тельного органа, приварены дополнительные круглые направляющие 21, на которых закреплены ползуны 22. Сила трения, возникающая при перегоне комбайна по направляющим 12 РУ 10, передается на стойки 16 опорной балки
через ползуны 22. Чтобы наклонные ГД не мешали маневрированию в вертикальной плоскости, один из них обеими полостями соединен со сливом гидравлической системы, а у второго обе полости заперты гидрозамками. 3 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Проходческий комбайн | 1988 |
|
SU1666696A1 |
| Проходческий комбайн | 1980 |
|
SU899982A2 |
| ПРОХОДЧЕСКО-ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС (БЛОК) | 1998 |
|
RU2172410C2 |
| Проходческий комбайн | 1975 |
|
SU576407A1 |
| Проходческий комбайн | 1986 |
|
SU1411487A2 |
| УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ДОЛИНСКОГО УКД, СЕКЦИЯ КРЕПИ (ВАРИАНТЫ), ПЕРЕКРЫТИЕ КРЕПИ, ВЫДВИЖНОЙ КОЗЫРЕК, СТАВ, ЛЕНТОЧНЫЙ КОНВЕЙЕР, МЕХАНИЗМ ЦЕНТРИРОВАНИЯ ЛЕНТЫ, УСТРОЙСТВО УПРАВЛЕНИЯ КОНВЕЙЕРА, КОМБАЙН ОЧИСТНОЙ (ВАРИАНТЫ), УСТРОЙСТВО ПОДЪЕМА БАРАБАНА КОМБАЙНА, ПРИВОД ОТБОЙНОГО БАРАБАНА КОМБАЙНА, СПОСОБ ОБЕСПЫЛИВАНИЯ РАБОЧЕГО ПРОСТРАНСТВА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, МАНИПУЛЯТОР ОЧИСТНОГО КОМПЛЕКСА, ЛЕСТНИЦА СТОЕЧНАЯ | 1997 |
|
RU2130554C1 |
| ПРОХОДЧЕСКИЙ КОМБАЙН | 1968 |
|
SU212929A1 |
| Крепь сопряжения | 1985 |
|
SU1312177A1 |
| Механизированная крепь | 1988 |
|
SU1606703A1 |
| Механизированная проходческая крепь | 1988 |
|
SU1599557A1 |

Изобретение относится к горной промышленности и улучшает регулирование направления движения и маневрирования комбайна, а также снижение ZOcbonoi.,, . owo dawmeso А щита 5 - его веса; Проходческий комбайн включает основной и бермовые исполнительные органы 1 и 2, основное распорное устройство (РУ) 7 и дополнительное РУ 10. Каретка (К) 14 дополнительного РУ 10 выполнена с двумя поперечными наклонными пазами 15, расширенными вверху. На задних стенках пазов 15 закреплены круглые направляющие 12, по которым посредством гидродомкратов (ГД) 13 перемещается К 14. В пазах 15 размещается стойка 16 опорной балки, с которой К 14 соединена ГД 18. Маневрирование в горизонтальной плоскости осуществляется наклонными ГД. Стенки стоек 16 опорной балки параллельны поперечным стенкам 20 пазов 15. К стенкам 20, обращенным от исполниЮ 15 16 20 i (Л оо vi 00 00 5 - .1 . , . . тг 3 22 21 16 1Z 1211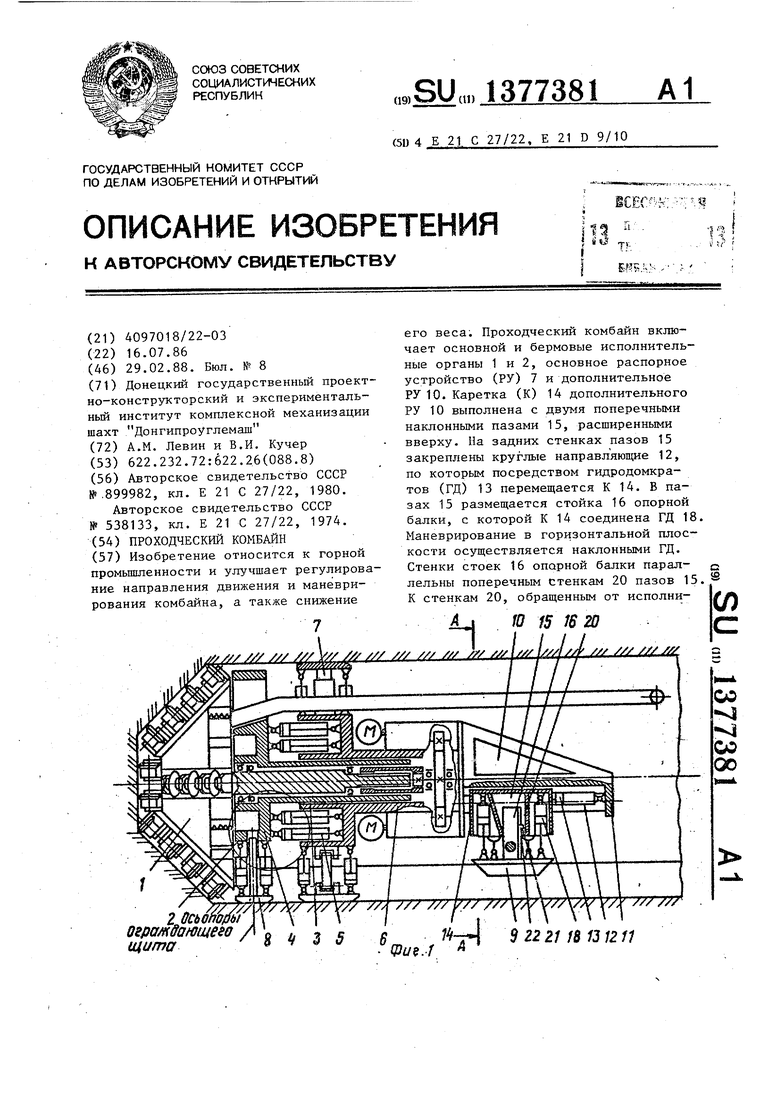
1
Изобретение относится к горной промышленности.
Целью изобретения является улучшение регулировки направления движения и маневрирования комбайна, а также снижение его веса.
На фиг. 1 показан комбайн, общий вид; на фиг. 2 - разрез А-А на фиг.1 на фиг. 3 - разрез Б-Б на фиг. 2.
Проходческий комбайн состоит из основного 1 и бермовых 2 исполнительных органов, закрепленных на хоботе 3 и соединенном с ним ограждающем щите 4. Хобот 3с помощью гидродомкратов 5 перемещается в корпусе 6 комбайна, закрепл енном в выработке при выполнении рабочего хода распором 7. При передвижке корпуса 6 комбайна машина удерживается в выработке на опоре 8 ограждающего щита 4 . и опорах 9 дополнительного распора 10. Дополнительный распор 10 состоит из корпуса 11 с закрепленными на нем круглыми направляющими 12, по которым с помощью гидродомкрата 13 перемещается каретка 14. При передвижке корпуса 6 комбайна распор 7 вместе с корпусом 6 движется гидродомкратами 5 и 13 по неподвижным хоботу 3 и каретке 14 дополнительного распора 10.
Каретка 14 имеет косые (наклонные пазы 15, в которых размещаются две стойки 16 опорной балки 17.
Каретка 14 соединена с опорной балкой 17 двумя парами вертикальных гидравлических домкратов 18 и двумя наклонными гидродомкратами 19. При маневрировании в вертикальной плоскости каретка 14 качается гидродомкратами 18 относительно вертикальных стоек 16 на угол, равный углу качания оси комбайна в вертикальной плоскости, поэтому косые пазы 15 каретки 14 должны расширяться в вертикальном сечении вверх на угол, не меньший угла качания оси комбайна. Чтобы наклонные гидродомкраты 19 не
5 мешали маневрированию в вертикальной плоскости, один из них обеими полостями соединен со сливом гидравлической системы, а у второго обе полости заперты гидрозамками. При маневриро Овании в вертикальной плоскости каретка 14 незначительно смещается и в горизонтальной плоскости, что при резком изменении направления движения комбайна в вертикальной плоскости обходимо учитывать.
Маневрирование в горизонтальной плоскости осуществляется наклонными гидродомкратами 19. При этом весь комбайн поворачивается вокруг вертикаль20 ной оси опоры 8 ограждающего щита 4. Пазы 15 каретки 14 смещаются относительно вертикальных стоек 16 опорной балки 17, а вертикальные гидродомкраты 18 качаются. При повороте вокруг
вертикальной оси опоры 8 ограждающего щита 4 каретка 14 дополнительного распора 10 движется по окружности.
С целью упрощения технологии изготовления каретки 14, учитывая малый
30 угол Поворота комбайна за каждый цикл передвижки, косые пазы 15 выполнены прямолинейными, но отклоненными так, чтобы перпендикуляры к середине поперечной стенки 20 косых пазов 15 пе35 ресеклись на вертикальной оси опоры 8 ограждающего щита 4. Стенки стоек 16 опорной балки 17 параллельны поперечным стенкам 20 косых пазов 15. К поперечным стенкам 20, обращенным от
40 исполнительного органа, приварены дополнительные круглые направляющие 21, на которых закреплены ползуны 22. Сила трения, возникающая при перегоне комбайна по направляющим 12 дополнительного распора 10, передается на стойки 16 опорной балки 17 через ползуны 22.
Основной вес комбайна приходится при маневрировании на опору ограждающего щита 4, поэтому трения между почвой выработки и опорами 9 дополяи- тельного распора 10 может быть недос- таточно для маневрирования машины в горизонтальной плоскости. Чтобы исключить проскальзывание опор 9, на опорной балке 17 выполнены специальные упоры 23. Чтобы опорная балка 17 не проваливалась в насыпной грунт обратного свода 24 выработки, к ней прикреплены опоры 9, опирающиеся на бермы выработки 25, образованные бермо- выми исполнительными органами 2. Чтобы опорная балка 17 не опрокидывалась вдоль выработки при опускании на нее корпуса 6 комбайна, одна из опор 9 жестко закрепляется на опорной балке 17, а вторая шарнирно. Чтобы исклю- чить опрокидывание опорной балки 17 при передвижке корпуса 6 комбайна по направляющим дополнительного распора 10, каждая поршневая полость вертикальных гидродомкратов 18 при этом запирается гидрозамками.
I
Применение предлагаемого комбайна позволяет отказаться от заднего распора комбайна, а его 4|ункции (при установке постоянной крепи вслед за бермовыми исполнительными органами) передать дополнительному распору.
,х
При этом уменьшаются масса и стой- . мость комбайна.
Формула изобретения
Проходческий комбайн, включающий корпус с исполнительным органом, ограждающим щитом, распорным устройством и дополнительным распорным устройством с кареткой и наклонными тягами, размещенными между опорной балкой и кареткой, установленной на круглых направляющих с возможностью возвратно-поступательного перемещения посредством гидродомкрата подачи каретки и связанной с вертикальными гидродомкратами с опорной балкой, на которой шарнирно закреплены опоры, отличающийся тем, что, с целью улучшения регулировки направления движения и маневрирования комбайна, а также снижения его веса, каретка выполнена с двумя поперечными наклонными пазами, расширенными .вверх, на задних стенках которых выполнены дополнительные круглые направляющие, а опорная балка на нижне поверхности выполнена с упорами по ее концам и снабжена стойками с ползунами, при этом каждай стойка расположена в наклонном пазу и связана с кареткой посредством ползуна, установленного на дополнительной круглой направляющей, а наклонные тяги выполнены в виде гидродомкратов, обе полости одного из которых заперты гидрозамками.
25
Ось опорь/ ограждающего щита Фцг.3
6-6
20 гг
| Проходческий комбайн | 1980 |
|
SU899982A2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Проходческий комбайн | 1974 |
|
SU538133A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
