ЯЬноего феобразозания и двух блоков , пералножения, причал ко входам арифметического блока деления подключены вы-, ходы датчике угловой скорости турбинного и васосвого колес гидротрансформатора выход последнего подключен ко ВХОДУ блока перезиноженвя а ко .. входу второго блока перемножения подк|Шочен выход блока перзленных коэффилю бЕггйв, ко входу которого подключен выход датчика номера включенной .
Недостатком этого устройства является то, что при работе поезда землеройнотранспортвых машин с гидретлеханической трашсмиссией оно не оптимизирует тяговую мощность всего поезда из-за несовпадения экстрга 5альных величин тяговой мощности поезда и отдельной машины, а также это устройство не дает возможности применять машины в составе поезда с различными характеристиками гицротрансформатора и с различным числом силовых агрегатов и обеспечить автоматизацию непрерывности технологического процесса копания.
и.ель изобретения - поддержание оптимальной тяговой мощности в процессе копания при использовании поезда землеройно-транспортных машин.
Указанная цель достигается тем, что устройство снабжено дополнительно формирователями Т51говой мощности по числу машин в поезде, блоками у прав л е- ния в датчиками полной загрузки рабочего органа каждой машиньг, датчиком угловой скорости ведомого колеса послелней машины поезда и сумматором, ко входам .которого подключены выходы вторых (. перемножения формирователей тяговой мощнос ти всех машин поезда, а выход сумматора подсоединен через последовательно соединенные блок постоянного запаздывания и блок сравнения ко входам блоков управления каждой машины, прич« 1 датчик полной рабоче- i го органа впереди Ш1у1цей машины под-j ключен к блову управления слелукяцбй за ней машины, а датчик угловой скорое .ти ведомого колеса последней машины подключен ко вхо/цг блока переменных коэффициентов всех формирователей таго- вой мощности.
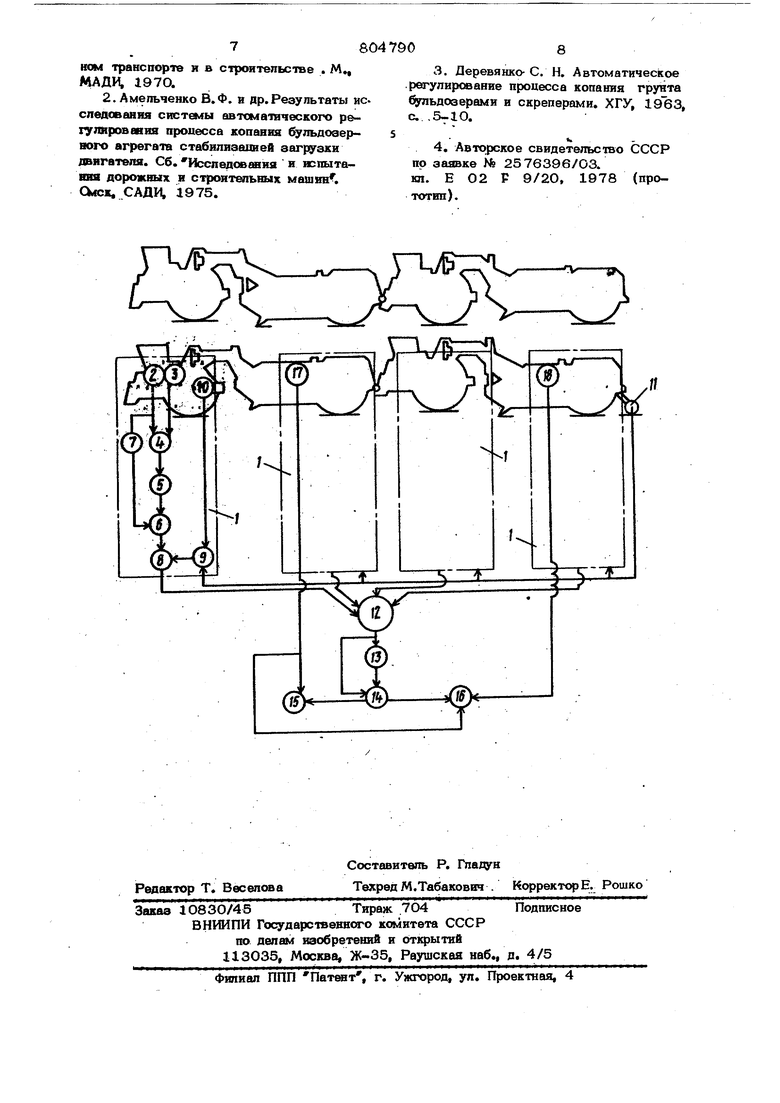
На чертеже изображен поезд эемлеройно-траЕс;портных машин, общий вид, н схема соединения 4ункциональных элемектов устройства.
Оптимизатор включает фо{ялировате ; пи 1 тяговой мощности каждого силовоГО агрегата поезда землеройно-транспорт ных машин, каждый формиров атель сое тоит из датчика 2 угловой скорости,: насосного колеса гидротрансформаТо-г ра, датчика 3 угловой скорости турбинного колеса гидротрансформатора, арифметического блока 4 деления, блока 5 функционального преобразования, первого блока 6 перемножения, арифметического квадратора 7, второго блока 8 перемножения, блока 9 переменных коэффициентов и датчика 10 номера включенной передачи. Кроме формирователей тяговой мощности оптимизатор включает датчик И угловой скорости ведомого колеса поезда, сумматор 12, блок 13постоянного запаздывания, блок 14 сравнения, блок 15 управления рабочим органом первой машины, блок 16 управления рабочим органом второй датчик 17 полной загрузки рабочего органа первой машины и датчик 18 полной загрузки рабочего органа второй машины.
Оптимизатор работает следующим обраэом.
в каждом из формирователей 1 тяговой мопшости на выходе датчиков 2 и 3 формируются сигналы, пропорциональные
угловым скоростям насосного итурбинного колес соответствующего трансформатора. Арифметический блок 4 деления формирует сигнал, пропорциональный кинематическому передаточному отношению гидротрансформатора. Блок 5 функционапь ного преобразования предварительно нас1 роен на соответствуюшую функциональную зависимость коэффициента крутящего момента турбинного колеса гидротрансформатора от кинематического передаточного отношения гидротрансформатора. Арифметический квадратор 7 формирует сигнал, пропорциональный квадрату числа оборотов за единицу времени насосно го колеса. На выходе первого блока 6 перемножения формируется сигнат}, пропорциональный крутящему моменту на турбинном колесе гидротрансформатора. Сигнал датчика. 11, пропорциональный угловой скорости ведомого колеса поезда, совместно с сигналом датчика 1О номера включенной передачи, поступает на блок 9 переменных коэффициентов, который формирует сигнал скорости машины на передаче, приведенный к турбинному валу гидротрансформаторов. Второй блок Г перемножения, на который пос тупает сигнал из первого блока 6 перемножения и бпока 9 переменных коэффиш-.
ентов формирует сигнал, пропор1дионапь ный тяговой мощности соответствующего силового агрегата. Из второго бпока 8 перемножения каждого формироватепя 1 мощности, сигналы поступают на сумматор 12, на выходе которого формируется сигнал, пропорнионапьный тяго вой мощности поезда. 1% сумматора сиг нал поступает на блок 13 постоянного запаздывания и на блок 14 сравнения. Причем на блок 14 сравнения поступает сигнал и на блока 13 постоянного эйпаэдывания. Из блока 14 сравнения сигналы поступают на оба блока 15 и 16 уп равления рабочими органами маштнш, на которые подаются сигналы от соответствующих датчиков 17 и 18 полной загрузки рабош5х. органов обеих машин, а на вход блока 16 управления органом второй машины подается сигнал и от датчика 17 полной загрузки первой машины. Если сигнал от сумматора 12 выше по величине сигнала на выходе блока 13 постоянного запаздывания;, то в блоке 14 сравнения вырабатывается, сигнал на один из блоков 15 или 16, соответствующий заглублению рабочего органа. При обратном соотношении сигналов выраб атывается сигнал. соответс1 вунхций выглублению того или тгого рабочего органа. Ши равенстве сигналов положение рабочего органа первой или второй Мишины поезда не меняется. При . срабатывании датчика 17 полной загрузки первой машшлы на блок 15 управления подается команда на выгпубпение рабочего органа первой машины .и одновременно подается команда на блок 16, ооот ветствующая заглублению рабочего органа второй машины. При срабатыванш датчика 18 подается сигнал па выгпубление органа второй машины независимо от других сигналов. Таким образом, блоки 15 и 16 являются попеременио включенными и осуществляется непрерывный режим копания по способу тяни - толкай
Использование предлагаемого изобретения позволяет поддерживать оптимальную Т говую мощность в процессе копания поезда з ем л еройн о-транспортных ма- шин с гидромеханической трансмиссией, применять в составе поезда машин с различными характеристиками гидротрансфо{ маторов, с различным числом силовых агрегатов и, кроме того, обеспечить автоматизацию непрерывности технологического процесса копания. Формула изобрете.иия
Устройство управления рабочими органами зем л еройно-транс портных машин с
гидромеханической трансмиссией, включа-, ющее последовательно соединенные блок постоянного запаздывания и блок сравнения, выход которого подключен к блоку управления рабочим органом, ко второму входг которого подключен датчик полной загрузки рабочего органа, и формирователь тяговой мощности, состоящий из датчиков угловой скорости насосного к lypбшгаого колес гидротрансформатора, датчика номера вклю1ченной передачи, . метического квадратора, бпока переменных коэффишентов, псюпедовательно .. соединенных арЕфметического блока детгенкя , бпока функционального tipedd| a3OBaкия и двух блоков перемножения, причем ко входам арифметического блока деления подключены выходы датчиков угловой скорости турбинного и насосного колес гидротрансформатора, выход последнего подключен ко входу первого блока перемнЬжения, а ко входу второго блока пера гножения подключен выход блока переменных коэффициентов, ко входу кОторого подключен выход датчика номера включенной передачи, отличающееся тем, что, с пепью поддержания oibтимальной тяговой мощности в процессе копания при использовании поезди земпвройно-транспортных машин с различными характеристиками гидротрансфортлаторов, оно снабжено дополнительно формирсватопями тяговой мощности по числу машин в поезде, блоками управления и датчиками полной загрузки рабочего органа каждой машины, датчиком угловой скорости ведомого колеса последней машины поезда и сумматорслу, ко входам которого подключе1Ш выходы вторых блоков пер.емножения формирователей тяговой мощности всех машин поезда а выход сумматора подсоединен через последсязатепьно соединенные блок постоянного запаздывания и блок сравнения ко входам блоке управления каждой машины, причем датчик полной загрузки рабочего органа впе реди идущей машины подключен к блову управления следующей за ней машины, а датчик угловой скорости ведомого колеса последней машины подключен ко входу блока переменных коэффициентов всех формирователей тяговой мощности.
Источники информации, принятые во внимание при экспертизе 1. Варковастов Ю. В. Экстремальные системы регулирсжания землеройно-траиспортных машин циклического действия. Автоматика и электроника на автомобипьном транспорте и в строитепьстве . М„ МАЛИ, 1970.
2. Амепьченко В.Ф. и Др.Результаты ис. следования системы автоматаческого рехуляровения npouecca копания бульдозервюго агрегата стабилизаивей загрузки двигателя. Сб. Исследовоаия и испытаввя дорожных и строительных машин. OfCK, САДИ, 1975.
3.Деревянко- С. Н. Автоматическое регулирование процесса копания грунта ьдозерами и скреперами. ХГУ, . с. .5-10.
4.Авторское свидетельство СССР по заявке № 2576396/03.
ют. Е 02 Р 9/20, 1978 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1978 |
|
SU726278A1 |
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1980 |
|
SU899806A1 |
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1986 |
|
SU1377343A2 |
| Система управления бульдозерным агрегатом | 1980 |
|
SU870614A1 |
| Система автоматического управления блокировкой гидротрансформатора транспортного средства | 1982 |
|
SU1062042A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1992 |
|
RU2011563C1 |
| Система автоматического регулирования скольжения ведущих колес машины в тяговом режиме | 1985 |
|
SU1593995A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1978 |
|
SU735718A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1988 |
|
SU1513091A1 |
| Гидросистема управления рабочим процессом бульдозера | 1983 |
|
SU1129302A1 |
