(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РАБОЧЕГО РЕЖИМА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1980 |
|
SU899806A1 |
| Устройство управления рабочимиОРгАНАМи зЕМлЕРОйНО-ТРАНСпОРТНыХМАшиН C гидРОМЕХАНичЕСКОй ТРАНСМиССиЕй | 1979 |
|
SU804790A1 |
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1986 |
|
SU1377343A2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2131961C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ В ПРОЦЕССЕ КОПАНИЯ ГРУНТА | 2006 |
|
RU2327010C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
| Гидросистема управления рабочим процессом бульдозера | 1983 |
|
SU1129302A1 |
| Система управления бульдозерным агрегатом | 1980 |
|
SU870614A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1986 |
|
SU1439272A1 |
| Гидромеханическая многоконтурная передача прямого хода транспортного средства | 1982 |
|
SU1036581A1 |
Изобретение относится к автоматизации процессов работы землеройно-транспортной машины, а именно к устройству для управления рабочим органом землеройно-транспортной 4ашины с гидромеханической трансмиссией. Известны устройства для регулирования рабочего процесса землеройно-транспортных машин, в которых измерение нагрузки производится путем измерения как тягового усилия, так и скорости машины 1. Наиболее близким к предлагаемому является устройство для регулирования рабочего режима землеройно-транспортной машины с гидромеханической трансмиссией, включающее датчик угловой скорости насосного колеса гидротрансформатора и датчик полной загрузки рабочего органа, соединенный с одним из входов блока управления рабочим органом |2|. Известное устройство неприменимо для гидромеханических трансмиссий, так как обороты вала двигателя не отражают загрузку машины. Цель изобретения - поддержание оптимальной тяговой мощности в процессе копания путем целенаправленного изменения глубины копания. Цель достигается тем, что устройство снабжено датчиками угловой скорости турбинного колеса гидротрансформатора и ведомого колеса машины, датчиком номера включенной передачи, арифметическим квадратором, блоком переменных коэффициентов и последовательно соединенными арифметическим блоком деления, блоком функционального преобразования, первым и вторым блоком перемножения, блоком постоянного запаздывания и блоком сравнения, причем ко входам арифметического блока деления подключены выходы датчика угловой скорости турбинного колеса гидротрансформатора и датчика угловой скорости насосного колеса гидротрансффматора, подключенного через арифметический квадратор к первому блоку перемножения. Ко входу второго блока перемножения подключен выход блока переменных коэффициентов, ко входам которого подключены выходы датчика угловой скорости ведомого колеса машины и датчика номера включенной передачи. Выход второго блока перемножения соединен со входом блока сравнения.
ШодкотО рого подключен ко второму входу блока управления рабочим органом.
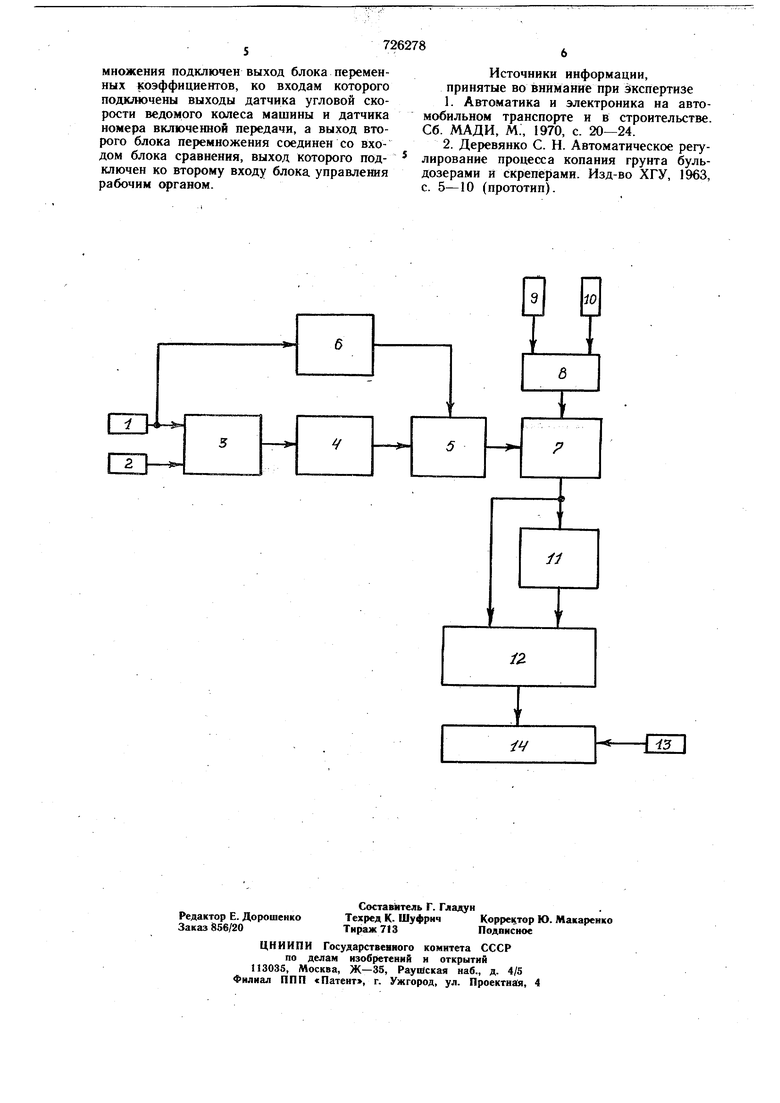
На чертеже представлена блок-схема устройства для регулирования рабочего режима землройно-транспортной машины.
Устройство состоит из датчика 1 угловой скорости насосного колеса, датчика 2 угловой скорости турбинного колеса, арифметического блока деления 3, блока функционального преобразования 4, первого блока умножения 5, арифметического квадратора 6, второго блока умножения 7, блока переменных коэффициентов 8, датчика угловой скорости ведомого колеса машины 9, датчика номера включенной передачи 10, блока постоянного запаздывания 11, блока сравнения 12, датчика полной загрузки рабочего органа 13 и блока 14 управления заглублением-выглублением рабочего органа.
Работает устройство следующим образом.
На выходах датчиков 1 и 2 формируются сигналы, пропорциональные угловым скоростям насосного и турбинного колес. Арифметический блок деления 3 формирует сигнал, пропорциональный кинематическо-щ передаточному отношению гидротрансформатора:
i
WH
где « -угловая с корость турбинного колеса;
ы„ - угловая скорость насосного колеса. Блок функционального преобразования 4 предварительно настроен на получение зависимости:РЛ, D5 f{irm ), где Р - плотность рабочей жидкости; Л -коэффициент крутящего момента турбинного колеса; D - активный диаметр гидротрансформатора. В арифметическом квадраторе 6 формируется сигнал, пропорциональный квадрату числа оборотов за единицу времени насосного колеса. На выходе блока умножения 5 формируется сигнал, пропорциональный крутящему моменту на турбинном колесе. Сигнал датчика 9, пропорциональный угловой стсоростй ведомого колеса маштяны, совйестнО ссигналом at4HKa номера включенной передачи, поступает на блок переменных коэффициентов 8, который формирует сигнал, пропорциональный скорости машины на данной передаче, и приведенный к турбинному валу. Второй блок умножения 7, на который поступают сигналы из первого блока умножения 5 и блока переменных коэффициентов 8, формирует сигнал, пропорциональный тяговой мощности машины.
Из второго блока умножения сигнал поступает на блок постоянного запаздывания И и блок сравнения 12. Из блока постоянного запаздывания 11 сигнал поступает на один из входов блока сравнения 12. Из блока сравнения 12 сигнал поступает на блок 14 управления заглублением-выглублением рабочегб органа. На этот же блок поступает сигнал и от датчика 13 полной загрузки рабочего органа.
Если сигнал из второго блока умножения 7 выше по величине, чем сигнал из блока постоянного запаздывания 11, то в блоке сравнения 12 вырабатывается сигнал на на блок 14 управления заглублением-выглублением рабочего органа, соответствующий заглублению рабочего органа.
При равенстве сигналов положение рабочего органа остается прежним.
При срабатывании датчика 13 полной
загрузки рабочего органа, что бывает при
полной загрузке машины, подается сигнал
на блок 14 на выгубление рабочего органа,
независимо от сигналов из блоков 7 и 11.
Сравнение сигналов из блоков 7 и 11 производится в блоке сравнения 12 при Определенных порогах чувствительности. Пороги чувствительности регулируются перед работой машины с учетом грунтовых условий.
Возможность оценки нагруженности машины позволяет точно автоматически регулировать рабочий режим машины с гидромехнической передачей.
Формула изобретения Устройство для регулирования рабочего режима землеройно-транспортной машины с гидромеханической трансмиссией, включающее датчик угловой скорости насосного колёса гндротрансформатора и датчик полной загрузки рабочего органа, соединенный с одним из входов блока управления рабочим органом, отличающееся тем, что, с целью поддержания оптимальной тяговой мощности в процессе копания, оно снабжено датчиками угловой скорости турбинного колесса гидротрансформатора и ведомого колеса машины, датчиком номера включенной передачи, арифметическим квадратором, блоком перемеиных коэффициентов и последовательно соединенными арифметическим блоком деления, блоком функционального преобразования, первым и вторым блоком перемножения, блоком постоянного запаздывания н блоком сравнения, причем ко входам арнфметического блока деления подключены выходы датчика угловой скорости турбинного колеса гидро трансформатора и датчика угловой скорости насосного колеса гидротрансформатора, подключенного через арифметический квадратор к первому блоку перемножения, ко входу второго блока перемножения подключен выход блока переменных коэффициентов, ко входам которого подключены выходы датчика угловой скорости ведомого колеса машниы и датчика номера включенной передачи, а выход второго блока перемножения соединен со входом блока сравнения, выход которого подключен ко второму входу блока управления рабочим органом.
Источники информации, принятые во внимание при зкспертизе
