, с другим входом которого соединен выход первого дифференцирующего блока 15, Выход третьего блока 19 умножения соединен с вторым входом блока 16 коэффи- 1щентов вращающихся масс.
Выход второго блока 18 функцио- Нбшьного преобразования соединен с входом второго дифференцирующего блока 20, выход которого соединен через блок 21 коэффициентов передачи с одним их входов четвертого блока 22 умножения, К другому входу последнего подключен выход датчика 9 угловой скорости ведомого колеса, а его выход соединен с входом сумматора 17,
Устройство работает следующим образом .
На выходе датчиков 1 и 2 формируются сигналы, пропорциональные угловым скоростям насосного и турбинного колес. Арифметический блок 3 деления формирует сигнал, пропорциональный кинемат}1ческому отношению гидротрансформатора. Первый блок 4 функционального преобразования настроен на получение функционгшьиой зависимости коэффициента крутящего момента турбинного колеса гидротрансформатора от кинематического передаточного отношения гидротрансформатора, .
Арифметический квадратор 6 формирует сигнал, пропорциональный квадрату числа оборотов за единицу времени насосного колеса. На выходе первого блока 5 умножения формируется сигнал, пропорциональный крутящему моменту на турбинном колесе гидротрансформатора ,
Сигнал датчика 9, пропорциональный угловой скорости ведомого колеса машины, совместно с сигналом датчика 10 номера включенной передачи, поступает на блок 8 переменных коэффициентов, который формирует сигнал, пропорциональный скорости машины на данной передаче и приведенный к тзфбинному валу гидротрансформатора.
Второй блок 18 функционального преобразования настроен на получение функциональной зависимости веса всей машины от загрузки рабочего органа От датчика 13 загрузки рабочего органа поступает сигнал, пропорциональ ный степени загрузки рабочего органа, на второй блок 18 функционального преобразования. Сигнал, пропорциональный весу машины, поступает из второго блока 18 функционального преобразования на один из входов третьего блока 19 умножения.
Этот же сигнал, пропорциональный весу машины на данный момент времени, поступает на вход второго дифференцирующего блока 20, на выходе из которого формируется сигнал, соответствующий выражению
dG dt
где G - вес машины с грунтом; t - время;
d -,знак дифференцирования. Блок 21 коэффициентов передачи представляет собой набор коэффициентов, включенных перед инвертором
Нужньй коэффициент включается при включении одной из п передач. Это достигается путем включения вторых постоянно разомкнутых контактов, например блока 16 коэффициентов вращающихся масс, последовательно с соответствующими контактами блока коэффициентов передачи. Причем эти постоянно разомкнутые контакты могут находиться или в блоке 16, или в блоке 2.
Из второго блока 20 дифференцирования сигнал поступает на бЛок 21 коэффициентов передачи, где преобразуется в сигнал
dG
-аГ
Сигнал от блока 21 коэффициентов передачи поступает на четвертый блок 22 умножения, где сигналы от блока 21 коэффициентов передачи и от датчика 9 угловой скорости колеса перемножаются с учетом знака продиф ференцированной величины веса машины. На выходе из четвертого блока 22 умножения получается выражение момента от реактивной силы, приведенного к турбинному валу или колесу гидротрансформатора
м -i-. Р g dt
W ---- n Ih
в этом выражении V W-r,
где V - линейная скорость машины; W - угловая скорость колеса
dm dt
-i. g
dG dt
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1978 |
|
SU726278A1 |
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1980 |
|
SU899806A1 |
| Устройство управления рабочимиОРгАНАМи зЕМлЕРОйНО-ТРАНСпОРТНыХМАшиН C гидРОМЕХАНичЕСКОй ТРАНСМиССиЕй | 1979 |
|
SU804790A1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| РЕГУЛИРУЕМЫЙ ГИДРОТРАНСФОРМАТОР | 2016 |
|
RU2620175C1 |
| Гидравлическая система управления гидромеханической передачей трансмиссии транспортного средства | 1990 |
|
SU1736771A1 |
| СПОСОБ РАБОТЫ ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2626782C1 |
| СПОСОБ РАБОТЫ ТРАНСМИССИИ АВТОМОБИЛЯ | 2016 |
|
RU2620034C1 |
| СПОСОБ РАБОТЫ ГИДРОТРАНСФОРМАТОРА ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2626449C1 |
| Система автоматического управления гидромеханической трансмиссией | 1988 |
|
SU1602772A1 |
Изобретение относится к земле- ройно-транспортным средствам. Цель изобретения - повьшение точности регулирования за счет повышения замера тяговой мощности. Для этого устройство имеет второй дифференциальный блок 20, блок 21 коэффициентов передачи, четвертый блок 22 умножения, второй блок 18 функционального преобразования, датчик 1 угловой скорости ведомого колеса, сумматор 17, датчик 13 загрузки рабочего органа. От последнего поступает сигнал, пропорциональный степени загрузки рабочего органа, на блок 18, который настроен на получение функциональной зависимости массы всей машины от загрузки рабочего органа. Этот же сигнал поступает на блок 20, где он преобразуется и подается на блок 22, откуда получается выражение момента от реактивной силы переменных масс, приведенное к турбинному колесу гидротрансформатора. После сложения сигналов в сумматоре 17 на выходе из него получается сигнал, пропорциональный тяговой мощности машины, с учетом мощности на преодоление силы инерции и реактивной силы силы от перемены массы.1 ил. (Л с 00 а со 1 00 1Ч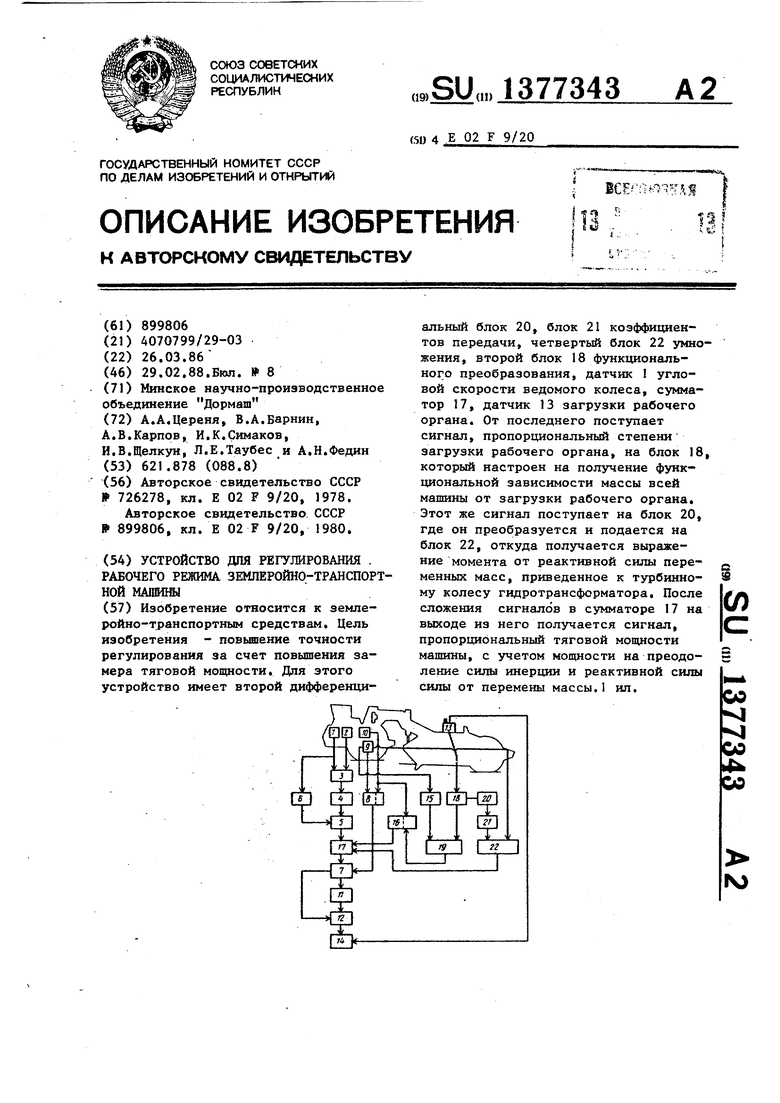
К
г - динамический радиус колеса
машины;
i - передаточное число турбин- ный вал гидротрансформатора - колесо на п-й передаче; - КПД трансмиссии от гидротрансформатора до колеса на п-й передаче;
ускорение свободного падения;
п-й коэффициент.
45
где m - масса машины. Реактивная сила
F - Р dt
V.
Умножение ее на г дает соответствующий реактивный момент на колесе машины, а деление на вьфажение дает реактивный момент на турбинном колесе гидротрансформатора.
Таким образом, на сумматор 17 поступают сигналы: из первого блока 5 умножения - сигнал, пропорциональный крутящему моменту на турбинном
колесе гидротрансформатора; из блока 16 коэффициентов вращающихся масс-сигнал, пропорциональный моменту от силы инерции и приведенный к турбинному колесу гидротрансформатора ; из четвертого блока 22 умножения - сигнал, пропорциональный моменту от реактивной силы переменных масс и приведенный к турбинному колесу гидротрансформатора.
После сложения в сумматоре 17, сигнал суммарного момента поступает на второй блок 7 перемножения, на выходе которого после перемножения линейной скоростью машины, приведенной к турбинному колесу, получается сигнал, пропорциональный тяговой мощности машины, приведенной к турбинному колесу с учетом мощности на преодоление силы инерции машины и мощности на преодоление реактивной силы от перемены массы.
На второй вход третьего блока 19 умножения поступает сигнал от датчика 9 угловой скорости ведомого колеса, который, пройдя через первый дифференцирующий блок 15, становится пропорциональным угловому уско - рению ведомого колеса. В третьем блоке 19 умножения сигналы, пропорциональные весу машины (с грунтом ) и угловому ускорению ведомого колеса, перемножаются.
Из .третьего блока 19 умножения сигнал поступает на блок 16 коэффициентов вращающихся масс, в котором кроме коэффициентов вращающихся масс, учитываются соответствующим образом радиус ведомого колеса на каждой передаче и ускорение свободного падения. Информация о включенной передаче поступает на блок 16 коэффициентов вращающихся масс от датчика 10 номера включенной передачи.
На выходе блока 16 коэффициентов вращающихся масс формируется сигнал пропорциональный моменту от силы инерции. Сигналы с первого блока 5 умножения и блока 16 коэффициентов вращающихся масс поступают на сумматор 17.
Второй блок 7 умножения, на который поступают сигналы от сумматора 17 и блока 8 переменных коэффициентов, формирует сигнал, пропорционалный тяговой мощности машины с учето
мощности на преодоление силы инерции и мощности на преодоление реактивной силы от перемены массы.
Из второго блока 7 умножения сигнал поступает на блок 11 постоянного запаздывания и одновременно на блок 12 сравнения. Из блока 11 постоянного запаздывания сигнал поступает на
второй вход блока 12 сравнения, откуда он поступает на блок 14 управления рабочим органом. На этот же блок поступает сигнал с датчика 13 загрузки рабочего органа, который срабатывает только при полной загрузке рабочего органа.
Если сигнал из второго блока 7 умножения вьш1е по величине, чем сигнал на выходе блока 11 постоянного
запаздьшания, то в блоке 12 сравнения вырабатывается сигнал, поступающий на блок 14 з равления рабочим органом, соответствующий заглублению рабочего органа. При обратном
соотношении сигналов вырабатывается сигнал, соответствующий выглублению рабочего органа. При равенстве сиг-, налов положение, рабочего органа не изменяется.
При сигнале полной загрузки рабочего органа на выходе датчика 13 на блок 14 подается команда на выглубле- ние рабочего органа, независимо от сигналов из блоков 7 и 11. Сравнение сигналов, поступающих из блоков 7 и 11, производится в блоке 12 сравнения при определенных нормах чувствительности. Пороги чувствительности настраиваются перед работой машины с учетом грунтовых условий. Удельный вес грунта учитывается при перестройке второго блока 18 функционального преобразования.
5
Формула изобретения
Устройство для регулирования рабочего режима землеройно-транспорт- ной машины по авт.св.№ 899806, отличающееся тем, что, с целью повышения точности регулирования за счет повышения точности замера тяговой мощности, оно. снабжено вторым дифференциальным блоком, блоком коэффициентов передачи и четвертым блоком умножения, причем второй выход второго блока функционального преобразования подключен че71377343
рез последовательно соединенные вто-второму входу которого подключен датрой дифференциальный блок и блокчик угловой скорости ведомого колекоэффициентов передачи к первомуса, а выход соединен с третьим вховходу четвертого блока умножения, кдом сумматора.
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1978 |
|
SU726278A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство | |||
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1980 |
|
SU899806A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
