(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РАБОЧЕГО РЕЖИМА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ
1
Изобретение относится к аЕзтоматизации управления работы землеройно-транспортной машины, а именно к устройству для управления рабочим органом землеройнотранспортной машины с гидромеханической трансмиссией.
Известно устройство для регулирования рабоче10 режима землеройнотранспортной MaujHiif-.i, содержащее датчик и задатчик на 1-рузки, элемент сравнения, усилитель управляюн1его сигнала, AieweiiT настройки задатчика исполнительного механизма 1.
Недостатком v.Toro устройства является то, что нагрузка магиик-ы о 1ределяется по косвенному iiapaMCTpy -- углоЕюй скорости вала д.чигате.. Однако частота врашения ва.ла двигателя не отражает нагруженность .машины.
Известно также устройстве; для регулирования рабочего режима землеройно-транспортной машины с гидромеханической трансмиссией,включаю цее в себя датчик угловой скорости насосного колеса гидротрансформатора, датчик загрузки рабочего ор|ана, блок управления рабочим органом, датчики угловой скорости турбинного колеса гидрс трансформатора и ведомого колеса
маншны, датчик номера включенной передачи, арифметический квадратор, блок переменных коэффициентов,арифметический блок деления, первый блок функционального преобразования, первый и второй блоки пере.множения, блок постоянного запаздывания и блок сравнен:1я 2.
Недостатком этого устройства является то, что при замед.пении землеройно-трансгюртной машины в рабоче.м режиме на рабочий орган может поступить нреждевременно сиг10нал на его выглубление. так как не учитывается во всем балансе тя1овой .MOUIHOCTH мошность силы инерции, а при ускорении землеройно-транснортной машины в рабочем режиме на рабочий орган может преждевременно сигнал на его заг.муб15ление по той же причине. В связи с тем. что масса землеройно-транспортных MamiiH высока, опережение и запаздывание сигнала на выгубление - заглубление рабочего органа может внести нежелагельные коррек20тивы на выполнение рабочего режима.
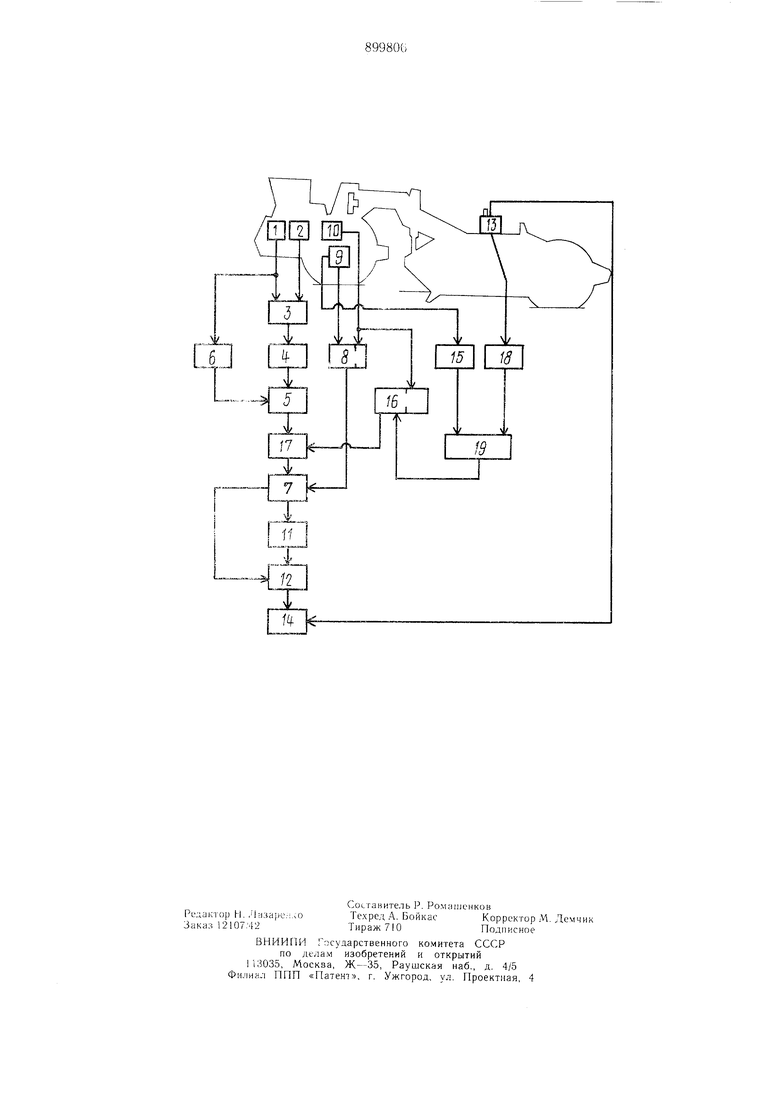
Цель изобретения - повышение точности регулирования за счет пов11||пения точ1юст;1 замера тяговой мошности. Поставленная цель достигается тем, что устрайство снабжено дифференцирующим блоком, блоком коэффициентов вращающихся масс, вторым блоком фнкционального преобразования, третьим блоком перемножения и сумматором, включенным между нервым и вторым блоками перемножения и соединенным с выходом блока коэффициента вращающихся масс, ко входам которого подключены выход датчика номера, включенной передачи и выход третьего блока перемножения, входы которого соединены с выходами дифференцирующего блока и BTOpoio блока функционального преобразования, причем вход дифференцирующего блока соединен с датчиком угловой скорости ведомого колеса, а вход второго блока функционального преобразования - с выходом загрузки рабоче1Ч) органа. На чертеже представлена схема соединения элементов устройства. Устройство состоит из датчика I угловой скорости nacocHoio колеса, датчика 2 угловой скорости турбинного колеса, арифметического блока 3 деления, первого блока 4 фу 1кционально1о преобразования, первого блока 5 перемножения, арифметического квадратора 6, второго блока 7 перемножения, блока 8 переменных коэффициентов, датчика 9 угловой скорости ведо.мого колеса, датчика 10 но.мера включенной передачи, блока 11 постоянноп; запаздывания, блока 12 сравнения, датчика 13 загрузки раб{ 1-его органа, блока 14 управления рабочим 0)), дифференцирующего блока 15, олока 16 коэффициентов вращающихся масс, су.мматора 17, второго блока 18 функцио 1ального преобразования, третьего блока 19 перемножения. Устройство работает следующим образом. На выходе датчиков 1 и 2 формируются сигналы, пропорциональные угловым скоростям насосного и турбинного колес. Ариф.метический блок 3 деления формирует сигнал, пропорциональный кинематическому отношению гидротрансформатора. Первый блок 4 функционального преобразования предварительно настроен на получение функциональной зависимости коэффициег та крутящего момента турбинного колеса гидротрансформатора от кинематического передаточного отноьаения гидротрансформатора. Арифметический квадратор 6 формирует сигнал, пропорциональный квадрату числа оборотов за единицу времени насосного колеса. На выходе первого блока 5 перемноже ния формируется сигнал, пропорциональный крутящему моменту на турбинном колесе гидротрансформатора. Сигнал датчика 9, пропорциональный угловой скорости ведомого колеса машины, совместно с сигналом датчика 10 номера включенной передачи, поступает на блок 8 переменных коэффициентов, который формирует сигнал, пропорциональный скорости машины на данной передаче и приведенный к турбинному валу гидротрансформатора. Второй блок 18 функционального преобразования предварительно настроен на получение функциональной зависимости веса всей машины от загрузки рабочего органа. Сигнал, пропорциональный стег1ени загрузки рабочего органа, поступает на второй блок 18 функциопального преобразования от датчика 13 загрузки рабочего органа. Сигнал, пропорциональный весу машины, поступает из второго блока 18 функционального преобразования на один из входов третьего блока 19 перемножения. На второй вход третьего блока 19 перемножения поступает сигнал от датчика 9 угловой скорости ведомого колеса, который, пройдя через дифференцирующий блок 15, становится пропорциональным угловому ускорению ведомого колеса. В третьем блоке 19 перемножения сигналы, пропорциональные весу машины и угловому ускорению Е5едомого колеса, перемножаются. Из третьего блока 19 перемножения сигнал поступает на блок 16 коэффициентов вращающихся масс, в котором, кроме коэффициентов вращающихся масс, учитывается соответствующим образом радиус ведомого колеса на каждой передаче и ускорение свободного падения. Информация о включенной передаче поступает на блок 16 коэффициентов вращающихся масс от датчика 10 номера включенной передачи. На выходе блока 16 коэффициентов вращающихся масс формируется сигнал м,--4Р- о где Mj -.момент от силы инерции; S - коэффициент учета вращающихся масс по передачам; г - радиус ведомого колеса; G - вес машины с учетом загрузки рабочего органа; -jj;-ускорение машины; ig -ускорение свободного падения. Сигналы от первого блока 5 перемножения и от выхода блока 16 коэффициентов вращающихся масс поступают на сумматор 17. На выходе сумматора 17 формируется алгебраическая сумма тягового момента с учетом инерционной массы. Второй блок 7 перемножения, на который поступают сигналы из, выхода сумматора 17 и блока 8 перемножения коэффициентов, формирует сигнал, пропорциональный тяговой мощности мащины с учетом мощности на преодоление силы инерции. Из второго блока 7 перемножения сигнал поступает на блок 11 постоянного запаздывания и одновременно на блок 12 сравнения. Из блока 11 постоянного запаздывания сигнал поступает на второй вход блока 12 сравнения, откуда поступает на блок 14 управления рабочим органом. На этот же блок поступает и сигнал от датчика 13 загрузки рабочего органа, который срабатывает только при полной загрузке рабочего органа.
Если сигнал из второго блока 7 перемножения выше по величине, чем сигнал на выходе блока 11 постоянного запаздывания, то в блоке 12 сравнения вырабатывается сигнал на блок 14 управления рабочим органом, соответствующий заглублению рабочего органа.
При обратном соотношении сигналов вырабатывается сигнал, соответствующий выглублению рабочего органа. При равенстве сигналов положение рабочего органа не изменяется.
При сигнале полной загрузки рабочего органа на выходе датчика 13 загрузки рабочего органа на блок 14 подается команда на выглубление рабочего органа, независимо от сигналов из блоков 7 и 11.
Сравнение сигналов, поступающих из блоков 7 и 11, производится в блоке 12 сравнения при определенных порогах чувствительности. Пороги чувствительности настраиваются перед работой машины с учетом грунтовых условий. Удельный вес грунта учитывается при перестройке второго блока 18 функционального преобразования.
Применение устройства позволяет повысить точность замера тяговой мощности за счет учета мощности силы инерции. Это обеспечивает повышение точности регулирования рабочего режима и увеличение производительности землеройно-транспортной машины.
Формула изобретения
Устройство для регулирования рабочего режима землеройно-транспортной машины с
гидромеханической трансмиссией, содержащее датчик угловой скорости насосного колеса гидротрансформатора, датчик загрузки рабочего органа, блок управления рабочим органом, датчики угловой скорости турбинного колеса гидротрансформатора и ведомого колеса машины, датчик номера включенной передачи, арифметический квадратор, блок переменных коэффициентов, арифметический блок деления, первый блок
O функционального преобразования, первый и второй блоки перемножения, блок постоянного запаздывания и блок сравнения, отличающееся тем, что, с целью повышения точности регулирования, оно снабжено дифференцирующим блоком, блоком коэффициентов вращающихся масс, вторым блоком функционального преобразования, третьим блоком перемножения и сумматором, включенным между первым и вторым блоками перемножения и соединенным с выходом
0 блока коэффициентов вращающихся масс, ко входам которого подключены выходы датчика номера, включенной передачи и выход третьего блока перемножения, входы которого соединены с выходами дифференцирующего блока и второго блока функционального преобразования, причем вход дифференцирующего блока соединен с датчиком угловой скорости ведомого колеса, а вход второго блока функционального преобразования - с вы.ходом датчика загрузки рабочего органа.
Источники информации, принятые во внимание при экспертизе
1.Деревянко С. Н. Автоматическое регулирование процесса копания грунта бульдозерами и скреперами. Изд-во Х2У, 1963, с. 5-10.
2.Авторское свидетельство СССР
№ 726278. кл. Е 02 Т 9/20, 1978 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1986 |
|
SU1377343A2 |
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1978 |
|
SU726278A1 |
| Устройство управления рабочимиОРгАНАМи зЕМлЕРОйНО-ТРАНСпОРТНыХМАшиН C гидРОМЕХАНичЕСКОй ТРАНСМиССиЕй | 1979 |
|
SU804790A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1986 |
|
SU1439272A1 |
| РЕГУЛИРУЕМЫЙ ГИДРОТРАНСФОРМАТОР | 2016 |
|
RU2620175C1 |
| Устройство для автоматического управления рабочим режимом землеройно-транспортной машины | 1980 |
|
SU891868A1 |
| Система управления бульдозерным агрегатом | 1980 |
|
SU870614A1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для автоматического регулирования загрузки бульдозера | 1976 |
|
SU618510A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ГИДРОАГРЕГАТОВ ПЕРЕДАЧ | 2021 |
|
RU2765817C1 |